Lucrarea 'Statica construcțiilor. Structuri statice determinate' de Mircea-Eugen Teodorescu, destinat studenților de la facultatea de hidrotehnică, abordează calculul structurilor de rezistență prin șase capitole ce acoperă aspecte generale, structuri din bare drepte, grinzi cu zăbrele, arce, principiul lucrului mecanic virtual și linii de influență. Fiecare capitol oferă explicații teoretice și exemple numerice pentru a facilita înțelegerea conceptelor de statică și comportamentul materialelor în fața diferitelor încărcări. Lucrarea subliniază importanța schematizărilor și ipotezelor simplificatoare în procesul de calcul al structurilor, precum și diverse tipuri de legături și comportamentul materialelor utilizate.




























































![- 64 -
Din încărcarea cu forţa egală cu unitatea au rezultat diagramele unitare de forţă
axială n3 şi de moment încovoietor m3.
Fig. 2.26
Ţinînd cont de convenţia de semne prezentată în paragraful 1.5.4, valoarea
deplasării pe verticală a secţiunii 3 este
[ ]
mm18,5m00518,035,51847535,43
6,0
30
51
2
1
4,0
30
31
2
1
255567,0535,02
dx
h
t
mdxtnv 3m33
−=−=α−=α−α−=
=
⋅⋅⋅−⋅⋅⋅−α+⋅⋅−⋅⋅−α=
=⋅
∆
⋅α+⋅⋅α= ∫∫
Se constată că efectul forţei axiale este mult mai mic în comparaţie cu efectul
momentului încovoietor.
m3
11
n3
-
-
0,5
0,567
44
4
51
2
3
3
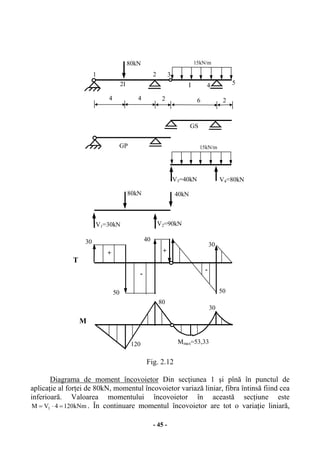
3
1
3
1
2
1
2
1
1kN
3
+200
h=40cm h=40cm
h=60cmh=60cm
-100
-100
-100
-
-
0,5](https://image.slidesharecdn.com/44710438-29315365-structuri-static-determinate-curs-140507035247-phpapp02/85/44710438-29315365-structuri-static-determinate-curs-64-320.jpg)
![- 65 -
Exemplul 2.14. Să se determine deplasarea secţiunii 3 la acţiunea cedărilor de
reazeme ∆u=2cm şi ∆v=1cm.
Fig. 2.27
- calculul deplasării u3. Se încarcă structura cu forţa orizontală egală cu unitatea
în secţiunea 3, se calculează reacţiunile. Se observă că numai reacţiunile din reazemul
5 produc lucru mecanic, deci deplasarea u3 este
[ ] cm5,113,026,0u3 +=⋅−⋅−−=
- calculul deplasării v3. În mod analog se încarcă structura cu forţa verticală
egală cu unitatea aplicată în secţiunea 3, se calculează reacţiunile şi utilizînd relaţia
(1.47) se determină deplasarea v3
[ ] cm214,028,0u3 +=⋅−⋅−−=
64
4
1
2
3
0,6
1kN
0,4
0,8 0,8
5
0,3 0,3
0,4 0,6
1kN
u∆
v∆
3](https://image.slidesharecdn.com/44710438-29315365-structuri-static-determinate-curs-140507035247-phpapp02/85/44710438-29315365-structuri-static-determinate-curs-65-320.jpg)

































































































![Problemele rezistentelor materialelor.[conspecte.md]](https://cdn.slidesharecdn.com/ss_thumbnails/problemelerezistentelormaterialelor-201029125917-thumbnail.jpg?width=640&height=640&fit=bounds)












