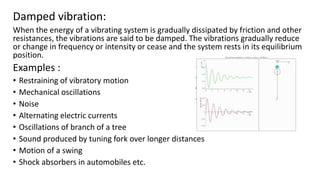
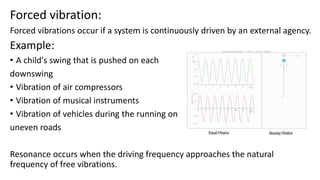
This document provides an overview of wave motion and simple harmonic motion, including definitions and equations. It discusses the characteristics of simple harmonic motion and provides the equation of motion. It also summarizes the phase relationships between displacement, velocity, and acceleration for particles executing simple harmonic motion. Additionally, it examines the vibrations of a cantilever beam as an example of simple harmonic motion, deriving the equation of motion and expressions for angular frequency and time period. Finally, it briefly defines damped vibration and forced vibration.
![SUBJECT: APPLIED PHYSICS – II [BS104]
UNIT – 1 : Wave Motion And It’s Applications
(Part – 1)
1ST YEAR 2ND SEMESTER
ANINDITA CHATTOPADHYAY
(LECTURER) PHYSICS
SHREE RAMKRISHNA INSTITUTE
OF SCIENCE AND TECHNOLOGY](https://image.slidesharecdn.com/apiiunit1part1-230815140933-a2b54eee/85/APII_Unit1_part1-pptx-1-320.jpg)
![SUBJECT: APPLIED PHYSICS – II [BS104]
UNIT – 1 : Wave Motion And It’s Applications
(Part – 1)
1ST YEAR 2ND SEMESTER
ANINDITA CHATTOPADHYAY
(LECTURER) PHYSICS
SHREE RAMKRISHNA INSTITUTE
OF SCIENCE AND TECHNOLOGY](https://image.slidesharecdn.com/apiiunit1part1-230815140933-a2b54eee/75/APII_Unit1_part1-pptx-1-2048.jpg)
![Characteristics of SHM:
•Motion is linear
•Motion is periodic
•Motion is oscillatory
•Restoring force is proportional to the
displacement from mean position [i.e. F ∞ y ]
•Restoring force is directed towards the mean
position. [ i.e. F ∞ - y ]](https://image.slidesharecdn.com/apiiunit1part1-230815140933-a2b54eee/85/APII_Unit1_part1-pptx-3-320.jpg)
![If y = A sin(ωt+φ) …(1)
be the equation of a SHM, then,
• y = displacement [unit : m or cm]
• A= amplitude [unit : m or cm]
• ω= angular frequency =2πn, where n= linear frequency [unit : s-1]
• T= time period = 1/n = 2π/ω [unit : s]
• ωt+φ = phase [unitless]
• φ = epoch [unitless]](https://image.slidesharecdn.com/apiiunit1part1-230815140933-a2b54eee/85/APII_Unit1_part1-pptx-6-320.jpg)
![• Equation of motion (EOM) of SHM:
According to the nature of restoring force,
F = -sy …(2)
→ 𝑚
𝑑2𝑦
𝑑𝑡2 = -sy
→
𝑑2𝑦
𝑑𝑡2 + 𝜔2
𝑦 = 0 …(3)
This is the equation of motion of SHM.
Here s = force constant [unit : N/m]
𝜔 =
𝑠
𝑚
= angular frequency
𝑇 =
2𝜋
ω
= time period of oscillation](https://image.slidesharecdn.com/apiiunit1part1-230815140933-a2b54eee/85/APII_Unit1_part1-pptx-7-320.jpg)

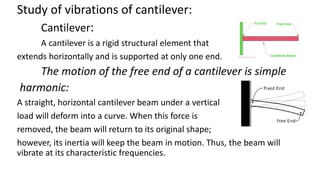
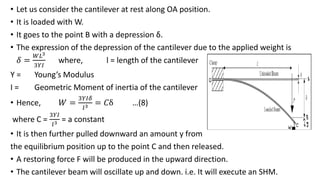
![EOM of the cantilever:
The forces acting on the loaded cantilever :
1. The weight hanged (downward) [W]
2. The restoring force in the opposite direction of the depression (upward)
[F]
The displacement of the tip of the cantilever :
1. Due to the weight (W) hanged δ
2. Due to the applied force (F) on the tip of the
cantilever y
Hence, 𝑊 − 𝐹 = 𝐶(𝛿 + 𝑦) … (9)
Putting (9) in (8) we get, 𝐶𝛿 − 𝐹 = 𝐶𝛿 + 𝑦
→ 𝐹 = −𝐶𝑦 … (10)
→𝐹 ∞ − 𝑦
Hence, The motion of the free end of a cantilever is simple harmonic.](https://image.slidesharecdn.com/apiiunit1part1-230815140933-a2b54eee/85/APII_Unit1_part1-pptx-13-320.jpg)
![From equation (10) we get,
→𝑚
𝑑2𝑦
𝑑𝑡2 = -Cy
→
𝑑2𝑦
𝑑𝑡2 +
𝐶
𝑚
𝑦 = 0 …(11)
Hence, comparing the EOM of a SHM i.e. equation (3) we get for the motion of
the end of a cantilever has the
angular frequency =𝜔 =
𝐶
𝑚
=
3𝑌𝐼
𝑙3 𝑚
[Using (8)]
linear frequency = n =
ω
2𝜋
=
1
2𝜋
3𝑌𝐼
𝑙3 𝑚
[Using (8)]
time period of oscillation = 𝑇 =
2𝜋
ω
= 2𝜋
𝑚𝑙3
3𝑌𝐼
[Using (8)]](https://image.slidesharecdn.com/apiiunit1part1-230815140933-a2b54eee/85/APII_Unit1_part1-pptx-14-320.jpg)