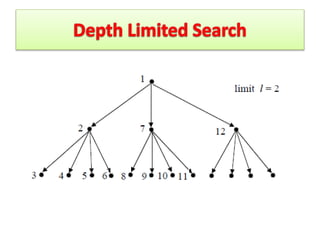
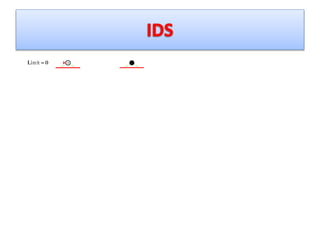
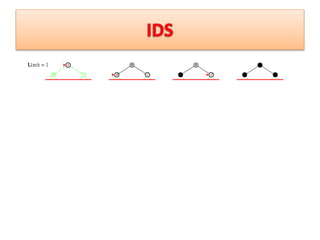
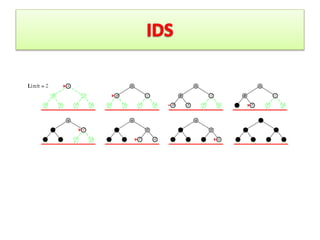
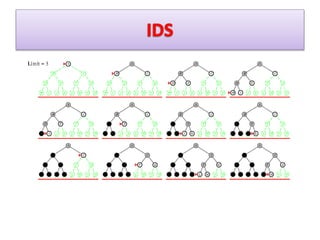
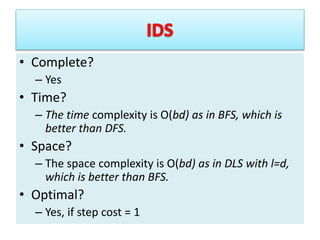
DLS limits the depth of a DFS search to guarantee termination. If a goal state exists at a depth less than L, DLS will find it but not necessarily an optimal path. The space complexity is O(bl) and time is O(bl). IDS improves on DLS by repeatedly running DLS with increasing depth limits, making it complete, optimal, and with better time (O(bd)) and space (O(bd)) complexities than plain DFS or BFS.