This document summarizes research on developing stretchable sensors for wireless gesture recognition. Key points:
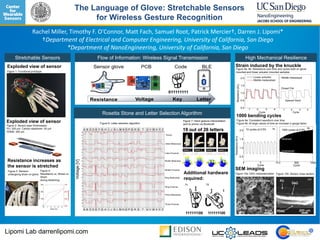
- Sensors were created using a stretchable elastomer composite and integrated into a glove to detect hand gestures through resistance changes as the glove is flexed and stretched.
- The sensors were able to accurately recognize 26 letters of the alphabet through a selection algorithm analyzing the unique resistance patterns from different gestures.
- Additional hardware was used to transmit sensor data wirelessly via Bluetooth to a phone where the gestures were interpreted.
- Testing showed the sensors maintained consistent performance over 1,000 bending cycles and could accurately transmit gestures in real-time.