Downloaded 29 times





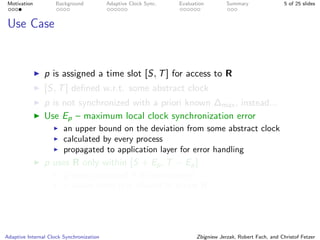

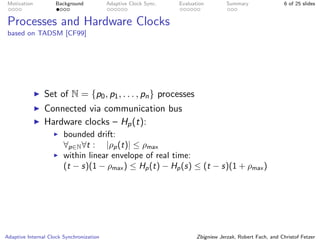
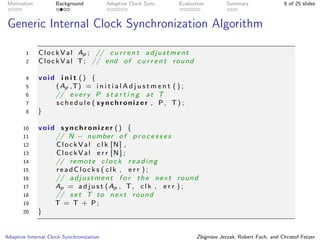
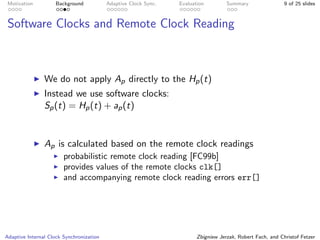

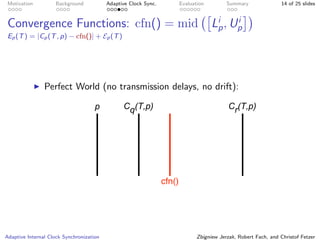
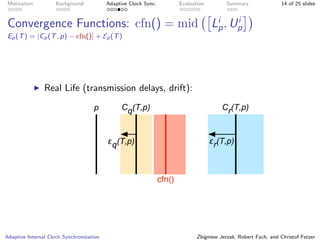
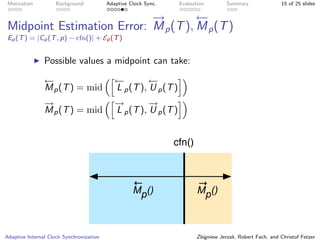
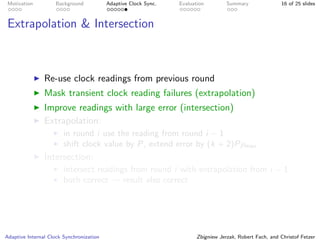



The document discusses adaptive internal clock synchronization, presenting a new algorithm to create safer distributed systems by relaxing assumptions on internal clock synchronization. It critiques current methods that assume a bounded deviation, highlighting their inflexibility and failure-proneness in real-time applications with dropped or delayed messages. The proposed approach eliminates upper bounds on deviation, enabling real-time adaptations of system behavior while masking process crashes, leading to a more reliable system.