Download to read offline







![8 ■ NONHOMOGENEOUS LINEAR EQUATIONS
Answers
1.
3.
5.
7.
9.
11. The solutions are all
asymptotic to as
. Except for ,
all solutions approach
either or as .
13.
15.
17.
19.
21.
23.
25.
27. y [c1 Ϫ
1
2 x ͑ex
͞x͒ dx]eϪx
ϩ [c2 ϩ
1
2 x ͑eϪx
͞x͒ dx]ex
y ͓c1 ϩ ln͑1 ϩ eϪx
͔͒ex
ϩ ͓c2 Ϫ eϪx
ϩ ln͑1 ϩ eϪx
͔͒e2x
y ͑c1 ϩ x͒ sin x ϩ ͑c2 ϩ ln cos x͒ cos x
y c1ex
ϩ c2 xex
ϩ e2x
y c1 cos 2x ϩ c2 sin 2x ϩ
1
4 x
yp xeϪx
͓͑Ax2
ϩ Bx ϩ C͒ cos 3x ϩ ͑Dx2
ϩ Ex ϩ F͒ sin 3x͔
yp Ax ϩ ͑Bx ϩ C͒e9x
yp Ae2x
ϩ ͑Bx2
ϩ Cx ϩ D͒ cos x ϩ ͑Ex2
ϩ Fx ϩ G͒ sin x
x l ϪϱϪϱϱ
ypx l ϱ
yp ex
͞10
yp
5
_4
_2 4
y ex
(1
2 x2
Ϫ x ϩ 2)
y
3
2 cos x ϩ
11
2 sin x ϩ
1
2 ex
ϩ x3
Ϫ 6x
y e2x
͑c1 cos x ϩ c2 sin x͒ ϩ
1
10 eϪx
y c1 ϩ c2e2x
ϩ
1
40 cos 4x Ϫ
1
20 sin 4x
y c1eϪ2x
ϩ c2eϪx
ϩ
1
2 x2
Ϫ
3
2 x ϩ
7
4
Click here for solutions.S](https://image.slidesharecdn.com/3c3-nonhomgenlineqnsstu-140613021622-phpapp01/85/3c3-nonhomgen-lineqns-stuhuhuhuhuhh-8-320.jpg)

![11. yc(x) = c1e−x/4
+ c2e−x
. Try yp(x) = Aex
. Then
10Aex
= ex
, so A = 1
10
and the general solution is
y(x) = c1e−x/4
+ c2e−x
+ 1
10
ex
. The solutions are all composed
of exponential curves and with the exception of the particular
solution (which approaches 0 as x → −∞), they all approach
either ∞ or −∞ as x → −∞. As x → ∞, all solutions are
asymptotic to yp = 1
10
ex
.
13. Here yc(x) = c1 cos 3x + c2 sin 3x. For y00
+ 9y = e2x
try yp1 (x) = Ae2x
and for y00
+ 9y = x2
sin x try
yp2 (x) = (Bx2
+ Cx + D) cos x + (Ex2
+ Fx + G) sin x. Thus a trial solution is
yp(x) = yp1 (x) + yp2 (x) = Ae2x
+ (Bx2
+ Cx + D) cos x + (Ex2
+ Fx + G) sin x.
15. Here yc(x) = c1 + c2e−9x
. For y00
+ 9y0
= 1 try yp1 (x) = Ax (since y = A is a solution to the complementary
equation) and for y00
+ 9y0
= xe9x
try yp2 (x) = (Bx + C)e9x
.
17. Since yc(x) = e−x
(c1 cos 3x + c2 sin 3x) we try
yp(x) = x(Ax2
+ Bx + C)e−x
cos 3x + x(Dx2
+ Ex + F)e−x
sin 3x (so that no term of yp is a solution of the
complementary equation).
Note: Solving Equations (7) and (9) in The Method of Variation of Parameters gives
u0
1 = −
Gy2
a (y1y0
2 − y2y0
1)
and u0
2 =
Gy1
a (y1y0
2 − y2y0
1)
We will use these equations rather than resolving the system in each of the remaining exercises in this section.
19. (a) The complementary solution is yc(x) = c1 cos 2x + c2 sin 2x. A particular solution is of the form
yp(x) = Ax + B. Thus, 4Ax + 4B = x ⇒ A = 1
4
and B = 0 ⇒ yp(x) = 1
4
x. Thus, the general
solution is y = yc + yp = c1 cos 2x + c2 sin 2x + 1
4
x.
(b) In (a), yc(x) = c1 cos 2x + c2 sin 2x, so set y1 = cos 2x, y2 = sin 2x. Then
y1y0
2 − y2y0
1 = 2 cos2
2x + 2 sin2
2x = 2 so u0
1 = −1
2
x sin 2x ⇒
u1(x) = −1
2
R
x sin 2x dx = −1
4
¡
−x cos 2x + 1
2
sin 2x
¢
[by parts] and u0
2 = 1
2
x cos 2x
⇒ u2(x) = 1
2
R
x cos 2xdx = 1
4
¡
x sin 2x + 1
2
cos 2x
¢
[by parts]. Hence
yp(x) = −1
4
¡
−x cos 2x + 1
2
sin 2x
¢
cos 2x + 1
4
¡
x sin 2x + 1
2
cos 2x
¢
sin 2x = 1
4
x. Thus
y(x) = yc(x) + yp(x) = c1 cos 2x + c2 sin 2x + 1
4
x.
10 ■ NONHOMOGENEOUS LINEAR EQUATIONS
21. (a) r2
− r = r(r − 1) = 0 ⇒ r = 0, 1, so the complementary solution is yc(x) = c1ex
+ c2xex
. A particular
solution is of the form yp(x) = Ae2x
. Thus 4Ae2x
− 4Ae2x
+ Ae2x
= e2x
⇒ Ae2x
= e2x
⇒ A = 1
⇒ yp(x) = e2x
. So a general solution is y(x) = yc(x) + yp(x) = c1ex
+ c2xex
+ e2x
.
(b) From (a), yc(x) = c1ex
+ c2xex
, so set y1 = ex
, y2 = xex
. Then, y1y0
2 − y2y0
1 = e2x
(1 + x) − xe2x
= e2x
and so u0
1 = −xex
⇒ u1 (x) = −
R
xex
dx = −(x − 1)ex
[by parts] and u0
2 = ex
⇒
u2(x) =
R
ex
dx = ex
. Hence yp (x) = (1 − x)e2x
+ xe2x
= e2x
and the general solution is
y(x) = yc(x) + yp(x) = c1ex
+ c2xex
+ e2x
.](https://image.slidesharecdn.com/3c3-nonhomgenlineqnsstu-140613021622-phpapp01/85/3c3-nonhomgen-lineqns-stuhuhuhuhuhh-10-320.jpg)
![23. As in Example 6, yc(x) = c1 sin x + c2 cos x, so set y1 = sin x, y2 = cos x. Then
y1y0
2 − y2y0
1 = − sin2
x − cos2
x = −1, so u0
1 = −
sec x cos x
−1
= 1 ⇒ u1(x) = x and
u0
2 =
sec x sin x
−1
= − tan x ⇒ u2(x) = −
R
tan xdx = ln |cos x| = ln(cos x) on 0 < x < π
2
. Hence
yp(x) = x sin x + cos x ln(cos x) and the general solution is y(x) = (c1 + x) sin x + [c2 + ln(cos x)] cos x.
25. y1 = ex
, y2 = e2x
and y1y0
2 − y2y0
1 = e3x
. So u0
1 =
−e2x
(1 + e−x)e3x
= −
e−x
1 + e−x
and
u1(x) =
Z
−
e−x
1 + e−x
dx = ln(1 + e−x
). u0
2 =
ex
(1 + e−x)e3x
=
ex
e3x + e2x
so
u2(x) =
Z
ex
e3x + e2x
dx = ln
µ
ex
+ 1
ex
¶
− e−x
= ln(1 + e−x
) − e−x
. Hence
yp(x) = ex
ln(1 + e−x
) + e2x
[ln(1 + e−x
) − e−x
] and the general solution is
y(x) = [c1 + ln(1 + e−x
)]ex
+ [c2 − e−x
+ ln(1 + e−x
)]e2x
.
27. y1 = e−x
, y2 = ex
and y1y0
2 − y2y0
1 = 2. So u0
1 = −
ex
2x
, u0
2 =
e−x
2x
and
yp(x) = −e−x
Z
ex
2x
dx + ex
Z
e−x
2x
dx. Hence the general solution is
y(x) =
µ
c1 −
Z
ex
2x
dx
¶
e−x
+
µ
c2 +
Z
e−x
2x
dx
¶
ex
.
NONHOMOGENEOUS LINEAR EQUATIONS ■ 11](https://image.slidesharecdn.com/3c3-nonhomgenlineqnsstu-140613021622-phpapp01/85/3c3-nonhomgen-lineqns-stuhuhuhuhuhh-11-320.jpg)

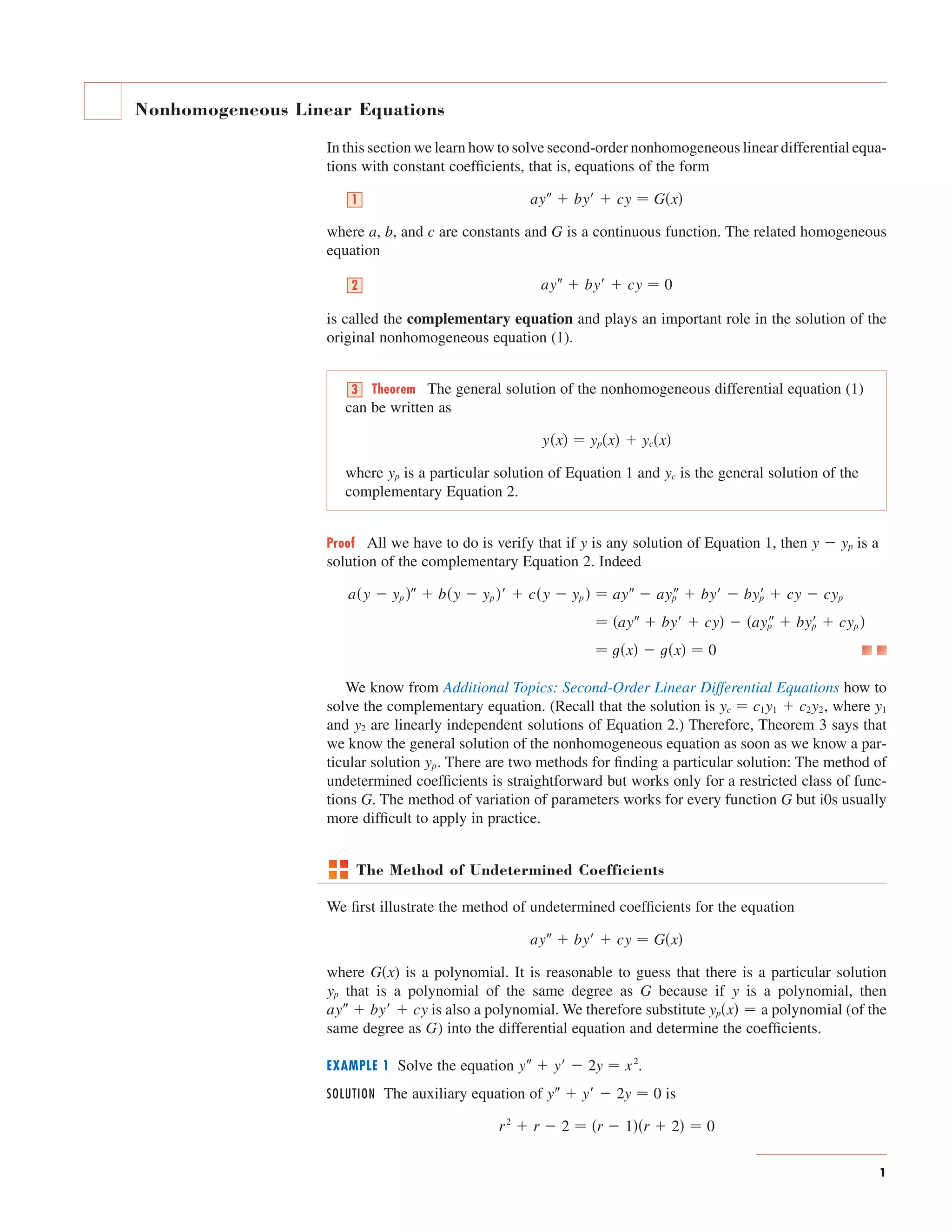
This document discusses methods for solving second-order nonhomogeneous linear differential equations. It introduces the method of undetermined coefficients, where an educated guess for the form of the particular solution is made based on the right-hand side of the equation. It also introduces the method of variation of parameters, which can find a particular solution for any right-hand side function. Example problems demonstrate applying undetermined coefficients to polynomial, exponential, trigonometric, and combined right-hand sides.















































