Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
FK
Uploaded by
Fukumoto Kanae
PDF, PPTX
864 views
BLEビーコンを所持する徘徊高齢者のパーティクルフィルタを用いた追跡手法の検討
BLEビーコンを所持する徘徊高齢者のパーティクルフィルタを用いた追跡手法の検討
Healthcare
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 17
2
/ 17
3
/ 17
4
/ 17
5
/ 17
6
/ 17
7
/ 17
8
/ 17
9
/ 17
10
/ 17
11
/ 17
12
/ 17
13
/ 17
14
/ 17
15
/ 17
16
/ 17
17
/ 17
More Related Content
PDF
確率的自己位置推定
by
Horiguchi Shuhei
PDF
Siftによる特徴点抽出
by
Masato Nakai
PDF
条件付き確率場の推論と学習
by
Masaki Saito
PDF
Yolo v1
by
Takuya Mouri
PDF
BlackBox モデルの説明性・解釈性技術の実装
by
Deep Learning Lab(ディープラーニング・ラボ)
PDF
R-CNNの原理とここ数年の流れ
by
Kazuki Motohashi
PDF
Deep Learning Lab 異常検知入門
by
Shohei Hido
PDF
Newman アルゴリズムによるソーシャルグラフのクラスタリング
by
Atsushi KOMIYA
確率的自己位置推定
by
Horiguchi Shuhei
Siftによる特徴点抽出
by
Masato Nakai
条件付き確率場の推論と学習
by
Masaki Saito
Yolo v1
by
Takuya Mouri
BlackBox モデルの説明性・解釈性技術の実装
by
Deep Learning Lab(ディープラーニング・ラボ)
R-CNNの原理とここ数年の流れ
by
Kazuki Motohashi
Deep Learning Lab 異常検知入門
by
Shohei Hido
Newman アルゴリズムによるソーシャルグラフのクラスタリング
by
Atsushi KOMIYA
What's hot
PDF
Unsupervised Anomaly Detection with Generative Adversarial Networks to Guide ...
by
harmonylab
PDF
ドメイン適応の原理と応用
by
Yoshitaka Ushiku
PDF
Cv20160205
by
Takanori Ogata
PDF
研究発表を準備する(2022年版)
by
Takayuki Itoh
PPTX
[DL輪読会]Learning convolutional neural networks for graphs
by
Deep Learning JP
PPTX
調波打撃音分離の時間周波数マスクを用いた線形ブラインド音源分離
by
Kitamura Laboratory
PDF
画像認識の初歩、SIFT,SURF特徴量
by
takaya imai
PPTX
遺伝的アルゴリズム・遺伝的プログラミング
by
MatsuiRyo
PDF
音源分離 ~DNN音源分離の基礎から最新技術まで~ Tokyo bishbash #3
by
Naoya Takahashi
PPTX
確率ロボティクス第五回
by
Ryuichi Ueda
PPTX
独立低ランク行列分析に基づくブラインド音源分離(Blind source separation based on independent low-rank...
by
Daichi Kitamura
PPTX
[DL輪読会]Graph R-CNN for Scene Graph Generation
by
Deep Learning JP
PDF
3次元レジストレーションの基礎とOpen3Dを用いた3次元点群処理
by
Toru Tamaki
PDF
ベイズ統計入門
by
Miyoshi Yuya
PDF
実践 Amazon Mechanical Turk ※下記の注意点をご覧ください(回答の質の悪化・報酬額の相場の変化・仕様変更)
by
Ayako_Hasegawa
PPTX
モデル高速化百選
by
Yusuke Uchida
PDF
グラフィカルモデル入門
by
Kawamoto_Kazuhiko
PDF
推薦アルゴリズムの今までとこれから
by
cyberagent
PPTX
[DL輪読会]End-to-End Object Detection with Transformers
by
Deep Learning JP
PPTX
深層学習の非常に簡単な説明
by
Seiichi Uchida
Unsupervised Anomaly Detection with Generative Adversarial Networks to Guide ...
by
harmonylab
ドメイン適応の原理と応用
by
Yoshitaka Ushiku
Cv20160205
by
Takanori Ogata
研究発表を準備する(2022年版)
by
Takayuki Itoh
[DL輪読会]Learning convolutional neural networks for graphs
by
Deep Learning JP
調波打撃音分離の時間周波数マスクを用いた線形ブラインド音源分離
by
Kitamura Laboratory
画像認識の初歩、SIFT,SURF特徴量
by
takaya imai
遺伝的アルゴリズム・遺伝的プログラミング
by
MatsuiRyo
音源分離 ~DNN音源分離の基礎から最新技術まで~ Tokyo bishbash #3
by
Naoya Takahashi
確率ロボティクス第五回
by
Ryuichi Ueda
独立低ランク行列分析に基づくブラインド音源分離(Blind source separation based on independent low-rank...
by
Daichi Kitamura
[DL輪読会]Graph R-CNN for Scene Graph Generation
by
Deep Learning JP
3次元レジストレーションの基礎とOpen3Dを用いた3次元点群処理
by
Toru Tamaki
ベイズ統計入門
by
Miyoshi Yuya
実践 Amazon Mechanical Turk ※下記の注意点をご覧ください(回答の質の悪化・報酬額の相場の変化・仕様変更)
by
Ayako_Hasegawa
モデル高速化百選
by
Yusuke Uchida
グラフィカルモデル入門
by
Kawamoto_Kazuhiko
推薦アルゴリズムの今までとこれから
by
cyberagent
[DL輪読会]End-to-End Object Detection with Transformers
by
Deep Learning JP
深層学習の非常に簡単な説明
by
Seiichi Uchida
Viewers also liked
PDF
Linked Open Data を用いた シビックテックプロジェクトの 透明性向上と協働促進
by
Shun Shiramatsu
PDF
社会課題とその解決目標のLOD化による公共圏での協働促進サービス
by
Shun Shiramatsu
PPTX
東海大会発表 0927
by
IchinoseShugo
PPTX
東海支部西田
by
nishida-srmtlab
PDF
徘徊高齢者捜索のための BLEビーコンの電波強度分布を用いた 位置推定手法
by
Shun Shiramatsu
PPTX
東海支部成瀬2
by
masatonaruse
Linked Open Data を用いた シビックテックプロジェクトの 透明性向上と協働促進
by
Shun Shiramatsu
社会課題とその解決目標のLOD化による公共圏での協働促進サービス
by
Shun Shiramatsu
東海大会発表 0927
by
IchinoseShugo
東海支部西田
by
nishida-srmtlab
徘徊高齢者捜索のための BLEビーコンの電波強度分布を用いた 位置推定手法
by
Shun Shiramatsu
東海支部成瀬2
by
masatonaruse
BLEビーコンを所持する徘徊高齢者のパーティクルフィルタを用いた追跡手法の検討
1.
BLEビーコンを所持する徘徊⾼齢者の パーティクルフィルタを⽤いた 追跡⼿法の検討 福本 加奈恵, ⽩松
俊, 岩⽥ 彰(名古屋⼯業⼤学)
2.
はじめに:背景と⽬的 背景: ⾼齢化による認知症⾼齢者の増加 2025年には国内⾼齢者の5⼈に1⼈,700万⼈が認知症 徘徊⾏動を⾒守るためのアプリ「⾒守りプラス」[永井 16] 徘徊⾼齢者にBLE(Bluetooth
Low Energy)ビーコンを持たせ, スマートフォンを所持した捜索者が探す Ø BLEはGPSよりも⼩型で消費電⼒が少なく,電池1つで約1年動作 詳細な位置推定はせずビーコンを検出したことのみを通知 Ø ⾯識のないボランティアによる捜索時は声掛けの対象が絞れない ⽬的: 声掛けの⼿がかりとなる位置推定精度の実現 [永井 16] 永井, クグレ, 岩⽥: BLE発信機とスマートフォンを⽤いた⾼齢者⾒守り機構の開発. 研究報告⾼齢社会デザイン(ASD), 2016-ASD-4(1), 2016. ⾒守り袋 の画像
3.
従来⼿法 ⽩松らの⼿法[⽩松 16]では、⾼齢者は移動していないと仮定 BLEビーコン(発信機)とスマートフォン(受信機)は各1つずつ 探索者の移動につれて多地点で電波強度(RSSI値)を計測 事前確率分布に基づいて多地点の計測結果を確率的に統合 [⽩松 16]
⽩松 他:徘徊⾼齢者捜査のためのBLEビーコンの電波強度分布を⽤いた位置推定⼿法, IPSJ SJG-ASD, 2016-ASD-4(2), 2016.
4.
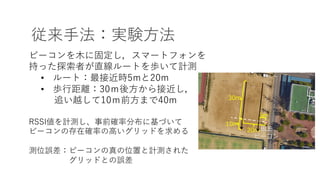
従来⼿法:実験⽅法 ビーコンを⽊に固定し,スマートフォンを 持った探索者が直線ルートを歩いて計測 • ルート:最接近時5mと20m • 歩⾏距離:30m後⽅から接近し, 追い越して10m前⽅まで40m RSSI値を計測し、事前確率分布に基づいて ビーコンの存在確率の⾼いグリッドを求める 測位誤差:ビーコンの真の位置と計測された グリッドとの誤差 BLE ビーコン 30m 10m 20m 5m
5.
従来⼿法:実験結果 10m 20m 30m(最接近時)
40m(通過) 上位2グリッド(0.5m2) 18.36m 28.21m 18.35m 13.91m 上位10グリッド(2.5m2) 14.55m 24.27m 12.38m 10.32m 上位20グリッド(5m2) 13.15m 21.01m 7.76m 7.93m ⽐較⼿法(交点の重⼼) 32.86m 28.30m 25.65m 23.72m 10m 20m 30m(最接近時) 40m(通過) 上位2グリッド(0.5m2) 32.58m 32.13m 15.26m 8.07m 上位10グリッド(2.5m2) 29.78m 29.78m 14.28m 6.21m 上位20グリッド(5m2) 29.17m 25.29m 12.41m 5.79m ⽐較⼿法(交点の重⼼) 21.20m 17.74m 14.18m 11.47m ルートA(最接近時の距離5m)を歩⾏した時の測位誤差 ルートB(最接近時の距離20m)を歩⾏した時の測位誤差
6.
従来⼿法:考察 追い越した後に5〜10m程度の測位誤差 最接近時に7〜12m程度の測位誤差 ⼀回に⾒渡せる範囲に⾼齢者が存在すると考えられる 声掛けの⼿がかりになり得ると⽰唆
7.
従来⼿法の問題点 探索対象の徘徊⾼齢者が⽌まっていると仮定している ため、 ⾼齢者が移動している場合の探索が困難 ⾼齢者が等速直線運動をしていると仮定し パーティクルフィルタを⽤いた位置推定を⾏う
8.
パーティクルフィルタとは 逐次追跡可能なアルゴリズム ①リサンプリング ②予測 ③重み付け(観測) ④状態推定 を繰り返すことで物体を追跡する⼿法 パーティクルフィルタの概略図[松村08] [松村 08] 松村
他:パーティクルフィルタを⽤いた進⼊検出と物体追跡,2008
9.
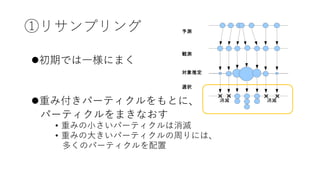
①リサンプリング l初期では⼀様にまく l重み付きパーティクルをもとに、 パーティクルをまきなおす • 重みの⼩さいパーティクルは消滅 • 重みの⼤きいパーティクルの周りには、 多くのパーティクルを配置
10.
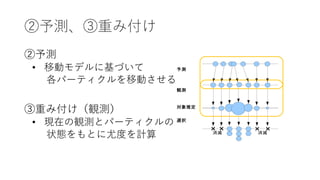
②予測、③重み付け ②予測 • 移動モデルに基づいて 各パーティクルを移動させる ③重み付け(観測) • 現在の観測とパーティクルの 状態をもとに尤度を計算
11.
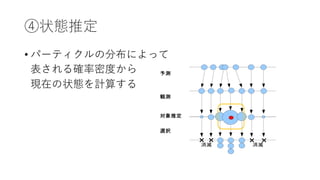
④状態推定 • パーティクルの分布によって 表される確率密度から 現在の状態を計算する
12.
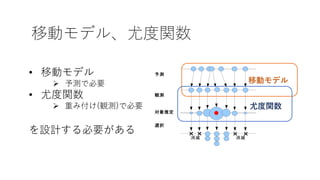
移動モデル、尤度関数 • 移動モデル Ø 予測で必要 •
尤度関数 Ø 重み付け(観測)で必要 を設計する必要がある 移動モデル 尤度関数
13.
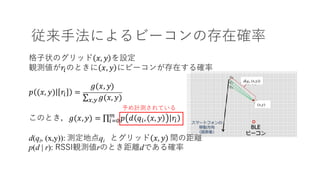
従来⼿法によるビーコンの存在確率 格⼦状のグリッド 𝑥, 𝑦
を設定 観測値が𝑟%のときに 𝑥, 𝑦 にビーコンが存在する確率 𝑝 (𝑥, 𝑦) 𝑟% = 𝑔(𝑥, 𝑦) ∑ 𝑔(𝑥, 𝑦)-,. このとき,𝑔(𝑥, 𝑦) = ∏ 𝑝 𝑑 𝑞%,(𝑥, 𝑦 𝑟% 2 %34 d(qi, (x,y)): 測定地点qi とグリッド 𝑥, 𝑦 間の距離 p(d | r): RSSI観測値rのとき距離dである確率 d(qi, (x,y)) (x,y) 予め計測されている
14.
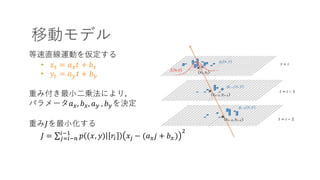
移動モデル 等速直線運動を仮定する • 𝑥5 =
𝑎- 𝑡 + 𝑏- • 𝑦5 = 𝑎. 𝑡 + 𝑏. 重み付き最⼩⼆乗法により, パラメータ𝑎-, 𝑏-, 𝑎. , 𝑏.を決定 重み𝐽を最⼩化する 𝐽 = ∑ 𝑝 (𝑥, 𝑦) 𝑟% 𝑥; − (𝑎- 𝑗 + 𝑏-) >%?@ ;3%?A
15.
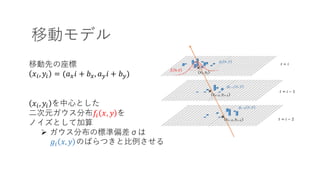
移動モデル 移動先の座標 𝑥%, 𝑦% =
(𝑎- 𝑖 + 𝑏-, 𝑎. 𝑖 + 𝑏.) 𝑥%, 𝑦% を中⼼とした ⼆次元ガウス分布𝑓% 𝑥, 𝑦 を ノイズとして加算 Ø ガウス分布の標準偏差σは 𝑔% 𝑥, 𝑦 のばらつきと⽐例させる
16.
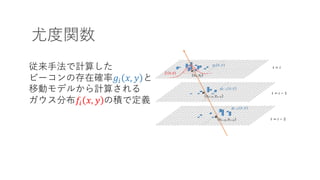
尤度関数 従来⼿法で計算した ビーコンの存在確率𝑔% 𝑥, 𝑦
と 移動モデルから計算される ガウス分布𝑓% 𝑥, 𝑦 の積で定義
17.
まとめ、今後の展望 まとめ • パーティクルフィルタにより移動を考慮した追跡⼿法を検討した 今後の展望 • OpenCVのソースコードを基に,尤度関数と移動モデルの部分を書 き換えて実装 •
iPhone端末上で動作するようにし,測位精度を計測する実験を⾏う • 存在確率の⾼いグリッドの分布を地図上に可視化する予定 • 声のかけ⽅に関するマニュアル的情報提供 Ø 認知症のお年寄りは、うまく声をかけないとパニックになったりすることも ある
Download

![はじめに:背景と⽬的
背景: ⾼齢化による認知症⾼齢者の増加
2025年には国内⾼齢者の5⼈に1⼈,700万⼈が認知症
徘徊⾏動を⾒守るためのアプリ「⾒守りプラス」[永井 16]
徘徊⾼齢者にBLE(Bluetooth Low Energy)ビーコンを持たせ,
スマートフォンを所持した捜索者が探す
Ø BLEはGPSよりも⼩型で消費電⼒が少なく,電池1つで約1年動作
詳細な位置推定はせずビーコンを検出したことのみを通知
Ø ⾯識のないボランティアによる捜索時は声掛けの対象が絞れない
⽬的: 声掛けの⼿がかりとなる位置推定精度の実現
[永井 16] 永井, クグレ, 岩⽥: BLE発信機とスマートフォンを⽤いた⾼齢者⾒守り機構の開発.
研究報告⾼齢社会デザイン(ASD), 2016-ASD-4(1), 2016.
⾒守り袋
の画像](https://image.slidesharecdn.com/tokai-fukumoto-161012033040/85/BLE-2-320.jpg)
![従来⼿法
⽩松らの⼿法[⽩松 16]では、⾼齢者は移動していないと仮定
BLEビーコン(発信機)とスマートフォン(受信機)は各1つずつ
探索者の移動につれて多地点で電波強度(RSSI値)を計測
事前確率分布に基づいて多地点の計測結果を確率的に統合
[⽩松 16] ⽩松 他:徘徊⾼齢者捜査のためのBLEビーコンの電波強度分布を⽤いた位置推定⼿法,
IPSJ SJG-ASD, 2016-ASD-4(2), 2016.](https://image.slidesharecdn.com/tokai-fukumoto-161012033040/85/BLE-3-320.jpg)

![パーティクルフィルタとは
逐次追跡可能なアルゴリズム
①リサンプリング
②予測
③重み付け(観測)
④状態推定
を繰り返すことで物体を追跡する⼿法
パーティクルフィルタの概略図[松村08]
[松村 08] 松村 他:パーティクルフィルタを⽤いた進⼊検出と物体追跡,2008](https://image.slidesharecdn.com/tokai-fukumoto-161012033040/85/BLE-8-320.jpg)











![[DL輪読会]Learning convolutional neural networks for graphs](https://cdn.slidesharecdn.com/ss_thumbnails/learningconvolutionalneuralnetworksforgraphs-170222032121-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]Graph R-CNN for Scene Graph Generation](https://cdn.slidesharecdn.com/ss_thumbnails/graphr-cnnforscenegraphgenerationkobayashi1130-181130001547-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]End-to-End Object Detection with Transformers](https://cdn.slidesharecdn.com/ss_thumbnails/200529dlseminardetr-200529061512-thumbnail.jpg?width=640&height=640&fit=bounds)






