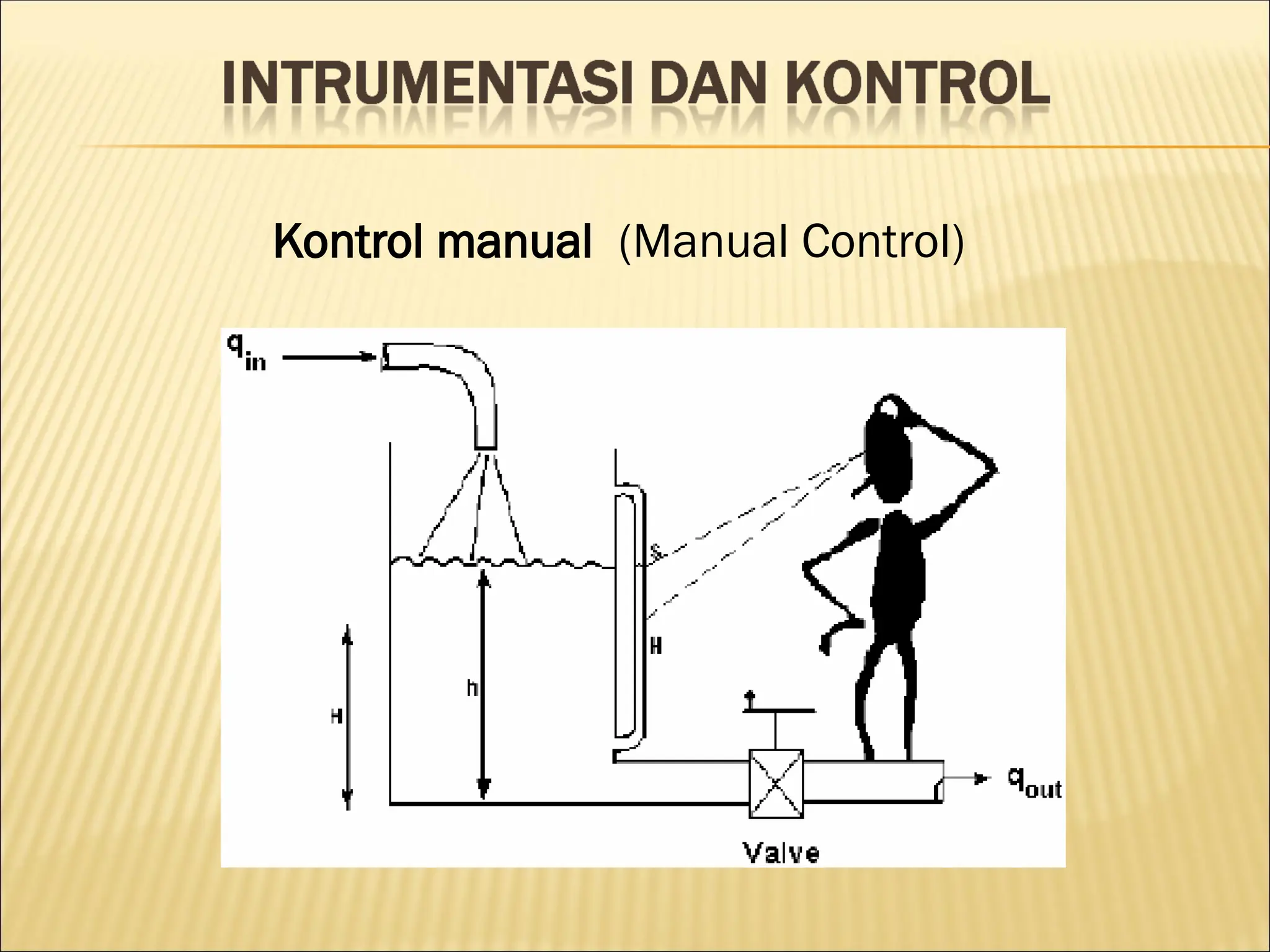
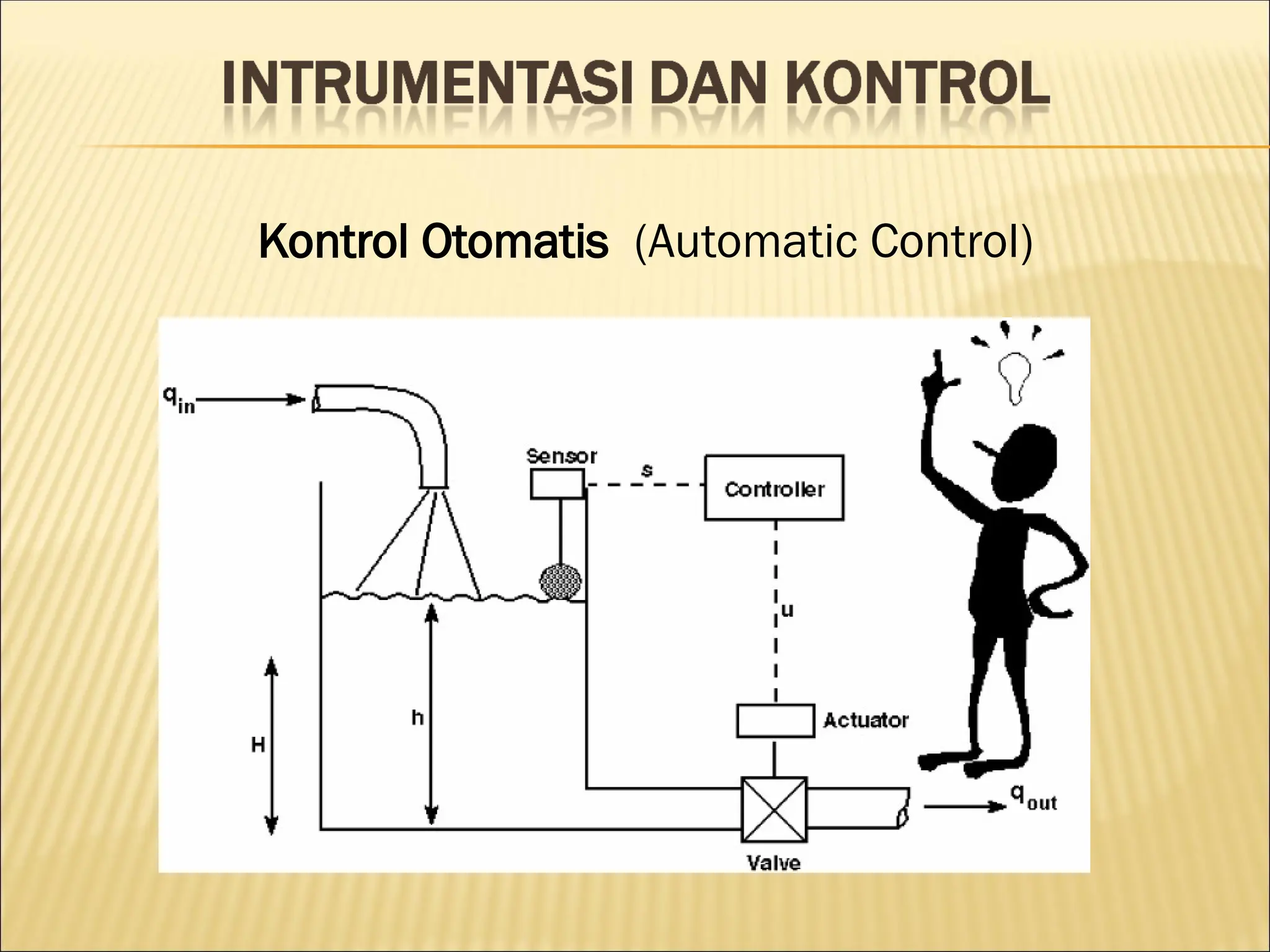
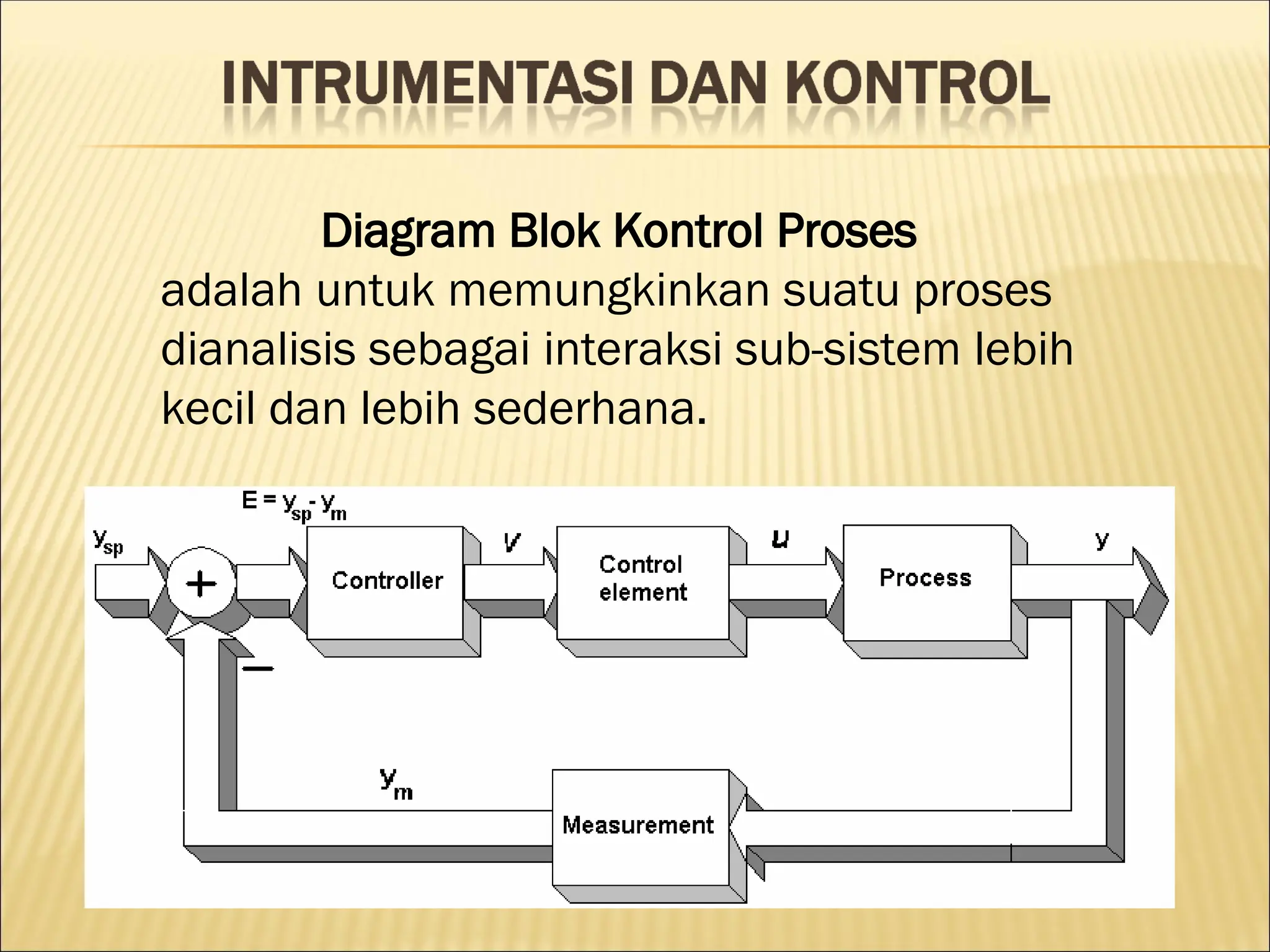
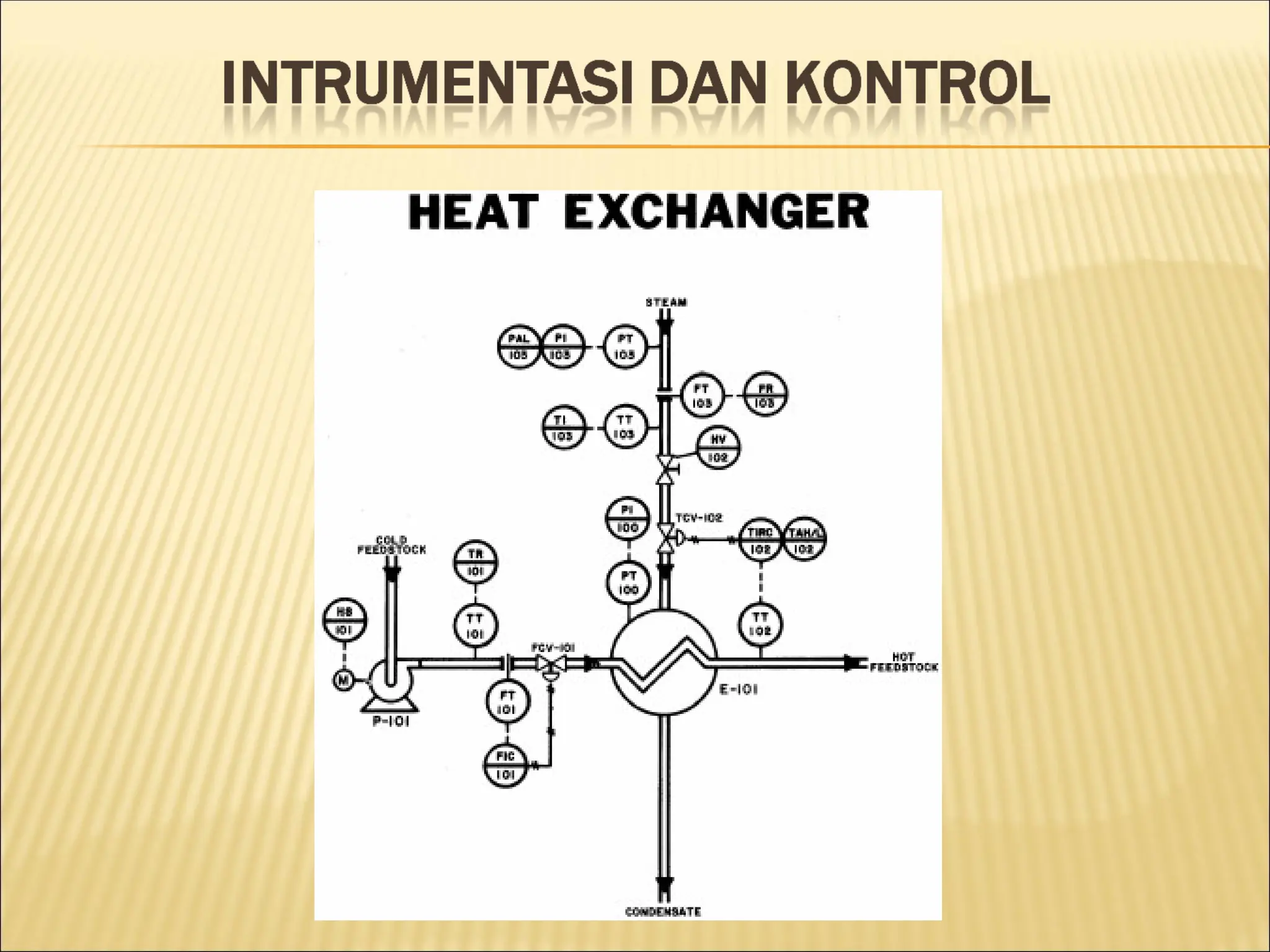
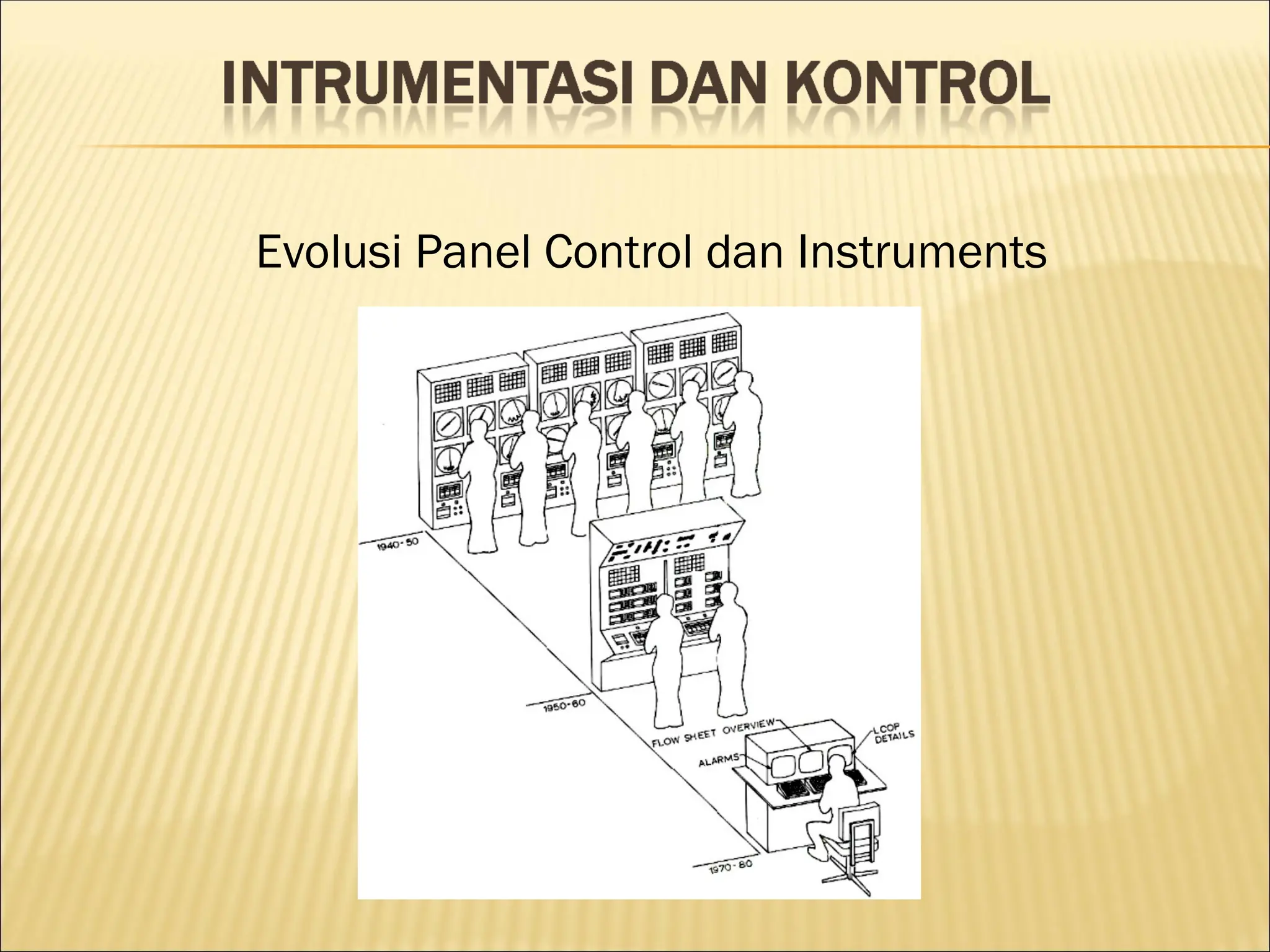
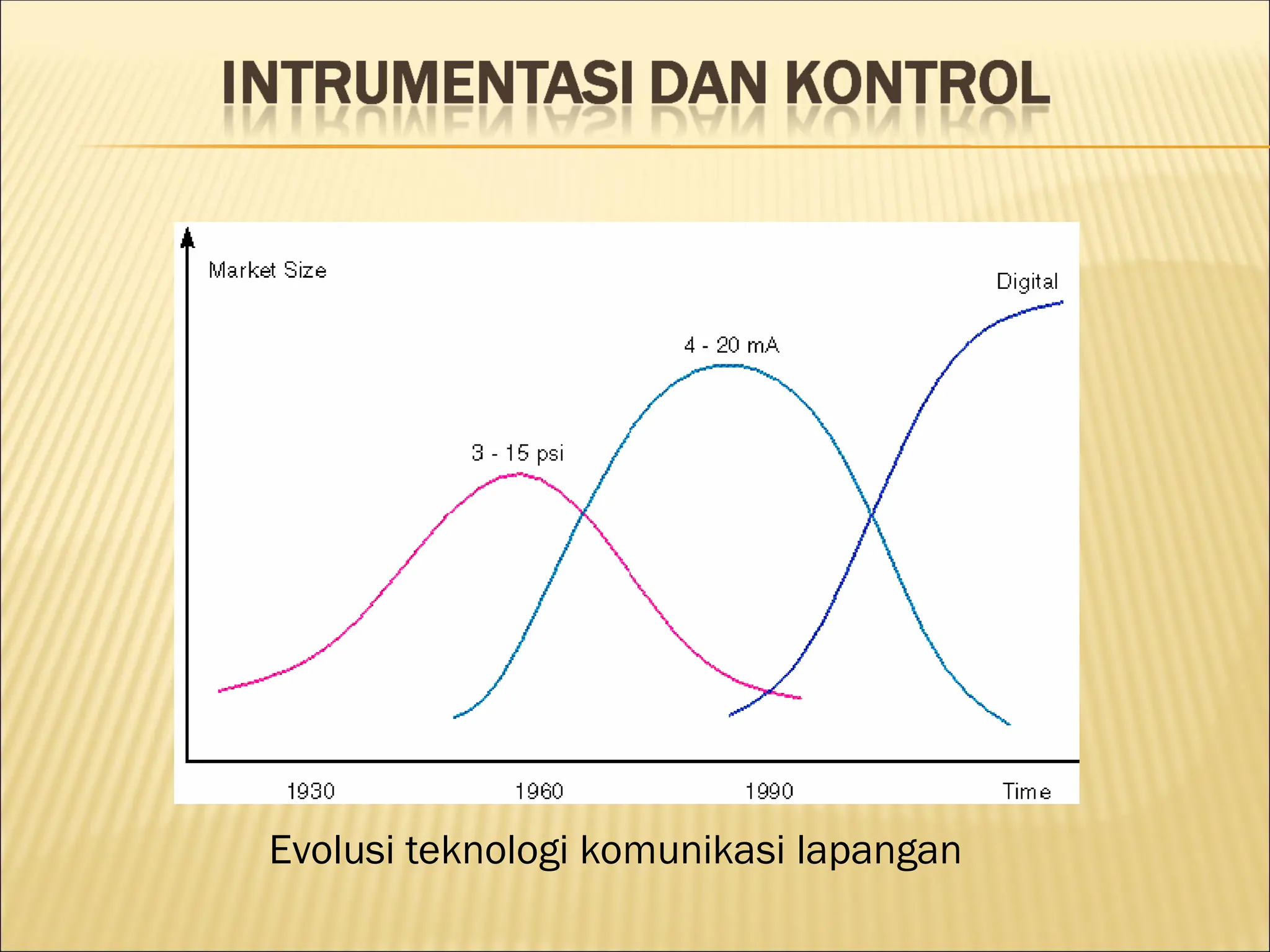
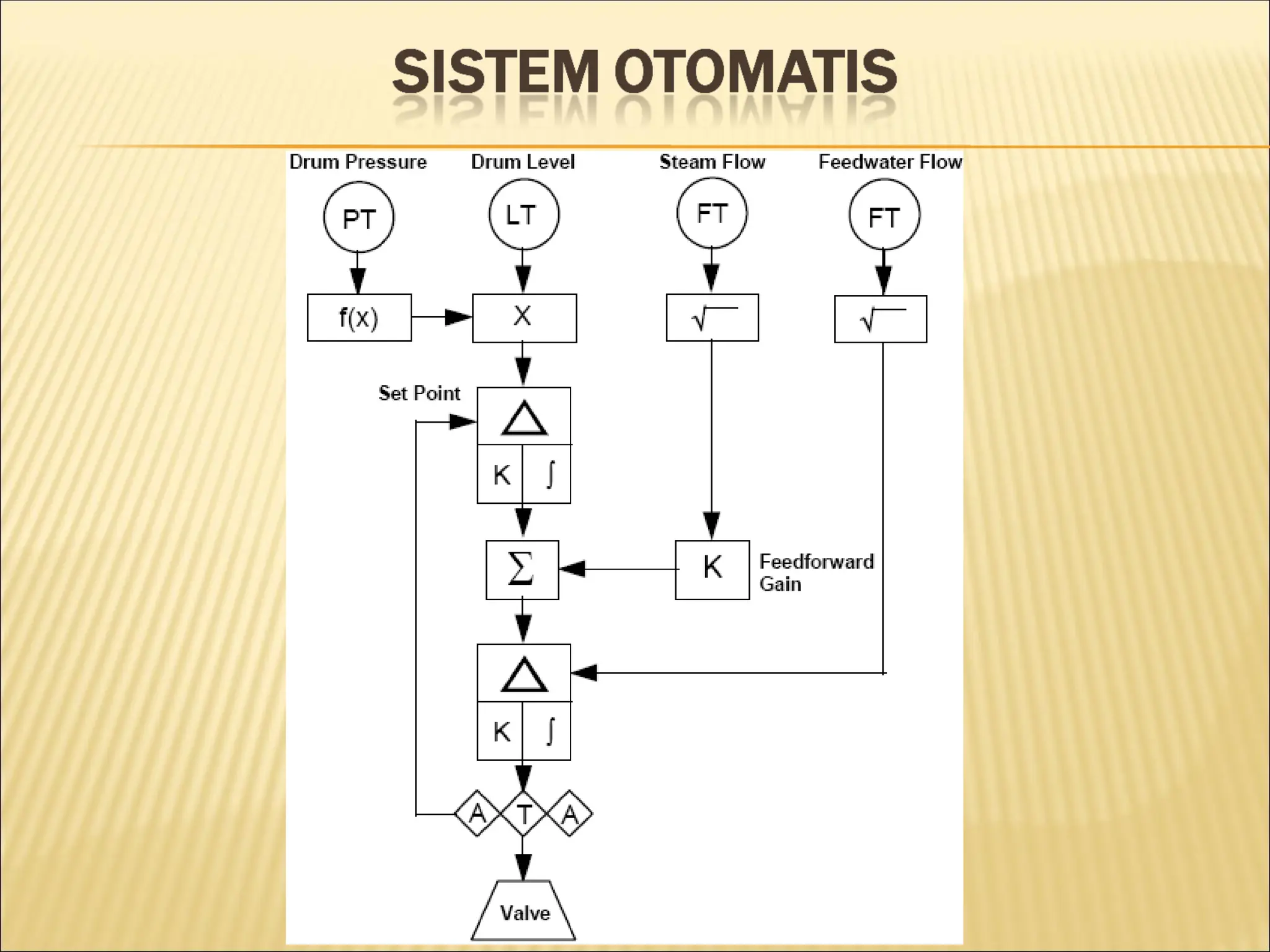
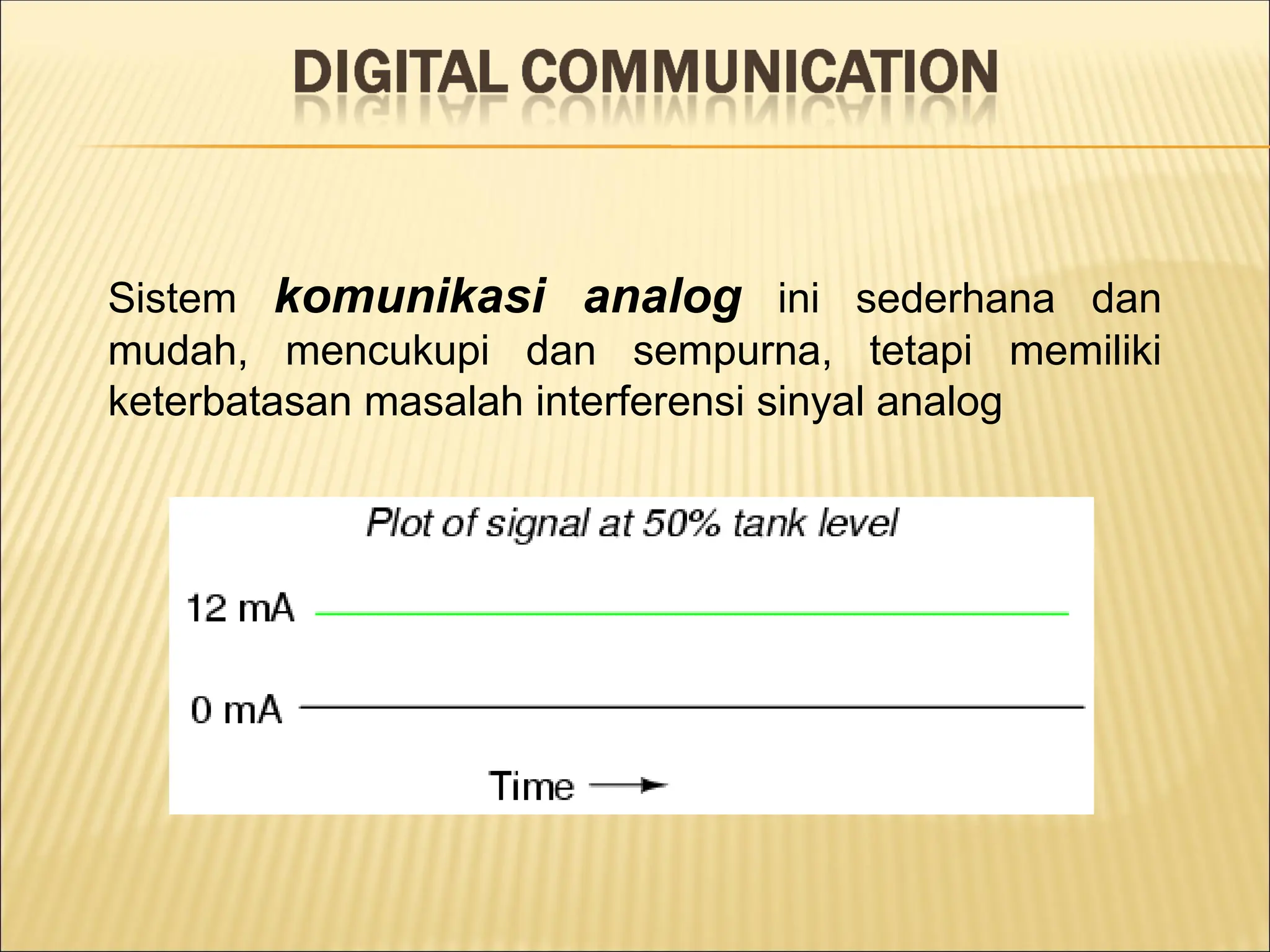
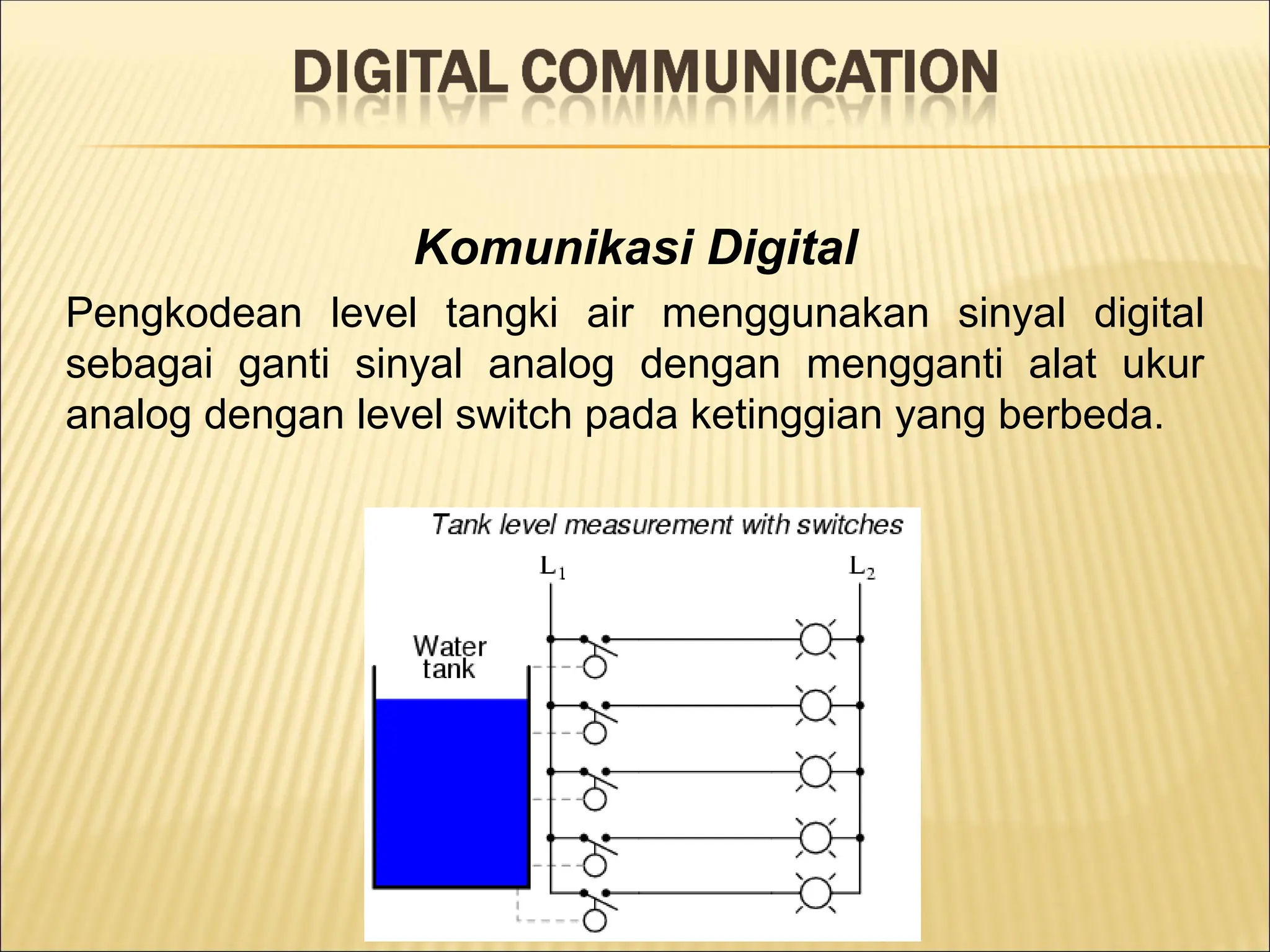
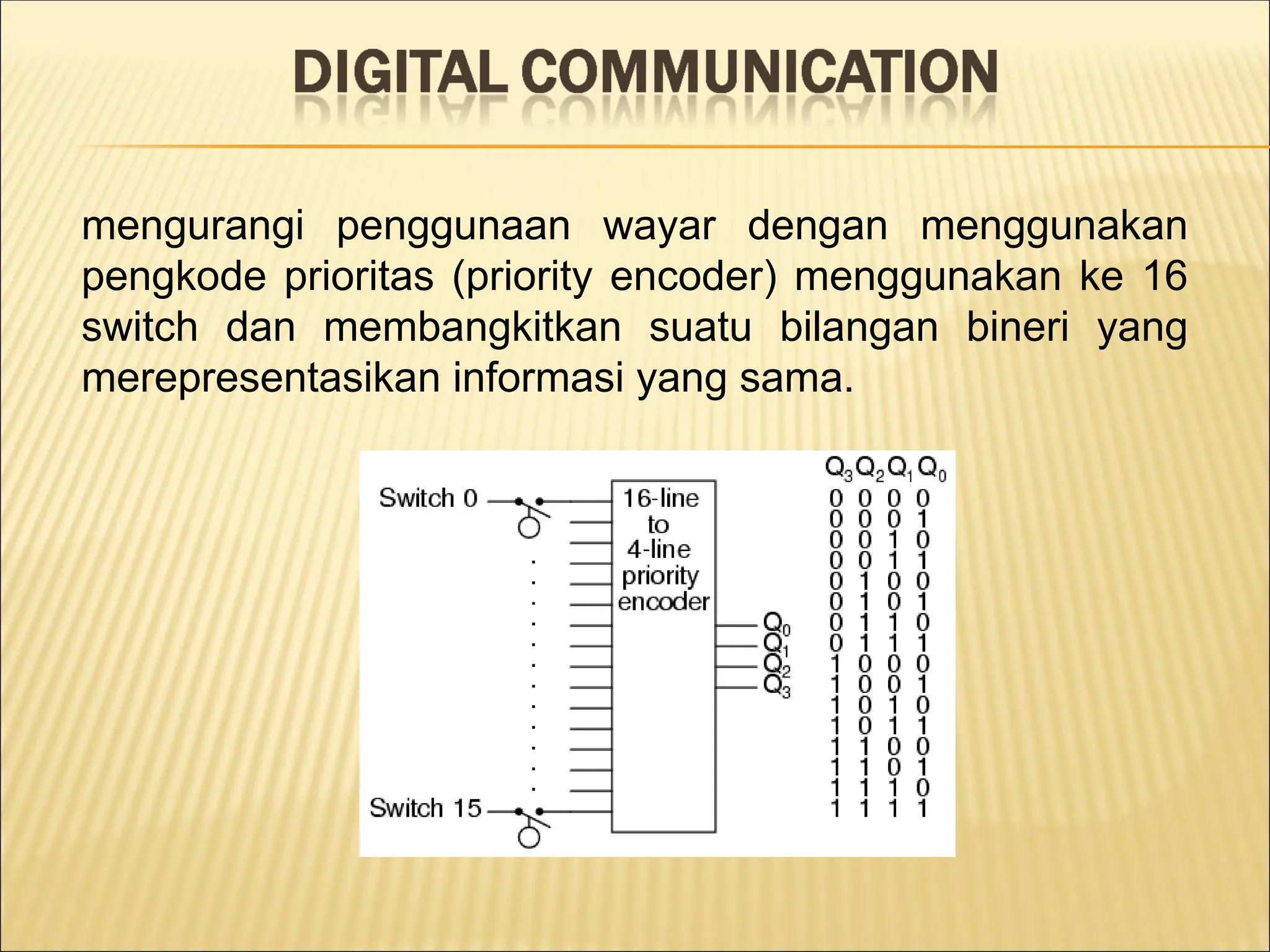
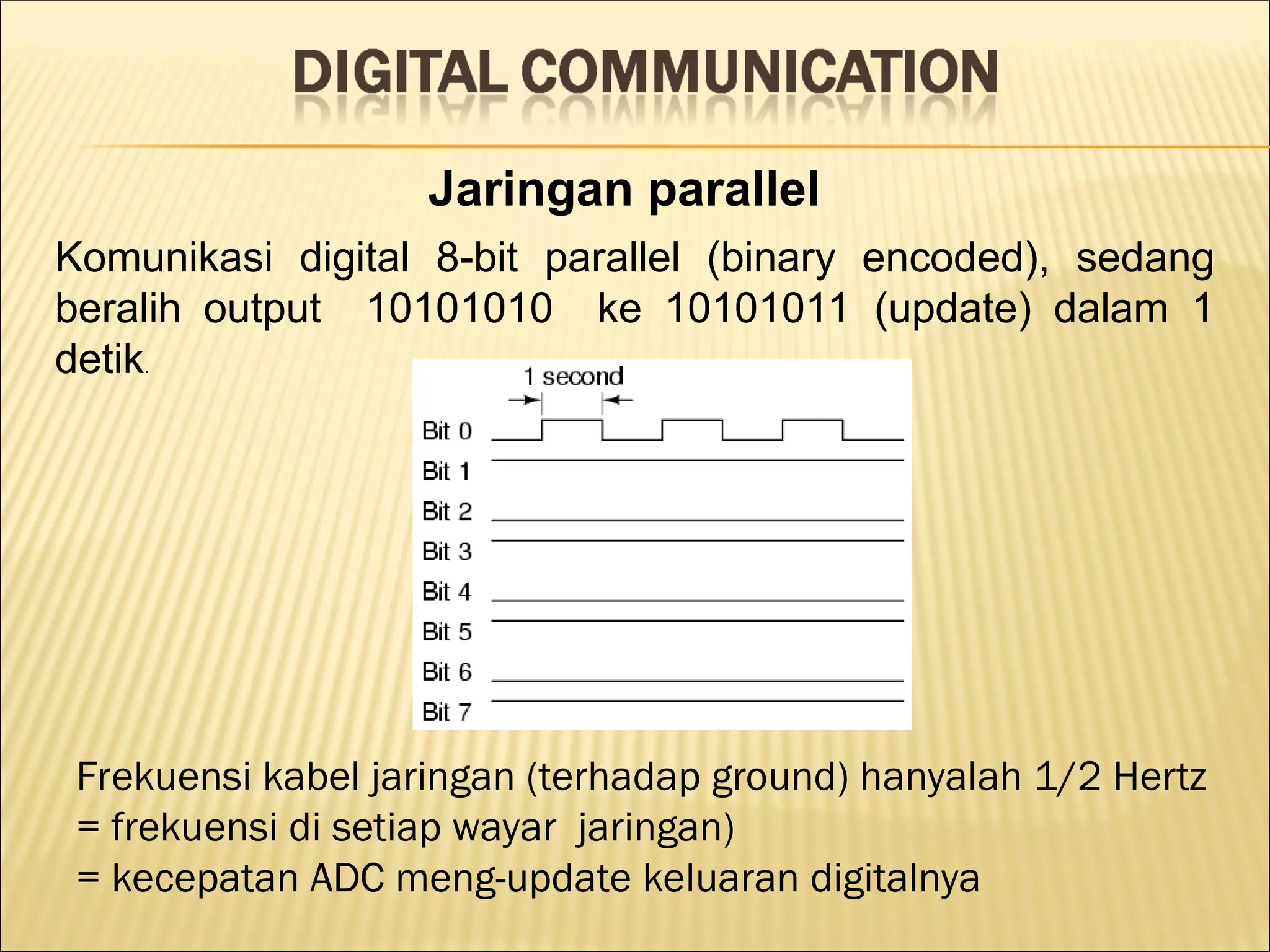
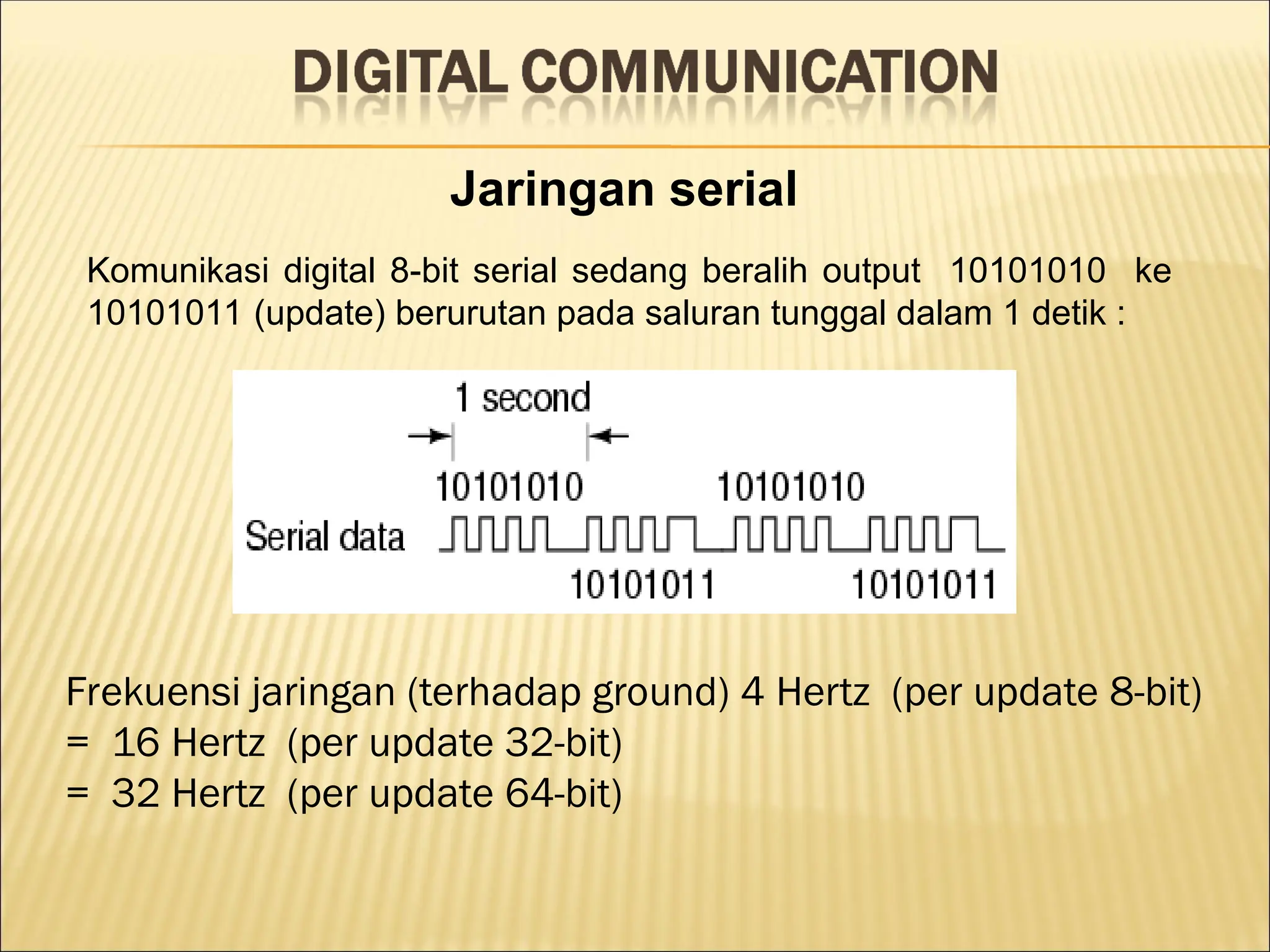
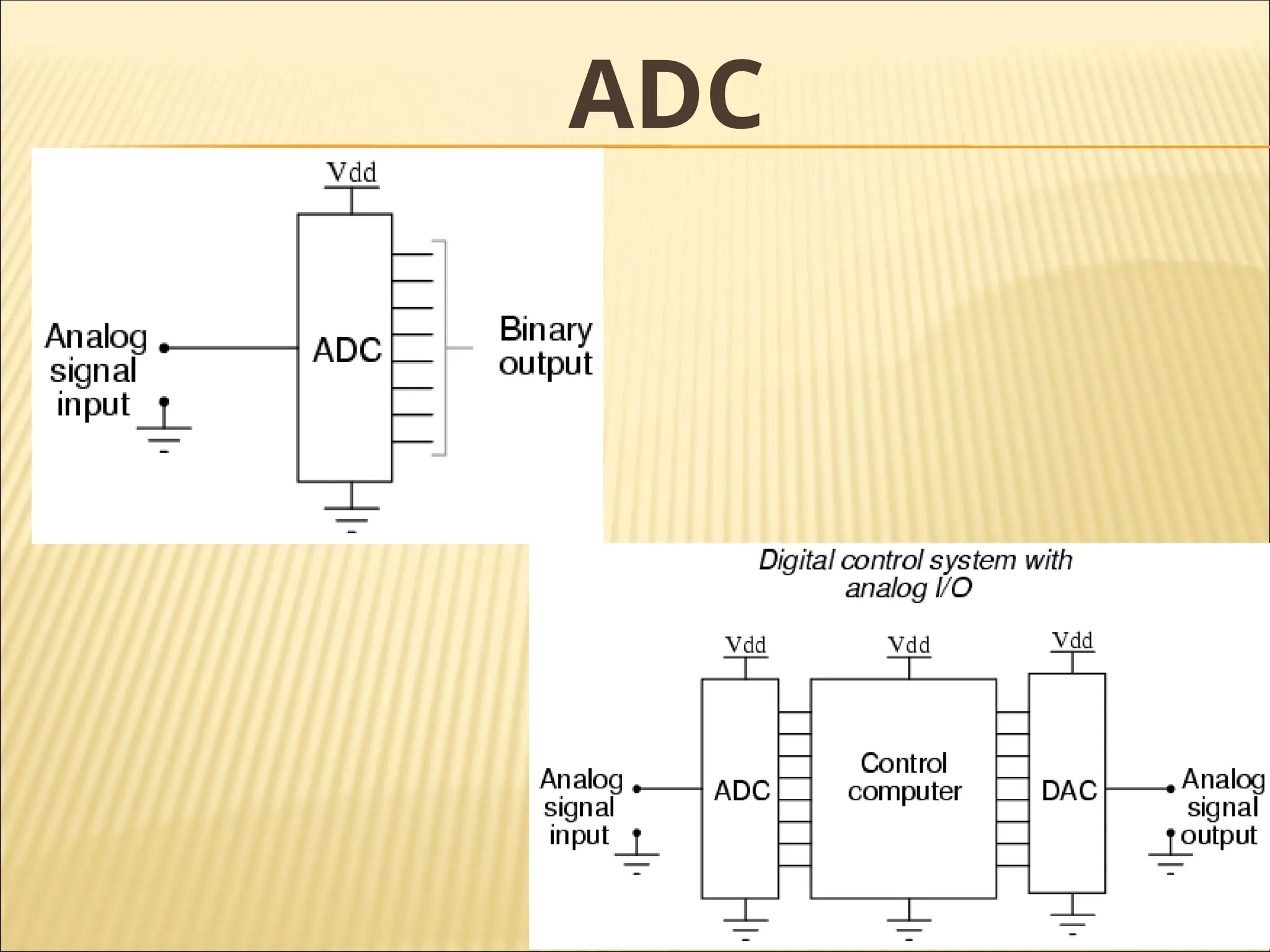
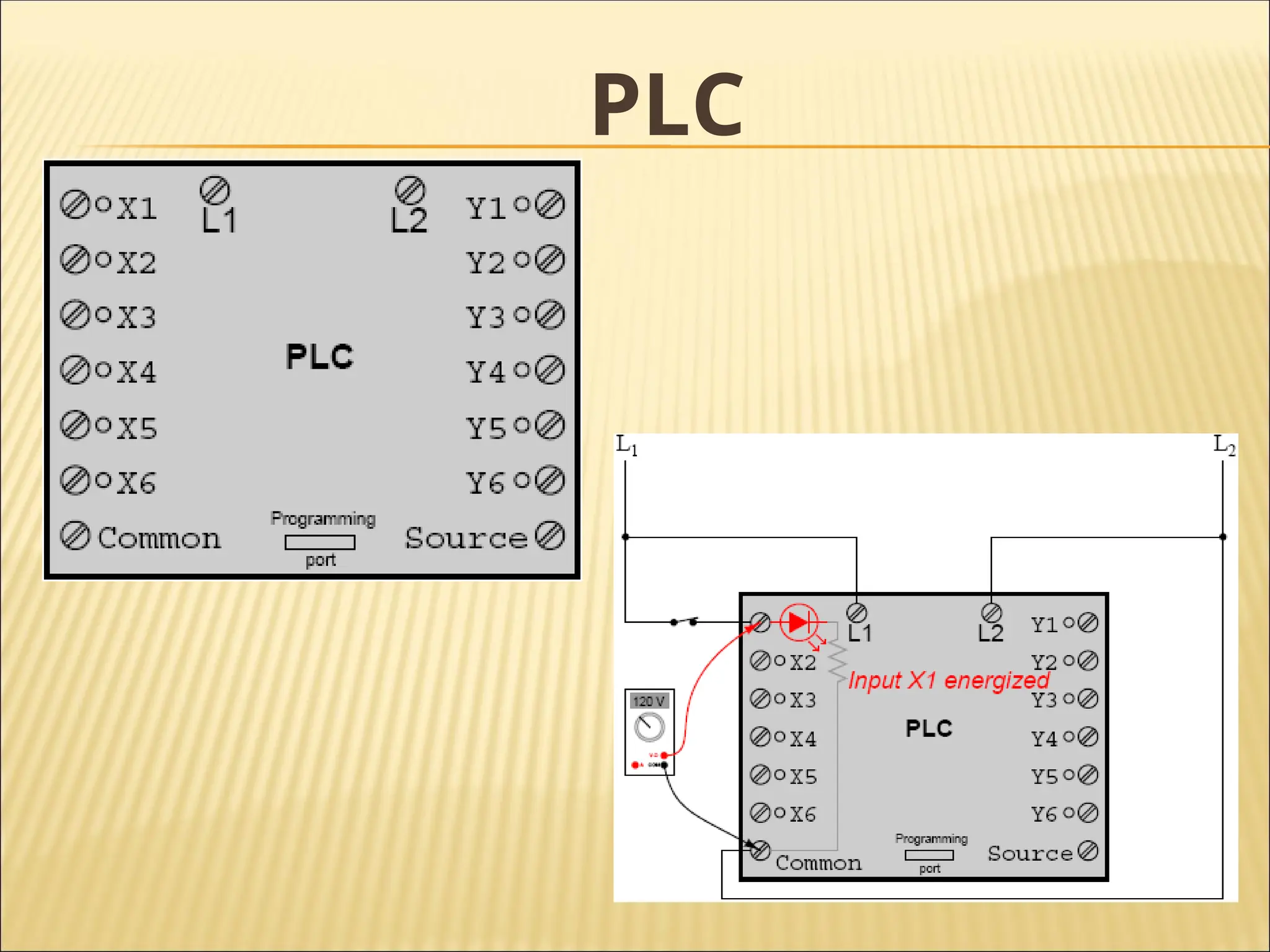
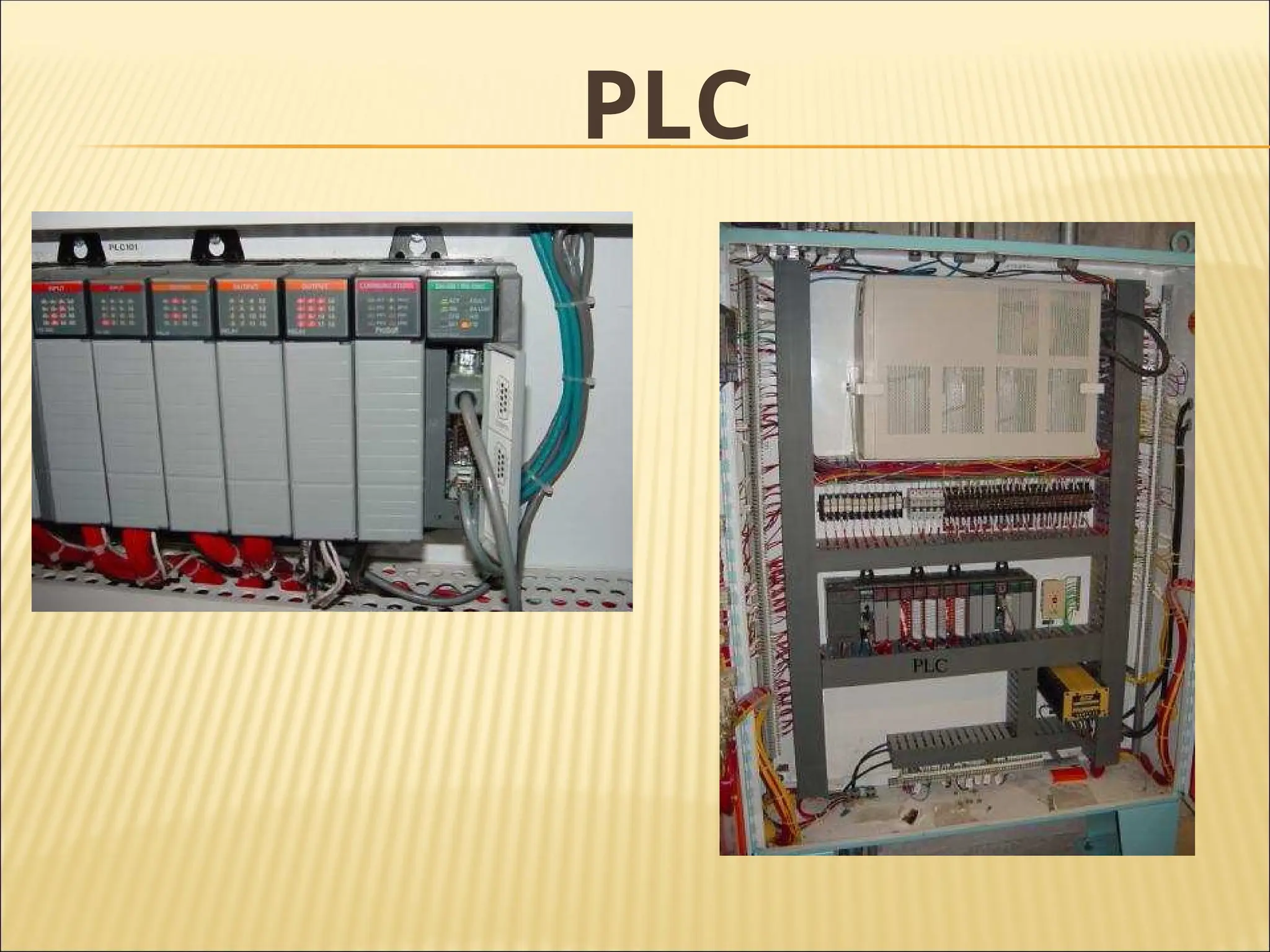
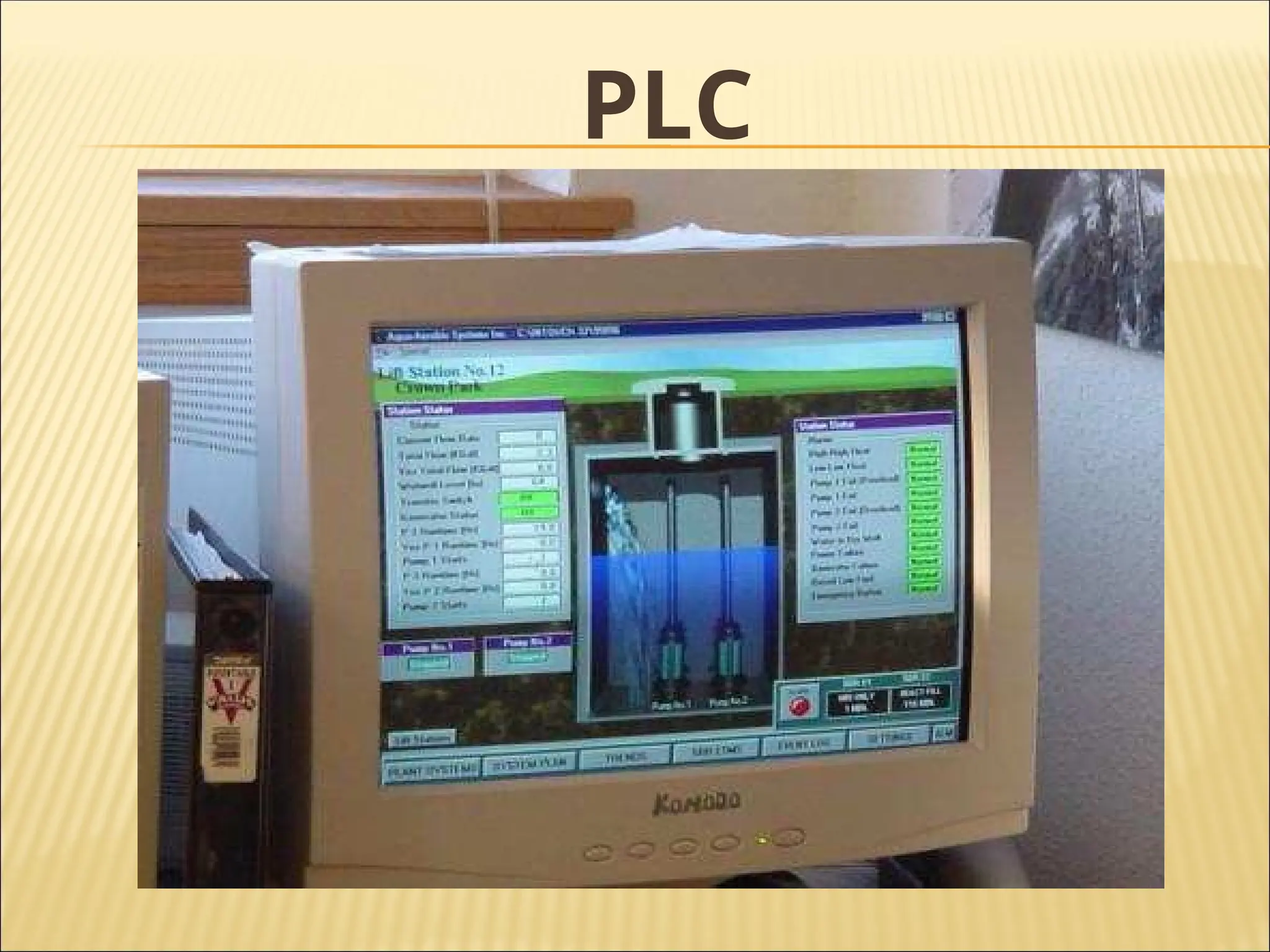
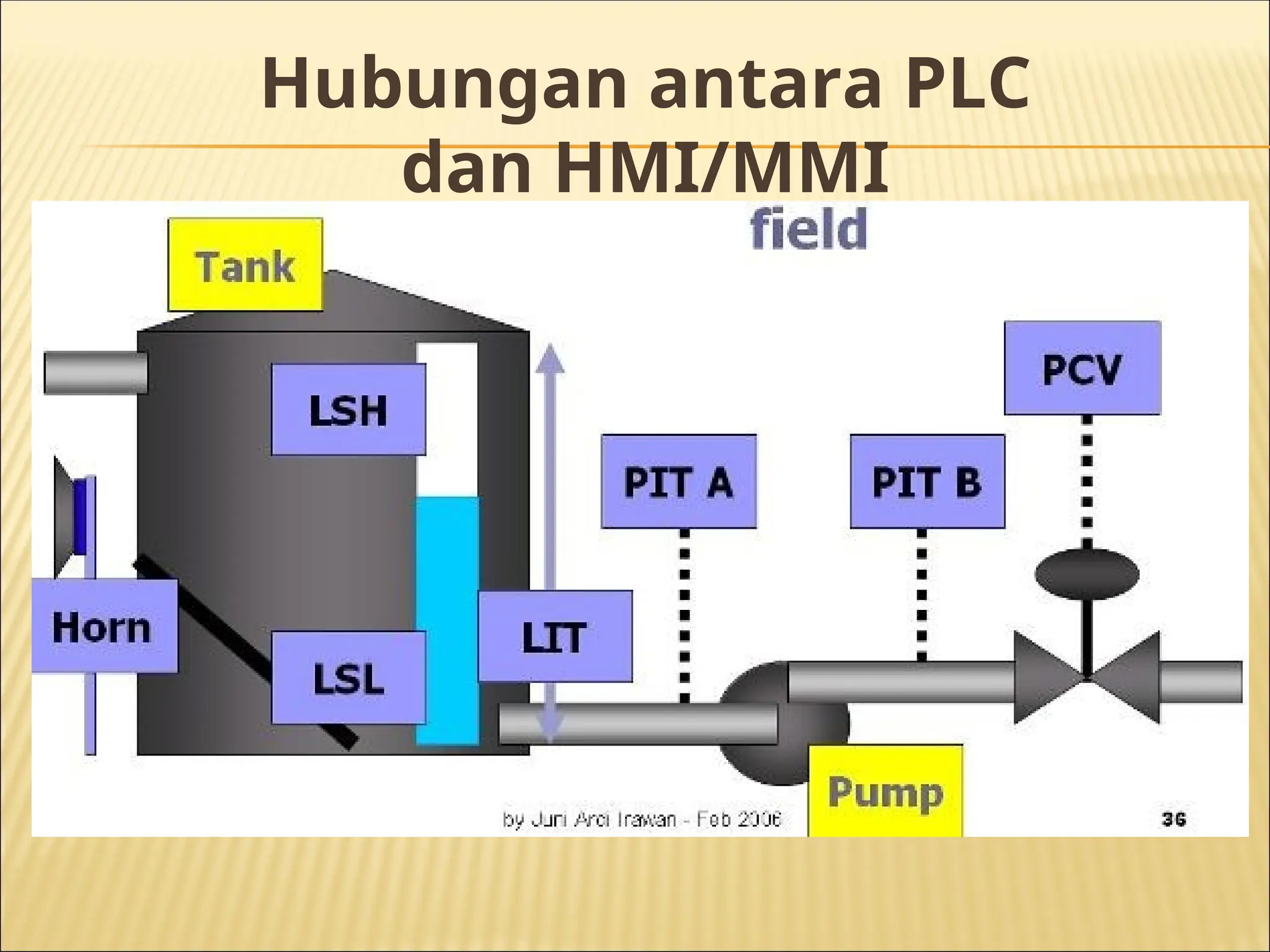
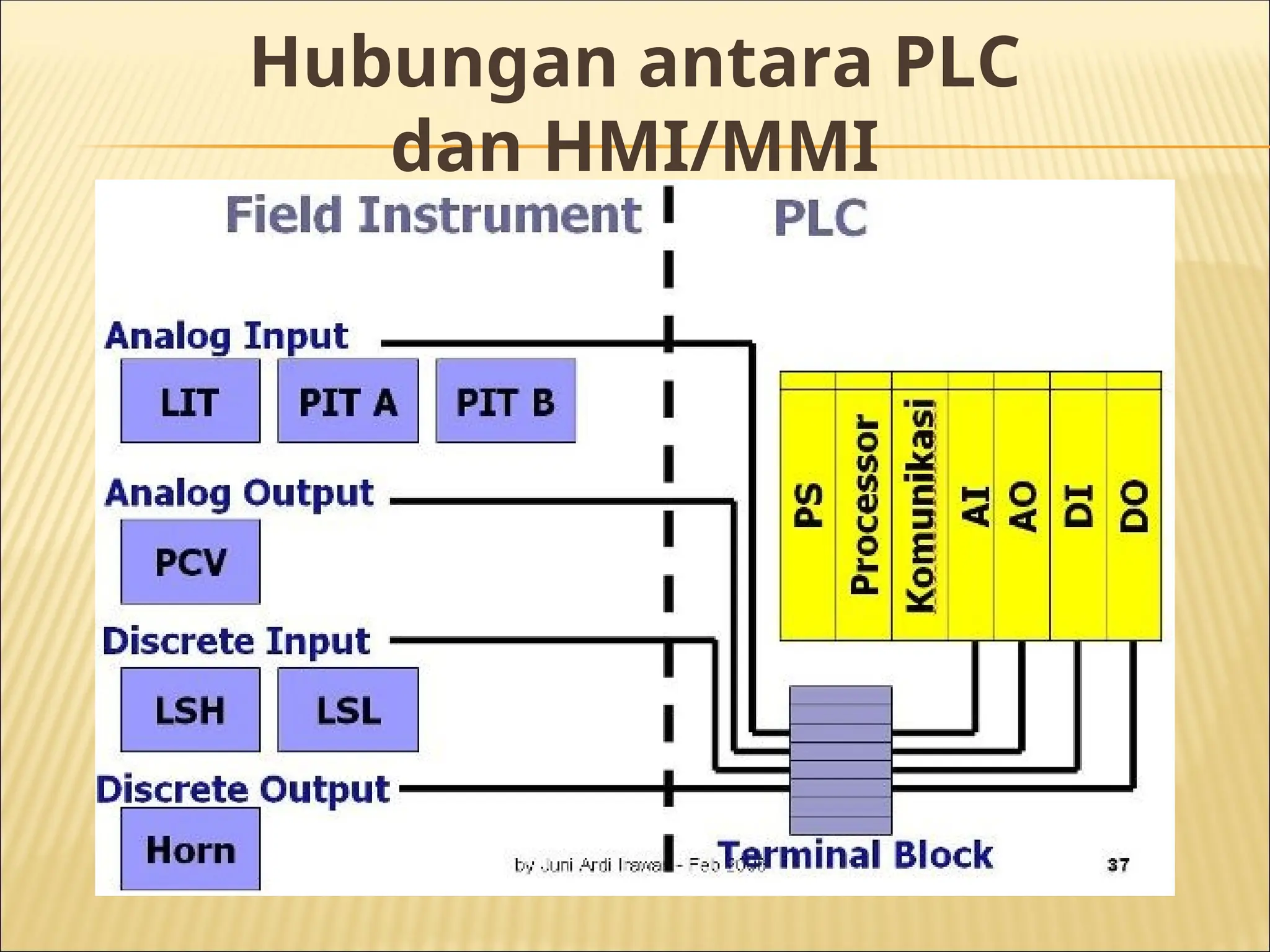
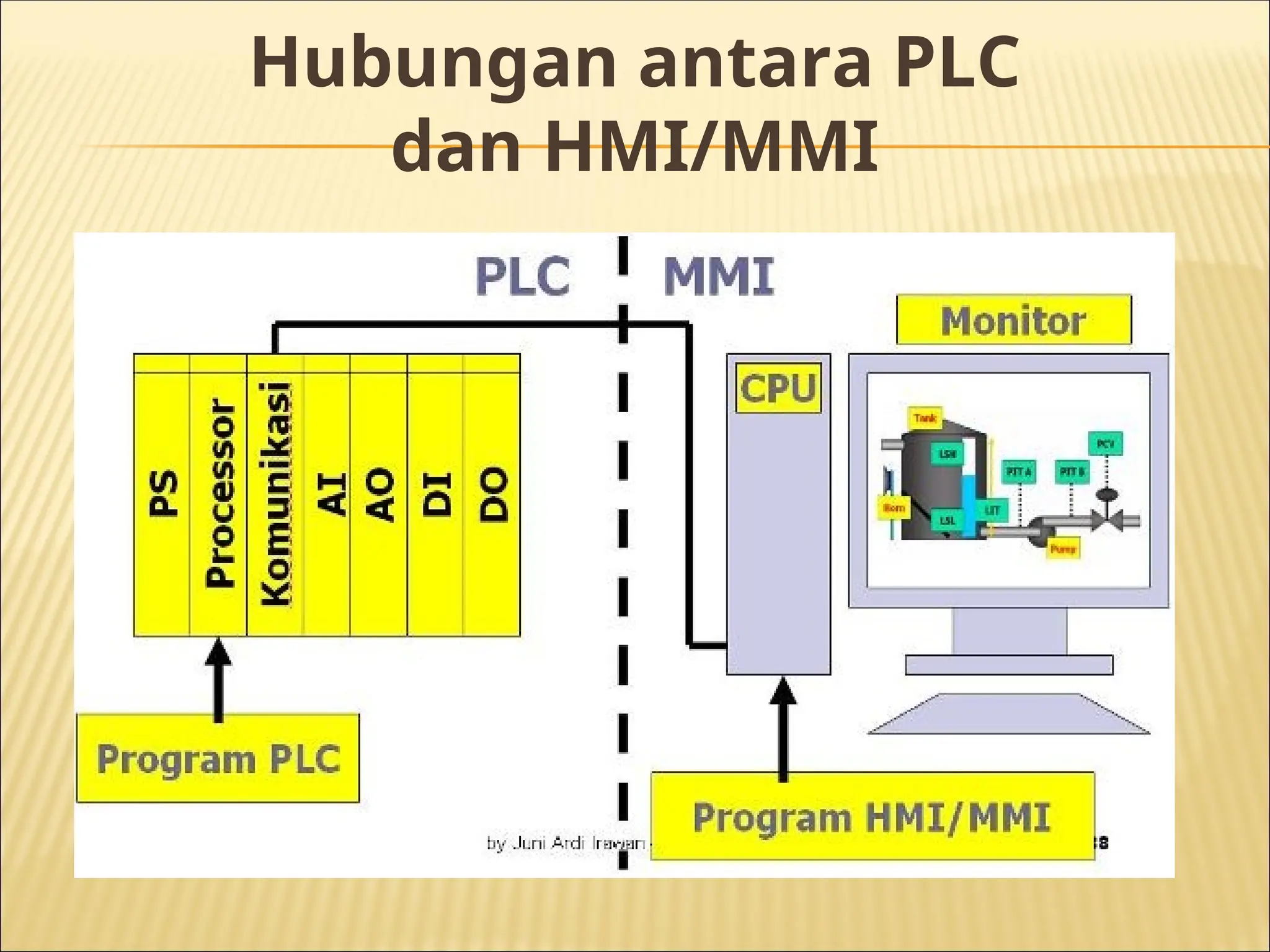
Dokumen ini membahas tentang instrumen dan kontrol dalam sistem otomatisasi, termasuk metode kontrol manual dan otomatis, serta elemen-elemen dalam loop kontrol. Diuraikan juga tentang berbagai jenis sensor dan aktuator, serta teknologi komunikasi digital dan analog dalam pengendalian proses industri. Selain itu, dokumen ini menjelaskan tentang pengontrol PID dan PLC, serta hubungan antara PLC dan HMI/MMI dalam sistem kontrol.

















![Dasar instrument [revisi]](https://cdn.slidesharecdn.com/ss_thumbnails/dasarinstrumentrevisi-180329092256-thumbnail.jpg?width=640&height=640&fit=bounds)