Downloaded 16 times


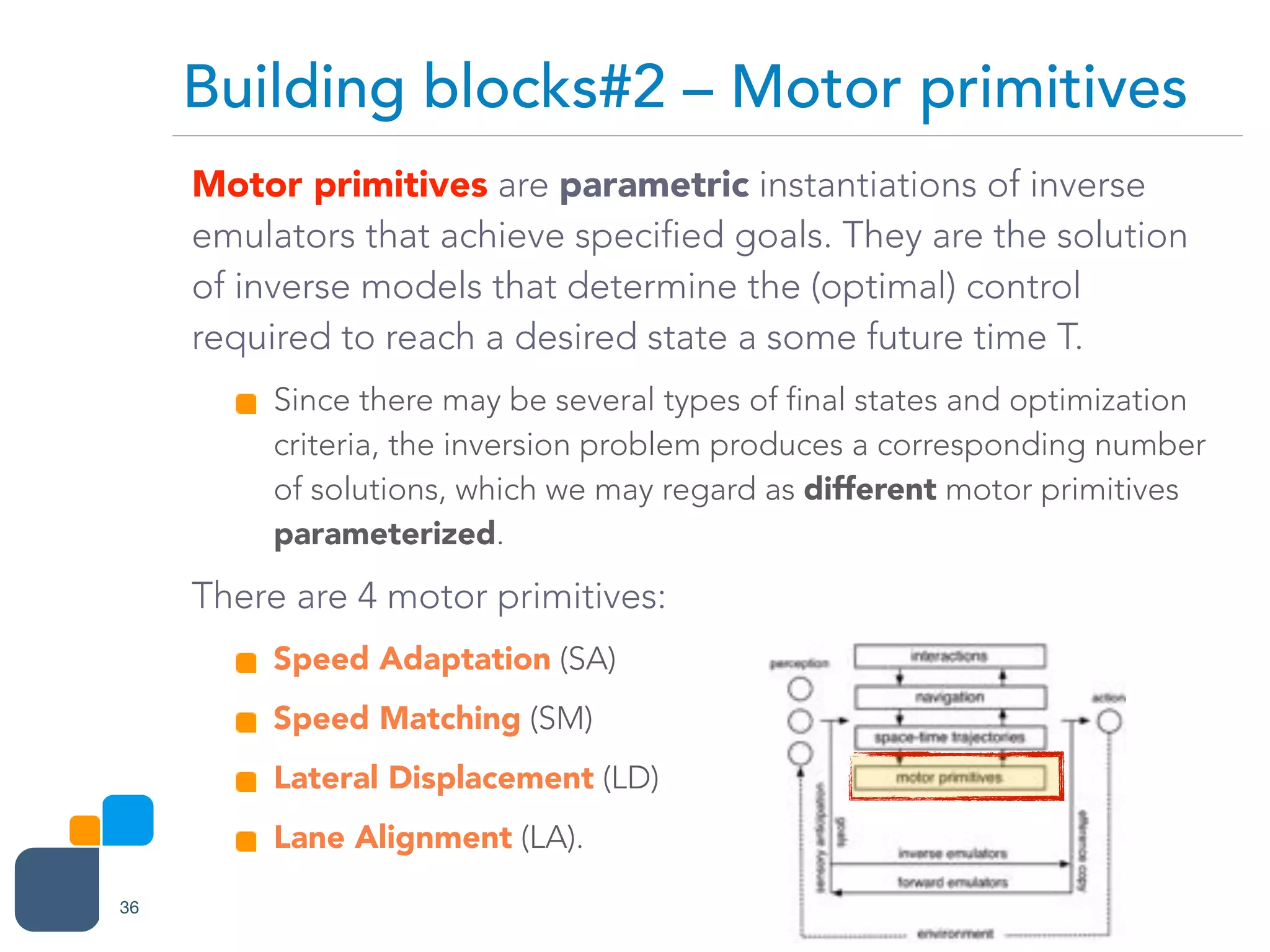
![Motor primitives
37
Example for longitudinal dynamics #1
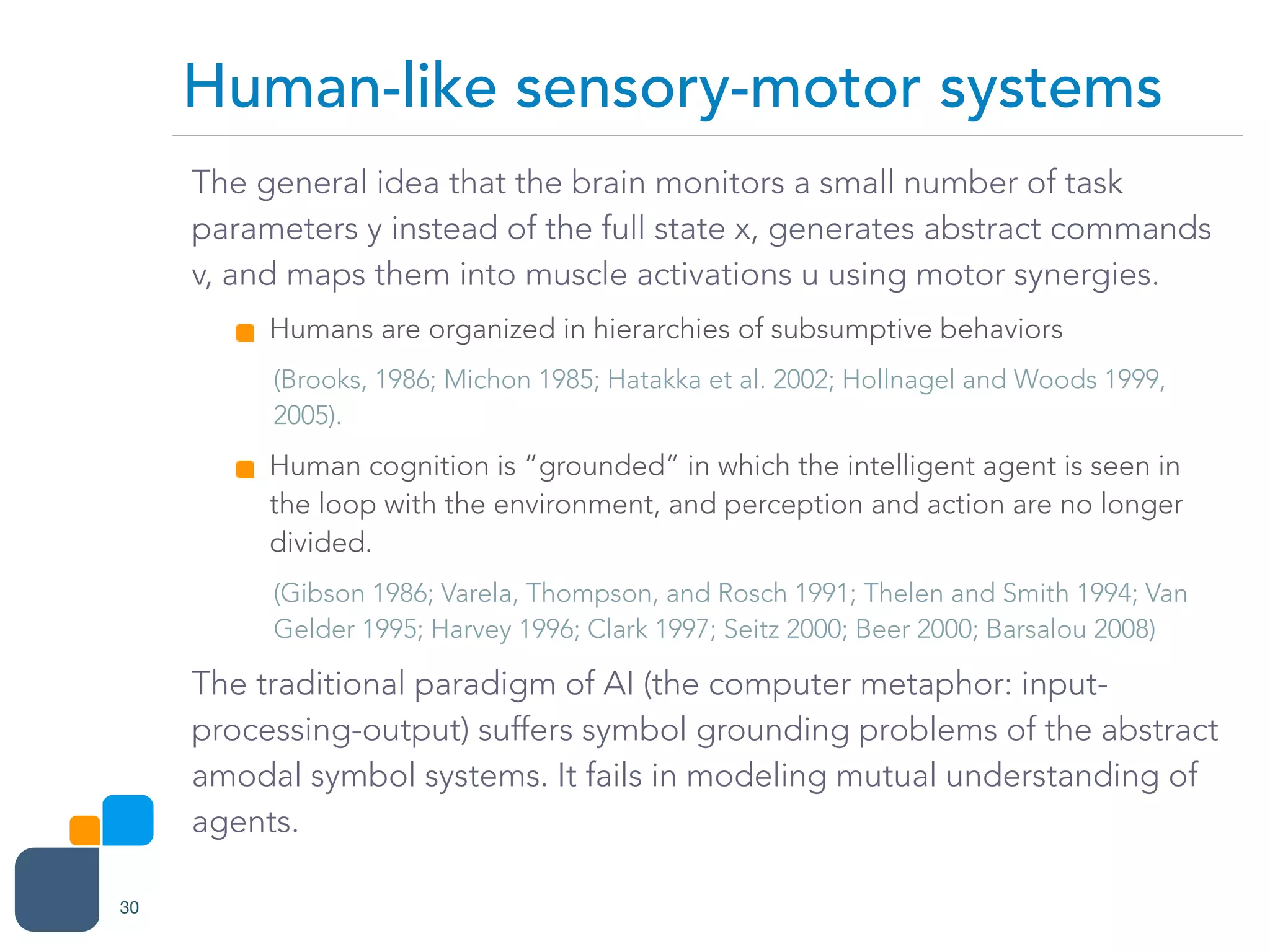
Optimal control formulation with some simplifications
d
dt
s(t) = u(t)
d
dt
u(t) =
1
Me
fx(p(t), u(t)) k0 kvu(t)2
| {z }
a(t)
d
dt
a(t) = kpjx(t)
J =
Z T
0
jx(t)2
+ wT dtgoal function
system model
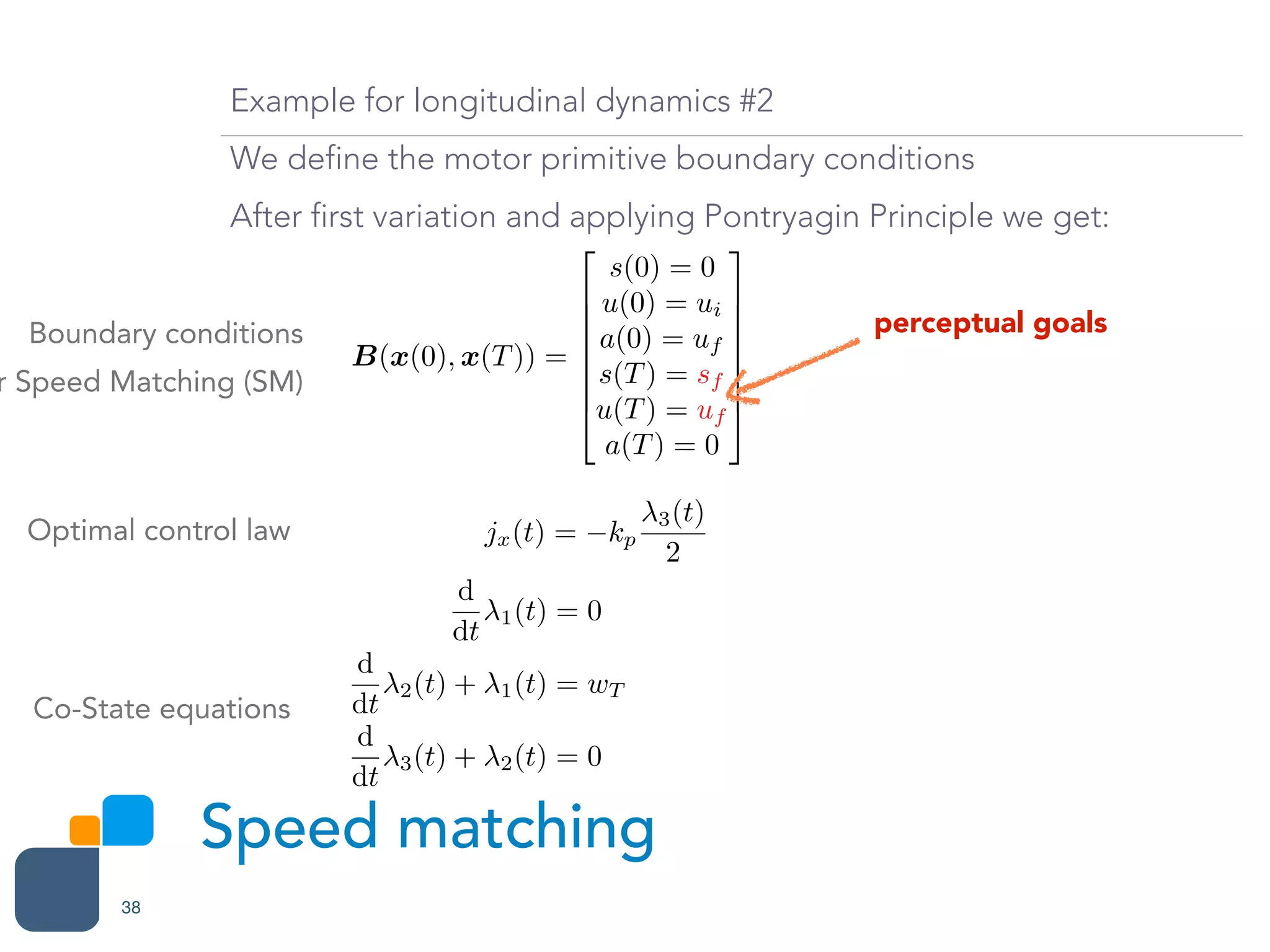
B(x(0), x(T)) = 0Boundary conditions
J =
Z T
0
[jx(t)2
+ wT + 1(t)
✓
d
dt
s(t) u(t)
◆
+ 2(t)
✓
d
dt
u(t) a(t)
◆
+ 3(t)
✓
d
dt
a(t) kpjx(t)
◆
]dt
x = [s(t), u(t), a(t)]states](https://image.slidesharecdn.com/adaptivecognitivedrivingsystems-140709054829-phpapp02/75/Adaptive-cognitive-driving-systems-32-2048.jpg)
![Anticipation of overtake
54
13
in-
de-
dictive tracking of dynamic actions” [123].
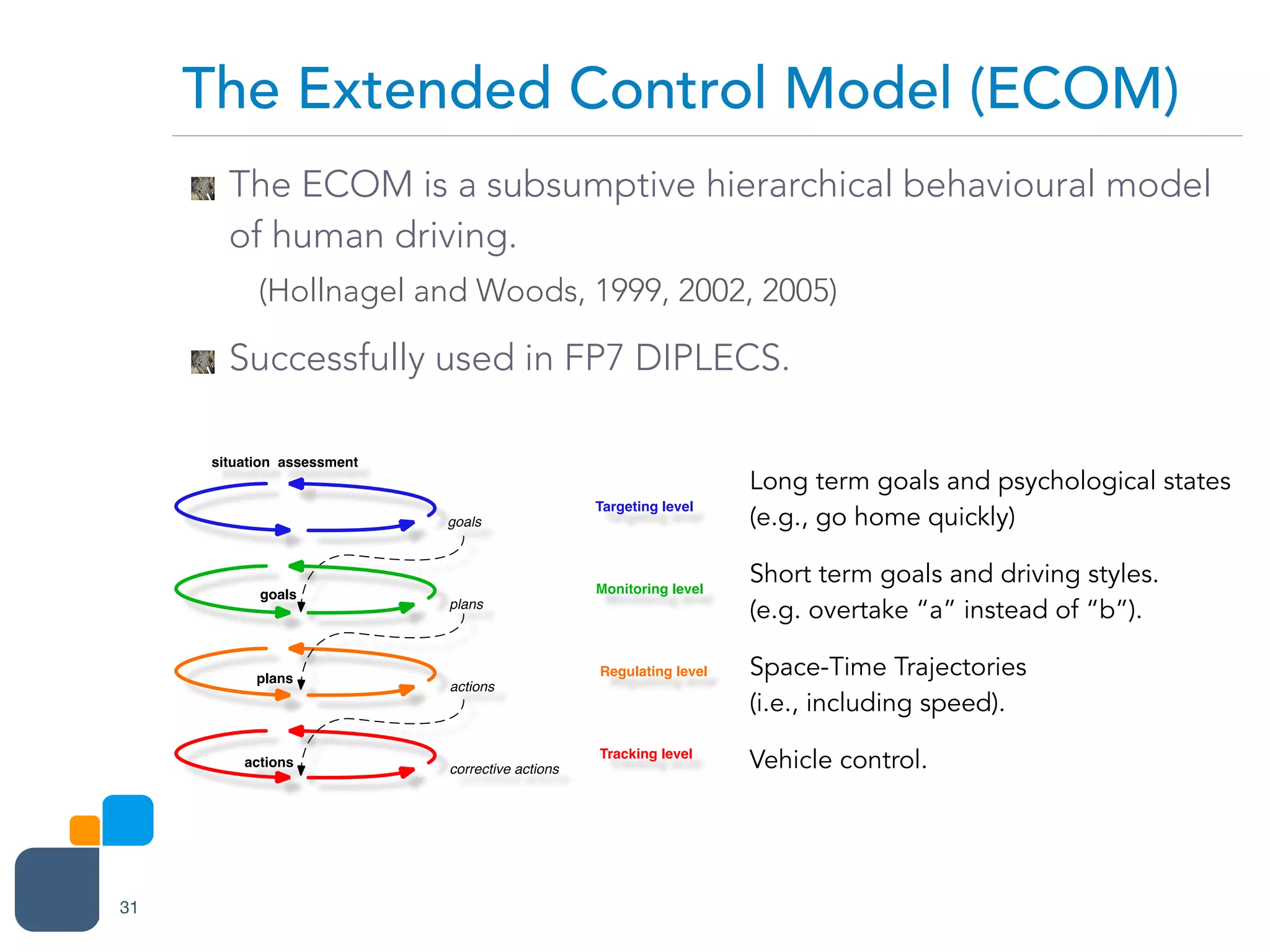
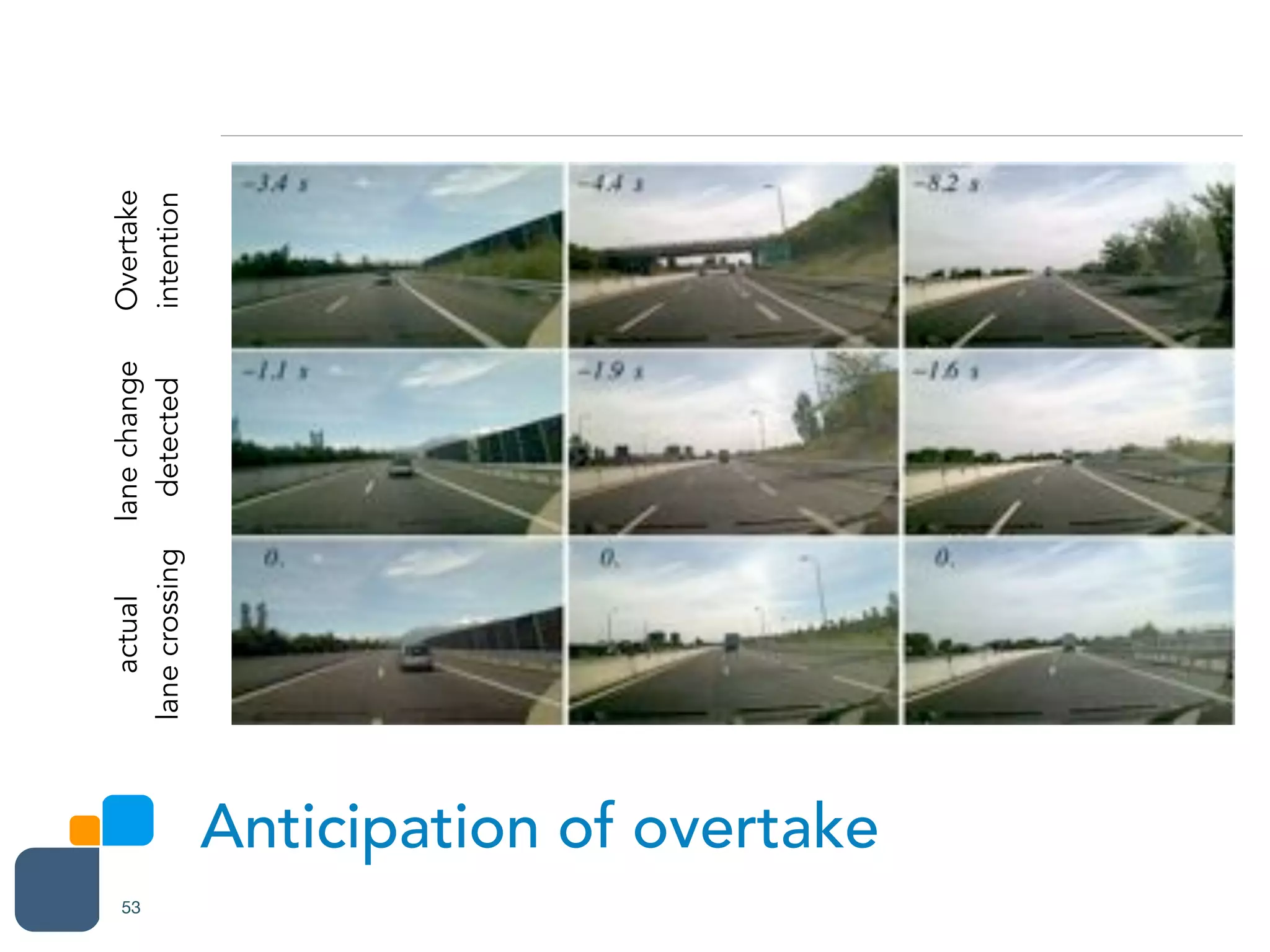
The prediction of overtaking, for maneuvers 2, 6, 10, 14 and
lane change for cases 2, 6, 10, 14 and 18 (left to right). First row: overtake intention
ehavior). Second row: lane change detected as motor primitive level transition (LD
n Systems Transactions and Magazine
Overtake
intention
lanechange
detected
actual
lanecrossing
ForReview
Only
driver passes to edges during transitions (e.g., taking the first
exit ramp at cycle ~700). The numbered light green bands
stand for the lane changes. The interval between when the LD
motor primitive predicts the lane crossing and the actual cross-
ing of the lane is shaded. There are 21 changes correctly pre-
dicted, with anticipation ranging from 1.1 s to 2.4 s (median
1.6 s).
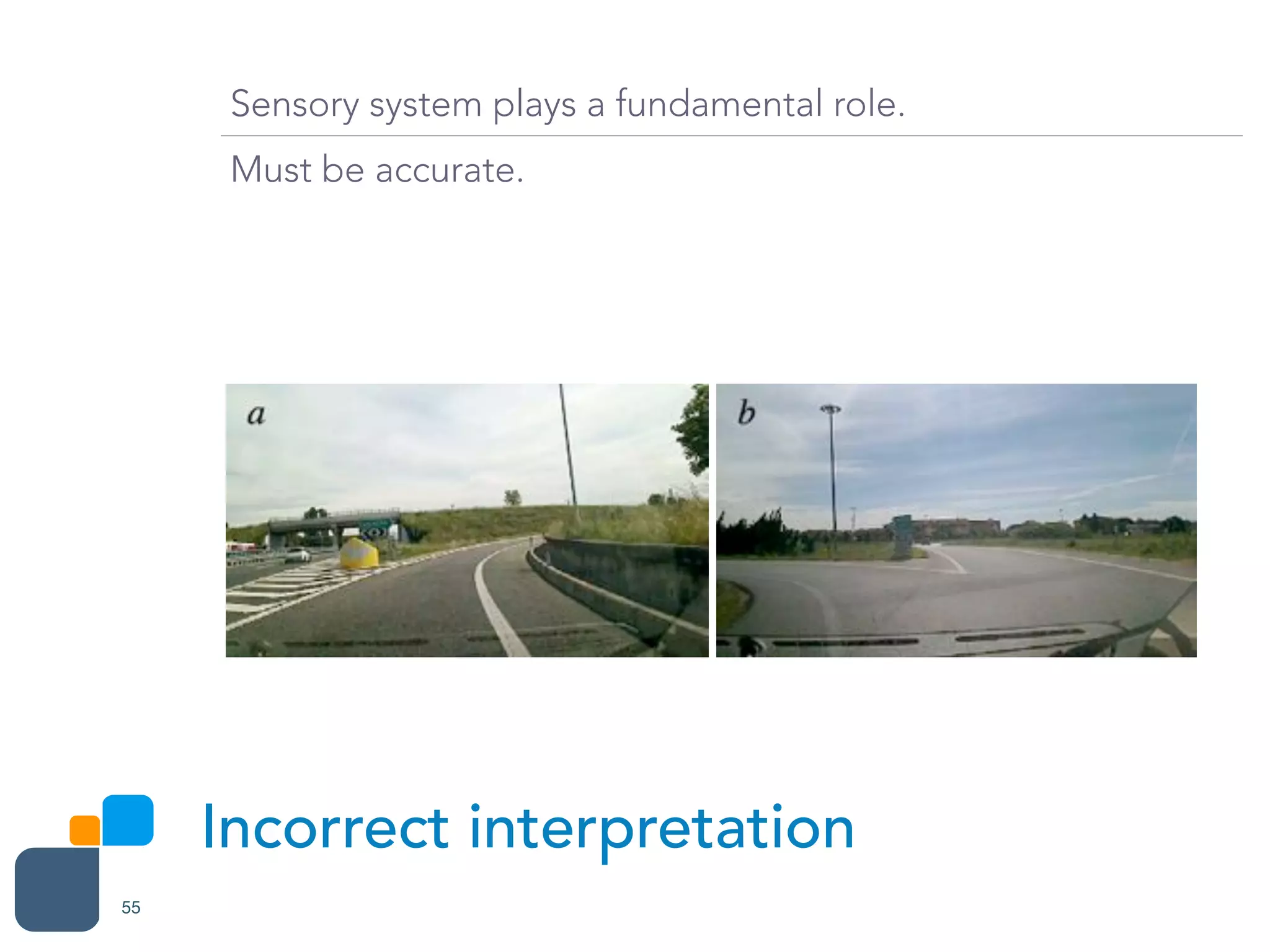
There are two false crossing predictions, labeled a, and b, that
happen in the non-motorway section when the trajectory pass-
es close to edges. Fig 10 shows the camera view to demon-
strate how demanding this situation actually is. Despite the
false prediction, the absolute value of the lateral prediction
error is limited (a fraction of the vehicle width). Non-
motorway segments are characterized by often-irregular lane
geometry, with splitting and merging lanes, often with missing
marking traits (Fig.10 b), or else the camera failing to recog-
nize them.
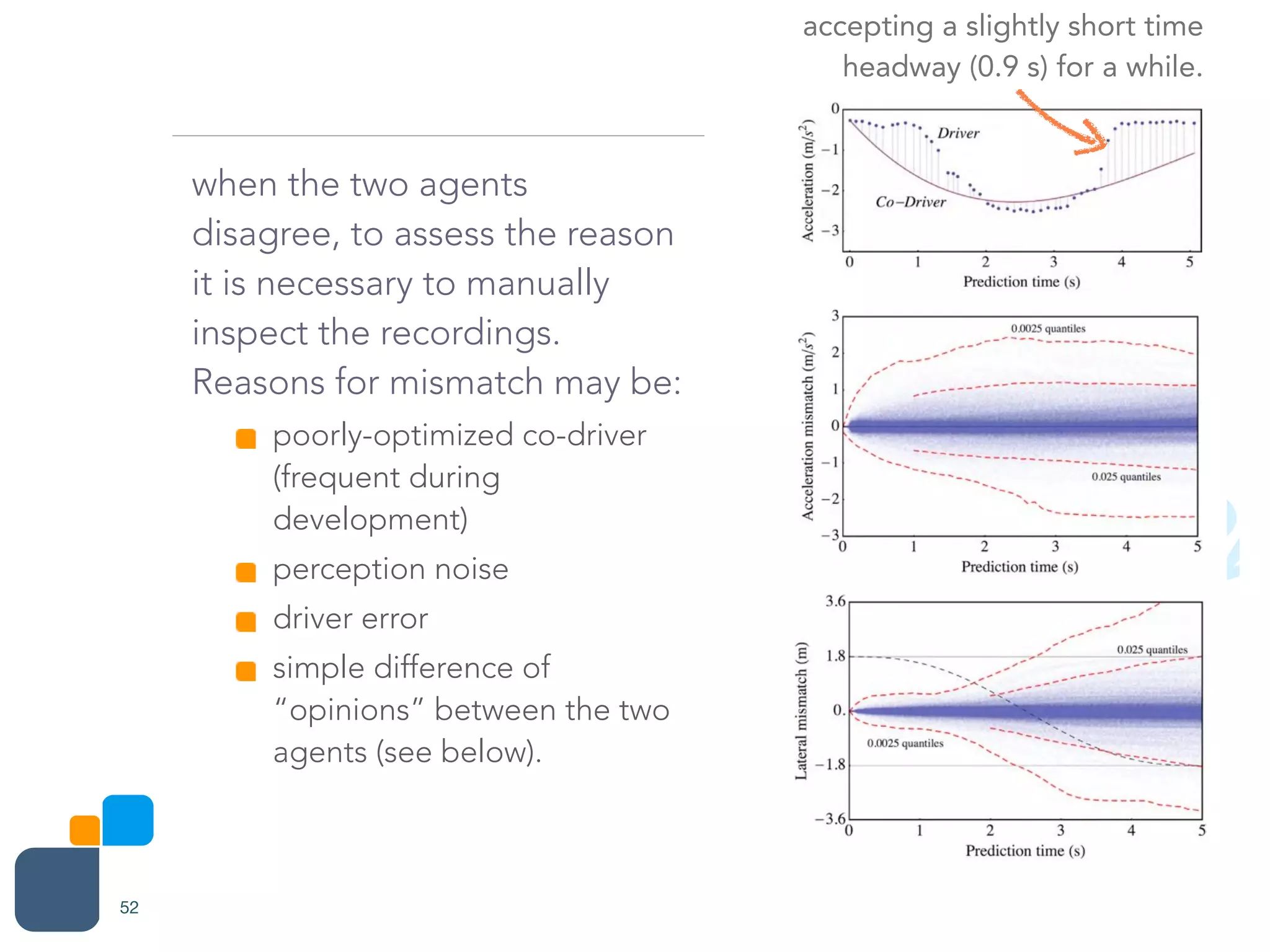
Fig.8 (c) shows that 0.0025 quantile curves, i.e., 99.5% of
the LD motor primitives depart from the real trajectory for less
than one quarter of lane in 2 s, less than half lane in 2.5 s and
less than one full lane in 5 s. The points where larger devia-
tions happen may be seen in Fig.9 (the prediction error is plot-
ted). They are typically at inversions of the heading angle and
in complex geometries (a and b).
In Fig.9 (b), the dashed blue vertical lines before lane
changes 2, 6 10, 14 and 18, mark the point where the co-driver
switches from FollowObject (second-level) behavior to Clear-
Object behavior. This is the point where the agent realizes that
the human intention may be to overtake.
For example, Fig.11 shows the control output space 4.1 s
before lane change 18, showing how the driver is going to
chose the overtake maneuver.
Fig. 10 Complex geometry at false alarm points.
Fig. 11 Detection of the intention to overtake (the camera view for this is
given by the top right frame of Fig.12).
Fig. 9. Comparison of driver and co-drover on a 10 minute course. (a, top) longitudinal dynamics (see text). (b, bottom) lateral dynamics.
PLEASE KEEP CONFIDENTIAL
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60](https://image.slidesharecdn.com/adaptivecognitivedrivingsystems-140709054829-phpapp02/75/Adaptive-cognitive-driving-systems-49-2048.jpg)


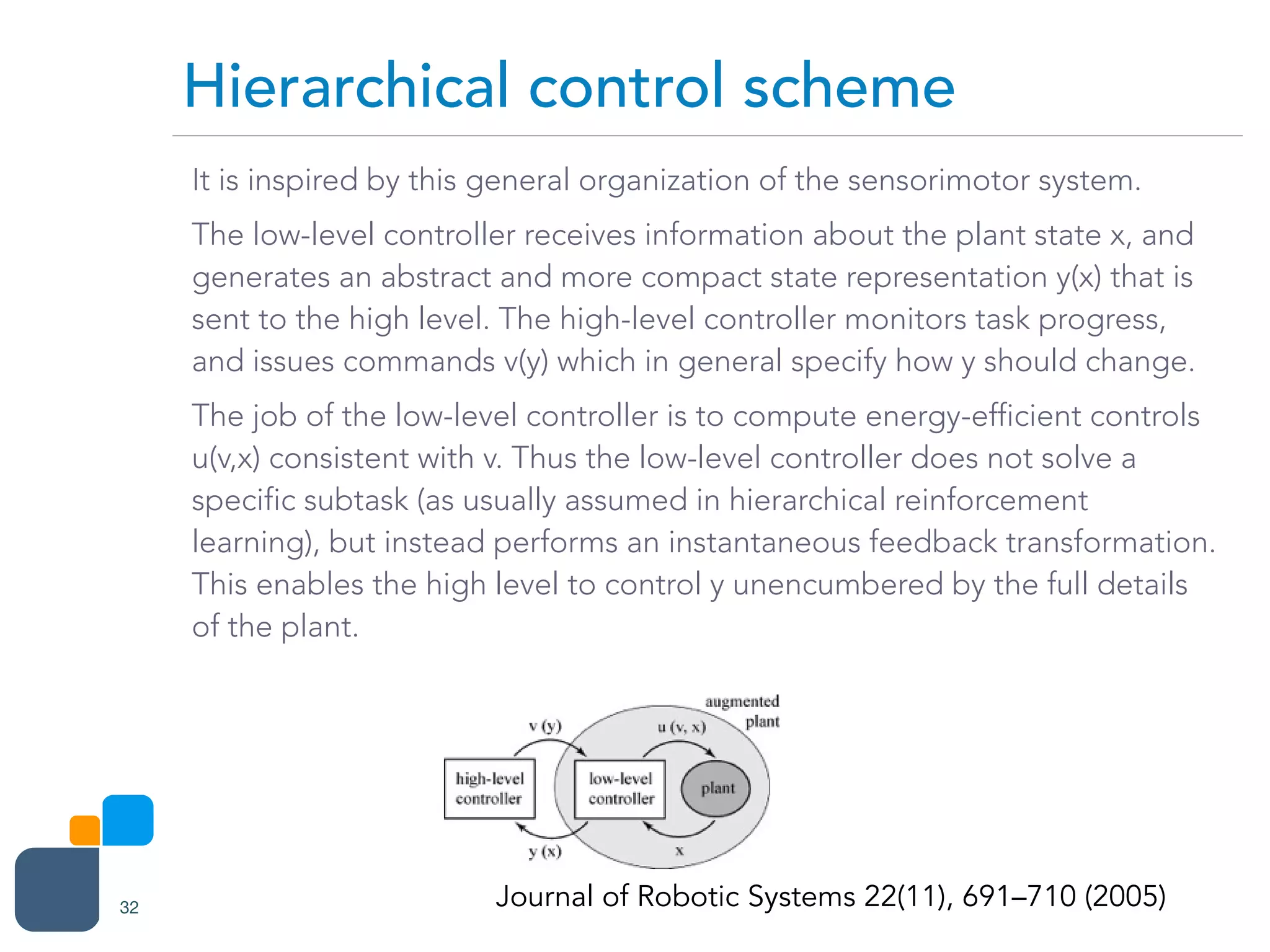
The document presents an adaptive cognitive system designed to enhance the driving tasks of future vehicles through a co-driver model that understands human driver intentions and actions. It emphasizes the importance of driver cooperation and the need for the co-driver to emulate human-like sensory-motor behaviors to ensure efficient vehicle control. Key technologies discussed include simulation theories of cognition, generative approaches for agent behavior, and a hierarchical behavioral model inspired by human motor control.
































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)

