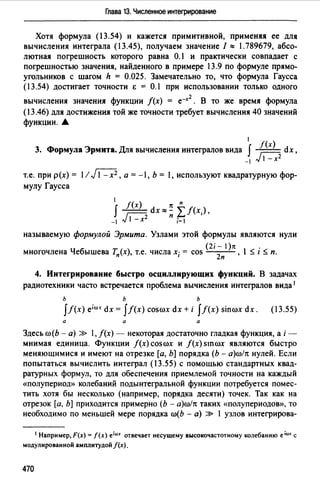
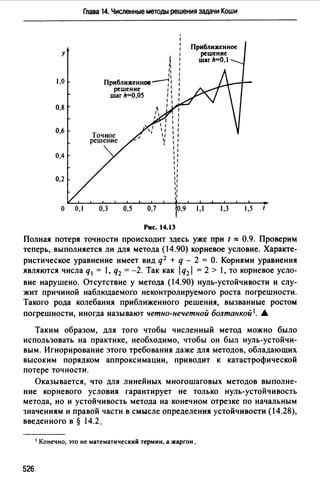
Учебное пособие охватывает вычислительные методы, используемые для решения инженерных и научно-технических задач, включая линейную алгебру, нелинейные уравнения, численное интегрирование и дифференцирование. Книга предназначена для студентов и аспирантов технических вузов, а также инженеров и научных работников, содержащая примеры, иллюстрации и обсуждения методов, алгоритмов и их реализации на компьютере. Второе издание включает исправления и новые темы, основанные на опыте преподавания и актуальных методах вычислений.

![Глава 1. Математическое моделирование и решение прикладных задач
собой прикладных программ и системных средств, включающих сред
ства, предоставляемые пользователю для управления ходом вычисли
тельного эксперимента, обработки и представления его результатов.
Такой комплекс программ иногда называют пробле.мно-ориентирован
ным пакетом прикладных програм,~1.
§ 1.4. Допоnнитеnьные замечани1
1. Математическое моделирование является основой современной
методологии решения прикладных задач, и его роль объективно возрас
тает в связи с необходимостью решения все более сложных приклад
ных проблем.
2. Эффективность применения компьютера в той или иной области
науки и техники тем выше, чем совершеннее ее математические
модели. В то же время использование компьютера для исследования
каких-либо процессов часто служит серьезным стимулом для создания
новых математических моделей и детального изучения лих процессов
другими методами.
3. Само по себе применение компьютера не позволяет решить
прикладную задачу, а лишь дает в руки исследователя мощный инст
румент познания. Использование компьютера не только не освобож
дает от необходимости глубоко осмыслить решаемую проблему, но и
заставляет уделять постановке задачи гораздо больше внимания.
4. Вычислительный эксперимент не противоречит натурному экс
перименту и классическому математическому анализу прикладной
задачи, а, напротив, находится с ними в органическом единстве.
5. Для успешного применения метода математического моделирова
ния с использованием компьютера необходимо гармоническое владе
ние всеми его составляющими. В настоящем пособии основное внима
ние уделено вычислительным методам и алгоритмам, анализу свойств
вычислительных задач, интерпретации получаемых результатов.
6. Дополнительную информацию о методологии современного м~rrема
тическоrо моделирования и концепции вычислительного эксперимента
можно получить из следующих источников: [58, 71, 79, 96, 99, 11 *].
7. В настоящее время большое количество высококачественных про
грамм и пакетов программ распространяется бесплатно. Например,
через lnternet по адресу http://www.netlib.org доступно программное
обеспечение, предназначенное для решения широкого спектра приклад
ных задач. Кроме того, по адресу http://www.acm.org/pubs/cago можно
найти 866 тщательно разработанных программ, реализующих эффек
тивные вычислительные алгоритмы.
24](https://image.slidesharecdn.com/33379-160302054853/85/33379-25-320.jpg)

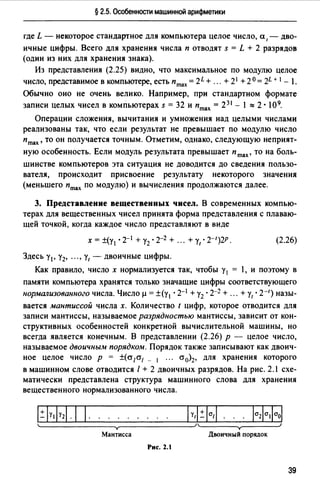
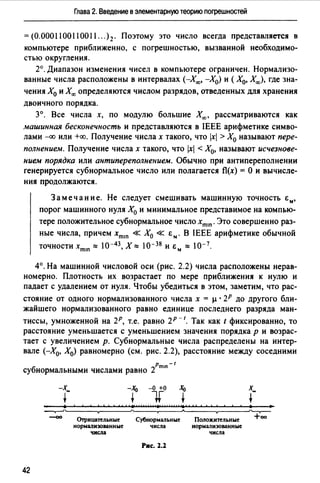
![Глава 2. Введение в элементарную теорию nоrрешностей
Пр им ер 2.5. С какой относительной точностью следует найти
число а*, чтобы верными оказались шесть его значащих цифр?
Из утверждения 2° следует, что достаточно найти а• с относитель
ной точностью 6::::: 10-6• .&
Заметим, что границы абсолютной и относительной погрешностей
принято записывать с одной или двумя значащими цифрами. Большая
точность в записи этих величин, как правило, не имеет смысла, так как
обычно они являются довольно грубыми оценками истинных значений
погрешностей, и кроме того, для практического использования часто
бывает достаточно знать только их порядок.
Пр им ер 2.6. Информация о погрешности вида о(а*) ::::: 0.288754 • 1o-s
практически равноценна информации о(а*) ::::: 3. 10-6' причем послед
няя вызывает больше доверия. Скорее всего, вполне удовлетворитель
ной в данном случае является и запись о(а*) - 10-6. .&
Неравенство (2.3) эквивалентно двойному неравенству
а• - Л(а*) $а$ а• + Л(а*)
и поэтому тот факт, что число а• является приближенным значением
числа а с верхней границей абсолютной погрешности Л(а*) [с абсо
лютной точностью i; = Л(а*) ], принято записывать в виде
а= а* ± Л(а*).
Как правило, числа а• и Л(а*) указывают с одинаковым числом
цифр после десятичной точки.
Пр им ер 2.7. Пусть для числа а известны приближенное значение
а•= 1.648 и граница абсолютной погрешности Л(а*) = 0.002832. Тогда
можно записать а= 1.648 ± 0.003. Записи вида а= 1.648 ± 0.002832 или
а = 1.648 ± 0.1 являются неестественными. .&
Из неравенства (2.4) следует, что значение а заключено примерно
между а*(! - 8(а*)) и a*(I + 8(а*)). Поэтому тот факт, что число а•
является приближенным значением числа а с границей относительной
погрешности 8(а*) (с относительной точностью i; = 8(а*) ), принято
записывать в виде а= а• (1 ± 8(а*) ).
Пр им ер 2.8. Оценим точность часто используемого в простейших
расчетах приближения тт* = 3 14 к числу тt. Поскольку тt = 3.14159"" то
7t - тт* = 0.00159... Следовательно, можно принять Л(тт*) = 0.0016
и 8(тт*)::::: 0.0016/3 14::::: 0.00051=0.051 %. Итак, тt = 3.14(1±О051 %). .&
30](https://image.slidesharecdn.com/33379-160302054853/85/33379-31-320.jpg)

![Глава 2. Введение в элементарную теорию погрешностей
Разделив обе части полученного неравенства на 1аЬ1. выведем
оценку (2.12).
Для вывода второй оценки предварительно заметим, что
1ь·1=1ь + (Ь. - b)I ~ 1ь1 -Л(Ь.) = lbl(l - о(Ь•)).
Тогда
о(а·1ь·)= lа!ь-а·1ь·1 = lаь·-ьа·1 =
la!bl laь*I
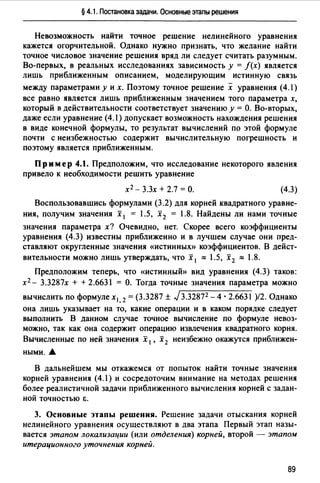
= 1а(Ь* - Ь) + Ь(а - a*)I < 1аlЛ(Ь°) + /ЬIЛ(а*) = S(b*) + S{a*) 8
1аь*I - 1abl(1 -о(ь*)) 1- s(ь*) .
Следствие. Если 8(а*) « 1 и Б(Ь•) « 1, то для оценки границ
относительных погрешностей можно использовать следующие при
ближенные равенства:
8(а* ь•) ~ 8(а•)+ 8(Ь*), 8(а* !Ь*) ~ 8(а*)+ 8(Ь*). (2.14)
Именно равенства (2.14) чаще всего и используют для практической
оценки погрешности.
Итак, выполнение арифметических операций над приближенными
числами, как правило, сопровождается потерей точности. Единствен
ная операция, при которой потеря не происходит, - это сложение
чисел одного знака. Наибольшая потеря точности может произойти при
вычитании близких чисел одного знака.
§ 2.4. Погрешность функции
1. Погрешность функции многих переменных. Пусть f(x) =
= f(x 1, х2, •.. , хт) - дифференцируемая в области G функция т перемен
ных, вычисление которой производится при приближенно заданных зна
чениях аргументов х~, х;, "., х:. Такая ситуация возникает, например
всякий раз, когда на компьютере производится расчет по формуле. Важно
знать, каково значение неустранимой погрешности, вызванной тем, что
вместо значения у = f(x) в действительности вычисляется значение
у•= f(x•), где х• = (х~, х;, "., х: ).
Введем обозначения: пусть [х, х*] - отрезок1, соединяющий точки
х их*, и r;. = дf/дхj.
J
1 Отрезком, соединяющим точки х их' в m-мерном пространстве, называется множе
ство точек видаах + ( - а)х', О :5 а :5 .
34](https://image.slidesharecdn.com/33379-160302054853/85/33379-35-320.jpg)
![§ 2.4. Погрешность функции
Предложение 2.5. Для абсолютной погрешности значения
у• = f(x*) справедлива следующая оценка:
т
Л(у0 ) ~ L . max • 11;}х)1 Л(х;).
j=I х Е [х,х ]
(2.15)
До к аз ат ель ст в о. Оценка (2.15) вытекает из формулы конечных
приращений Лагранжа1:
т
f(x)-f(x0
) = L1; (х)(хгхj), хе [х,х0 ]. •
j=I j
Следствие. Если х• ""х, то в силу оценки (2.15) можно положить
- т -
Л(у0
)"" L 11;.(х0 ) 1Л(х/)'
j=I 1
(2.16)
- т
Л(у0 )"" L ll;}x) 1Л(х/). (2.17)
j=I
Равенство (2.16) удобно для практических оценок, а равенством
(2.17) мы воспользуемся в дальнейшем для теоретических построений.
Из (2.16), (2.17) вытекают приближенные равенства для оценки гра
ниц относительных погрешностей:
- т -
о(у*)"" 2: vjo<x/),
j=I
lxjl IJ;.(x*)/
v• = J
j lt(x0
)I '
- т -
о(у*)"" 2: vjo<xj).
j=I
(2.18)
(2.19)
Пр им ер 2.12. Пусть корни квадратного уравнения х2 + Ьх + с = О
вычисляются при значениях коэффициентов Ь "" 103, с "" 1. Каково влия
ние погрешностей задания коэффициентов на точность вычисляемых
значений?
Воспользуемся явными формулами для корней:
х1 = f(b, с)= (-Ь- ./d)l2, х2 =g(b, с)= (-Ь + ./d)!2,
где d = Ь2 - 4с.
1 Жозеф Луи Лагранж (1736--1813) - французский математик, механик и астроном.
Одии из создателей математического анализа, вариационного исчисления, классической
аналитической механики.
35](https://image.slidesharecdn.com/33379-160302054853/85/33379-36-320.jpg)


![Глава 2. Введение в элементарную теорию погрешностей
ются в виде (2.26) с нулевой мантиссой и показателем р =Ртах + l,
т.е. в виде
±оо =±(О.ООО ... О)· 2
Ртах+ 1
Символы ±сх:> ведут себя в соответствии со следующими естествен-
х
ными правилами: +сх:>+оо = +сх:>, (-l)x(+cx:>) = --<X.J, - =О для всякого
±00
+оо
числа х с плавающей точкой, =-- =±сх:> для всякого положительного
х
числах с плавающей точкой, +сх:> ЕВ х = +сх:> и т.д.
Символ NaN генерируется в случае, если результат выполняемой
операции не определен. Например 5= NaN, Д = NaN, Ох(+сх:>) = NaN,
00
+сх:> + (--СХ>) = NaN, ;;;; = NaN, NaN ЕВ х = NaN, NaN е NaN = NaN и т.д.
NaN числа представляются в виде (2.26) с ненулевой мантиссой и с
показателем р =Ртах + l.
Таким образом, IEEE арифметика замкнута относительно арифмети
ческих операций. Каждая выполняемая на компьютере операция имеет
результатом либо число с плавающей точкой, либо один из символов
+сх:>, --<X.J, NaN. Информация о возникновении символов ±сх:> или NaN
доводится до сведения пользователя выставлением индикатора особого
случая (exception flag), но работа программы при этом не прерывается.
Это позволяет разрабатывать более надежные программы. Любые два
NaN числа считаются различными. Поэтому простейший способ убе
диться в том, что х =NaN состоит в проверке свойства х *х.
Замечание. Казалось бы, результат выполнения операции о0 в
IEEE арифметике должен получить значение NaN, но в дей
ствительности принято соглашение, что о0 = l. Это соглашение
очень полезно при работе с многочленами.
§ 2.6. Допоnнитеnьные замечания
1. Более подробно приближенные числа и погрешности арифмети
ческих операций над ними изложены в известном учебном пособии
[35]. Здесь же приведены правила подсчета оставляемых значащих
цифр, которые рекомендуется применять при массовых «ручных»
вычислениях без точного учета погрешностей.
46](https://image.slidesharecdn.com/33379-160302054853/85/33379-47-320.jpg)
![§ 2.6. Дополнительные замечания
2. Дополнительную информацию об особенностях арифметических
операций над числами с плавающей точкой можно найти, например
в (23, 54, l02, 106].
3. В последнее время в практике вычислений в качестве меры
погрешности приближенного числа а• часто используют величину
1а -1а*11, объединяющую в себе черты абсолютной и относительной
1 + а
погрешностей. Она близка к Л(а*) при 1а1 « l и практически совпа
дает с 15(а*) при 1а1 » 1.
4. Информацию о IEEE стандарте можно найти в [54, 122, 5*, 15*,
20•, 24*].
5. Для уменьшения погрешностей округления иногда используется
рациональная арифметика. В ней каждое рациональное число пред
ставляется парой целых чисел (с увеличенным по сравнению со стан
дартным числом разрядов) - числителем и знаменателем. Арифмети
ческие операции над такими числами производятся как над обычными
рациональными дробями.
Рациональная арифметика реализована во многих пакетах символь
ных вычислений, например в пакетах Mathematica и MACSYMA.
6. К настоящему времени разработан интервальный анализ, даю
щий возможность заставить компьютер следить за совершаемыми
ошибками округления, чтобы затем получить гарантированные оценки
их накопления.
47](https://image.slidesharecdn.com/33379-160302054853/85/33379-48-320.jpg)
![§ 3.1. Корректность вычислительной задачи
Пр и мер 3.3. Задача о вычислении ранга матрицы в общем случае
неустойчива. В самом деле, для матрицы А = [ ~ ~] ранг равен 1,
поскольку det А = О и существует ненулевой элемент а11 = 1. Однако сколь
угодно малое возмущение коэффициента а22 на величину Е * О приводит
к матрице Аt = [~ ~] , для которой detA t = Е *О и, следовательно, ранг
равен 2. А
Пр им ер 3.4. Покажем, что задача вычисления определенного
ь
интеграла/= ffi.x) dx устойчива.
а
Пусть /*(х) - приближенно заданная интегрируемая функция и
ь
/* = ff*(x) dx. Определим абсолютную погрешность функции/* с
а
помощью равенства Л(/*} = sup lf(x)-/*(x}I, в котором знак sup
хе [а,Ь]
можно заменить на max, если f и /* непрерывны. Так как
ь
Л(/*)= IJ-J*I = lf(f(x)-/*(x))dxl ~(Ь-а)Л(/*}, (3.3)
а
то для любого Е >О неравенство Л(/*) < Е будет выполнено, если потре
бовать выполнение условия Л(/*) < S = El(b - а). .&
Пример 3.5. Покажем, что задача вычисления производной
и(х) = f'(x) приближенно заданной функции является неустойчивой.
Пусть/*(х)- приближенно заданная на отрезке [а, Ь] непрерывно
дифференцируемая функция и и*(х) = (/*)'(х). Определим абсолютные
погрешности с помощью равенств
Л(/*) = maxl /(x}-/*(x)I,
[а,Ь]
Л(и*) = maxl и(х)- u*(x)I.
[a,h]
Возьмем, например/*(х) = /(х) + аsш(х/а2 ), где О< а« .Тогда
и*(х) = и(х) + а- 1 cos(x /а2) и Л(и*) = а- 1 , в то время как Л(/*) = а.
Таким образом, сколь угодно малой погрешности задания функции f
может отвечать сколь угодно большая погрешность производной f'. .&
51](https://image.slidesharecdn.com/33379-160302054853/85/33379-52-320.jpg)
![Глава 3. Вычислительные задачи, методы и алгоритмы. Основные понятия
ные задачи некорректны. Не вызывает, например, сомнения практиче
ская важность решения некорректных задач дифференцирования и
суммирования ряда (см. примеры 3.5., 3.6). К некорректным задачам
относятся также обратные задачи геофизики, астрофизики, спектрогра
фии, многие задачи распознавания образов, задачи синтеза и ряд дру
гих прикладных задач.
К настоящему времени разработана теория решения многих классов
некорректных задач. Важная роль в создании методов решения таких
задач принадлежит российским математикам, в первую очередь
А.Н. Тихонову 1 • Эти методы (методы регуляризации) довольно сложны
и выходят за рамки данной книги. Мы ограничимся изложением в
§ 16.7 того, как метод регуляризации может быть применен в случае
некорректной задачи вычисления решения интегрального уравнения
Фредгольма первого ряда. Для первого знакомства с методами регуля
ризации можно рекомендовать учебные пособия (37, 97].
§ 3.2. Обусловленность вычислительной задачи
1. Определения. Пусть вычислительная задача корректна (ее
решение существует, единственно и устойчиво по входным данным).
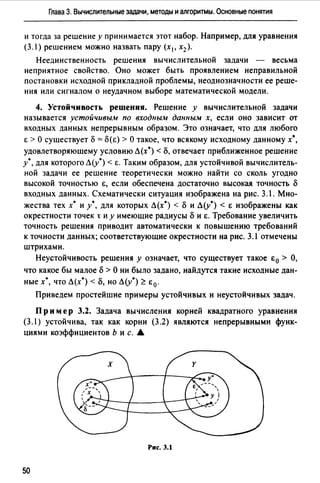
Теоретически наличие у задачи устойчивости означает, что ее реше
ние может быть найдено со сколь угодно малой погрешностью, если
только гарантировать, что погрешности входных данных достаточно
малы. Однако на практике погрешности входных данных не могут быть
сделаны сколь угодно малыми, точность их ограничена. Даже то что
исходные данные нужно будет ввести в компьютер, означает, что их
относительная точность будет заведомо ограничена величиной порядка
Ем (см. § 2.5). В реальности, конечно, уровень ошибок в исходной
информации будет существенно выше. Как же повлияют малые, но
конечные погрешности входных данных на решение, как сильно спо
собны они исказить желаемый результат? Для ответа на этот вопрос
введем новые понятия.
Под обусловленностью вычислительной задачи понимают чувстви
тельность ее решения к малым погрешностям входных данных. Задачу
называют хорошо обусловленной, если малым погрешностям входных
данных отвечают малые погрешности решения, и плохо обусловленной,
если возможны сильные изменения решения.
Часто оказывается возможным ввести количественную меру степени
обусловленности вычислительной задачи - число обусловленности.
Эту величину можно интерпретировать как коэффициент возможного
1 Андрей Николаевич Тихонов (1906-1993) - российский математик, один из созда
телей теории решения некорректных задач.
54](https://image.slidesharecdn.com/33379-160302054853/85/33379-55-320.jpg)
![Глава З. Вычислительные задачи, методы и алгоритмы. Основные понятия
мере 2.11 имеем v"" J1+x*l!J1 - x•I ""7 · 105, то потеря пяти верных
значащих цифр здесь не представляется удивительной.
2. Примеры плохо обусловленных задач. Первым рассмотрим
классический приМJ:р, принадлежащий Дж. Уилкинсону 1 [102].
Пр им ер 3.8. Пусть требуется найти корни многочлена
P(x)=(x- l)(x-2) ... (х-20)=х20_21Ох19+ ...
по заданным значениям его коэффициентов. Из теории известно, что
эта задача устойчива. Возьмем коэффициент а= -210 при х 19 и изме
ним его значение на а• = -21 О + 2-23• Как повлияет эта, казалось бы,
незначительная погрешность на значения корней? Заметим, что х 1 = 1,
х2 = 2, .. " х20 =20 - точные значения корней.
Вычисленные с высокой точностью корни возмущенного много
члена таковы:
х; "" 1.00000, х; "" 2.00000, х; "" 3.00000, х; "" 4.00000,
х; ""5.00000, х~ ""6.00001, х; ""6.99970, х; ""8.00727,
х; "" 8.91725, х;0, 11 "" 10.0953 ± 0.643501 i, х;2, 13 "" 11.7936 ± l.65233i,
х;4, 15 ""13.9924±2.51883i, х;6, 17 ""16.7307±2.81262i,
х;8, 19 "" 19.5024 ± 1.94033i, х;0 ""20.8469.
Как нетрудно видеть, корни х1 , ••• , х6 оказались практически нечувстви
тельны к погрешностям в коэффициенте а. В то же время некоторые
корни превратились в комплексные и имеют относительные погрешно
сти ОТ 6 ДО 18 %, несмотря на ТО, ЧТО О(а•) "" 6 • 1О-8 %.
В данном случае нетрудно провести анализ чувствительности кор
ней. Пусть F(x, а) = х20 + ах 19 + .... Будем рассматривать корни xk как
функции параметра а, т.е. xk = xk(a). Равенство F(xk(a), а)= О, выпол
ненное в окрестности точки а = -21 О, задает xk как неявную функцию
от а. Пользуясь второй из формул (2.22) для границы относительной
погрешности и применяя формулу (2.23) для производной неявной
функции, имеем
1 Джеймс Х. Уилкинсон (1918-1986) - американский математик, внесший значи
тельный вклад в современное пони'llание вычислительных методов. О деятельности
Джеймса Х. Уилкинсона см. (54].
56](https://image.slidesharecdn.com/33379-160302054853/85/33379-57-320.jpg)

![§ 3.2. Обусловленность вычислительной задачи
у
О 1t/2 1t З1t/2 21t 51t/2 З1t х
Рис. 3.3
который можно сделать, довольно прост: при использовании функции
у = sinx желательно проводить вычисления так, чтобы аргумент нахо
дился в диапазоне 1х1 < 2, поскольку здесь v0 ~ 1. А
ь
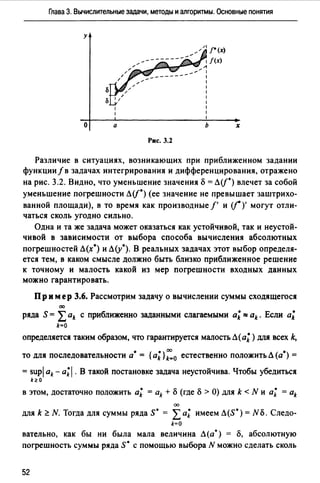
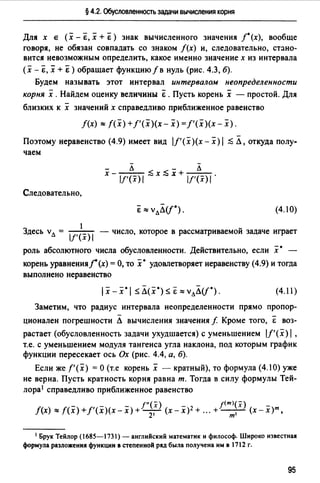
4. Обусловленность задачи вычисления интеграла/= fЛх) dx.
а
Как следует из оценки (3.3), в этом случае абсолютное число обуслов
ленности имеет вид vл = Ь - а. Если же перейти к рассмотрению отно-
сительных погрешностей и положить fJ(f*) = sup l/*(x)-f(x)l!if(x)I
(а, Ь]
для тех, х, где /(х) *О, то используя неравенство
ь h
Л(/*) ~ ЛJ*(x)-f(x)I dx ~ JIЛx)I dx •fJ(j),
а а
получаем оценку
(3.9)
ь ь
в которой v0 = flf(x) 1dx /1 JЛх) dx 1.
а а
Если подынтегральная функция знакопостоянна, то v0 = 1 и задача
хорошо обусловлена. Если же функция f на отрезке [а, Ь] принимает
значения разных знаков, то v0 > 1. Для некоторых сильно колеблю-
щихся (осциллирующих) около нуля функций может оказаться, что
v0 » 1 и тогда задача вычисления интеграла является плохо обуслов-
ленной.
59](https://image.slidesharecdn.com/33379-160302054853/85/33379-60-320.jpg)

![§ 3.3. Вычислительные методы
сумму, то из определения определенного интеграла следует, что Jh - 1
при h - О, т.е. метод прямоугольников сходится. .А.
Пример 3.16. Учитывая определение производной функции
f(x +h)-f(x)
f'(x) = lrm h , для ее приближенного вычисления можно
h - о
/(т + h)-f(x)
использовать формулу/' (х) "' h . Погрешность аппроксима-
ции этой формулы численного дифференцирования стремится к нулю
при h - О. .А.
Одним из распространенных методов аппроксимации является дис
кретизация - приближенная замена исходной задачи конечномерной
задачей, т.е. задачей, входные данные и искомое решение которой
могут быть однозначно заданы конечным набором чисел. Для задач,
которые не являются конечномерными, этот шаг необходим для после
дующей реализации на компьютере, так как вычислительная машина в
состоянии оперировать лишь с конечным количеством чисел. В приве
денных выше примерах 3.15 и 3.16 была использована дискретизация.
Хотя точное вычисление интеграла и предполагает использование бес
конечного множества значений f(x) (для всех х Е [а, Ь]), его прибли
женное значение можно вычислить, использовав конечное число п зна
чений в точках а + (i -l/2)h. Аналогично, задача вычисления
производной, точное решение которой предполагает выполнение опе
рации предельного перехода при h - О (а следовательно, использова
ние бесконечного множества значений функции/), сводится к прибли
женному вычислению производной по двум значениям функции.
При решении нелинейных задач широко используют различные
методы линеаризации, состоящие в приближенной замене исходной
задачи более простыми линейными задачами.
Пр им ер 3.17. Пусть требуется приближенно вычислить значение х =
= Га для а > О на компьютере, способном выполнять простейшие ариф
метические операции. Заметим, что по определению х = Ja является
положительным корнем нелинейного уравнения х 2 - а= О. Пусть x<0J-
некоторое известное приближение к Ja Заменим параболу у= х2 - а пря
мой у= (x<OJ )2- а + 2х<О>(х - х<О>), являющейся касательной, проведенной
к ней в точке с абсциссой х = x<OJ (рис. 3.4). Точка пересечения этой каса
тельной с осью Ох дает лучшее, чем x<0J, приближение и находится из
63](https://image.slidesharecdn.com/33379-160302054853/85/33379-64-320.jpg)

![§ 3.4. Корректность вычислительных алгоритмов
методов, как принято считать, возник в 1949 г., когда Дж. фон Нейман 1
и С. Улам2 использовали случайные числа для моделирования с помо
щью компьютеров поведения нейтронов в ядерном реакторе. Эти
методы могут оказаться незаменимыми при моделировании больших
систем, но подробное их изложение предполагает существенное
использование аппарата теории вероятностей и математической стати
стики и выходит за рамки данной книги.
§ 3.4. Корректность вычиспитепьных апгоритмов
1. Вычислительный алrоритм. Вычислительный метод, доведен
ный до степени детализации, позволяющий реализовать его на компью
тере, принимает форму вычислительного алгоритма.
Определим вычислительный ш~горитм как точное предписание дей
ствий над входными данными, задающее вычислительный процесс,
направленный на преобразование произвольных входных данных х (из
множества допустимых для· данного алгоритма входных данных Х)
в полностью определяемый этими входными данными результат.
Реальный вычислительный алгоритм складывается из двух частей:
абстрактного вычислительного ш~горитма, формулируемого в обще
принятых математических терминах, и программы, записанной на одном
из алгоритмических языков и предназначенной для реализации алго
ритма на компьютере. Как правило, в руководствах по методам вычисле
ний излагаются именно абстрактные алгоритмы, но их обсуждение про
водится так, чтобы выявить особенности алгоритмов, которые оказывают
существенное влияние на качество программной реализации.
2. Определение корректности алrоритма. К вычислительным
алгоритмам, предназначенным для широкого использования, предъяв
ляется ряд весьма жестких требований. Первое из них - корректность
алгоритма. Будем называть вычислительный алгоритм корректным,
если выполнены три условия:
1) он позволяет после выполнения конечного числа элементарных
для вычислительной машины операций преобразовать любое входное
данное х Е Х в результат у;
1 Джон фон Нейман (1903-1957) - американский математик, физик, инженер-изо
бретатель. Оказал значительное влияние на развитие современной lатематики. Один из
создателей первых компьютеров. Историческую справку о фон Неймане см. в (54].
2 Станислав Улам (1909-1984)-американский математик. Краткий очерк о ero дея
тельности можно найти в (54].
69](https://image.slidesharecdn.com/33379-160302054853/85/33379-70-320.jpg)
![§ 3.4. Корректность вычислительных алгоритмов
4. Вычислительная устойчивость. Из-за наличия погрешностей
округления при вводе входных данных в компьютер и при выполнении
арифметических операций неизбежно появление вычислительной
погрешности. На разных компьютерах она различна из-за различий в раз
рядности и способах округления, но для фиксированного алгоритма в
основном значение погрешности определяется машинной точностью Ем.
Назовем алгоритм вычислительно устойчивым, если вычислитель
ная погрешность результата стремится к нулю при Ем --+ О. Обычно
вычислительный алгоритм называют устойчивым, если он устойчив по
входным данным и вычислительно устойчив, и - неустойчивым, если
хотя бы одно из этих условий не выполнено.
Пр им ер 3.26.1 Пусть требуется составить таблицу значений инте-
1
гралов In = Jxn е 1 -х dx для п = 1, 2, ".на 6-разрядном десятичном ком
о
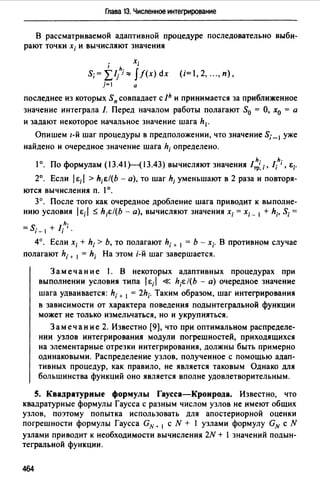
пьютере.
Интегрируя по частям, имеем
1 1 1
/п= Jxnd(-e 1 -x)=-xnel-xj~+ Je1-.td(x")=-l+ Jnx11 - 1 e1-xdx.
о о о
Следовательно, справедлива формула
Кроме того,
1
10 = J е 1 -х dx=e-1"'/~=1.71828.
о
(3.17)
Воспользуемся формулой (3.17) для последовательного вычисления
приближенных значений интегралов /п:
11"'/~=11~ -1 = 0.71828;
13 "' 1; = 31; - 1 = о.30968;
15 "'1; = 51;-1 = 0.19360;
17"'!;=11;-1 =0.13120;
19"' 1; = 91;- 1 = -0.55360;
12 "' 1; = 21~ - 1 = 0.43656;
14 "' 1; = 41; - 1 = 0.23872;
16 "'1;=61;-1 =О.16160;
fg "' 1; = 81;- 1 = 0.04960;
/ 10 "' 1~0 = 101;- 1 = -6.5360.
1 Идея примера заимствована нз [5, 106].
71](https://image.slidesharecdn.com/33379-160302054853/85/33379-72-320.jpg)
![§ 3.5. Чувствительность вычислительных алгоритмов к ошибкам округления
жется наименьшей, если суммировать числа в порядке возрастания их
значений, начиная с наименьшего.
Иногда неудачно выбранный порядок операций либо приводит к
полной потере точности, либо вообще не дает возможности получить
результат из-за переполнения.
Пр им ер 3.29. Пусть на компьютере типа IBM РС требуется вычис
лить произведение v = а0 х а1 х а2 х ... х а49 х а50, где а;"' 1025 - i. Если
производить вычисления в естественном порядке, то уже а0 х а1 "' 1044
даст значение, равное +оо. Вычисление произведения в обратном порядке
сразу же приводит к исчезновению порядка, так как а50 х а49 "' 10-49 < Х0 .
В данном случае вполне приемлем следующий порядок операций: v =
= а0 х а50 х а 1 х а49 х ... х а24 х а26 х а25, исключающий возможность
переполнения или антипереполнения. ~
2. Катастрофическая потеря точности. Иногда короткая последо
вательность вычислений приводит от исходных данных, известных
с высокой точностью, к результату, содержащему недопустимо мало
верных цифр или вообще не имеющему ни одной верной цифры.
В этом случае, как было отмечено в§ 3.2, принято говорить о катастро
фической потере точности.
Пр и мер 3.301• Известно, что функция ех может быть представлена
в виде сходящегося степенного ряда:
оо xk х2 хз
еХ=""' -=l+x+-+-+
~ k' 2' 31k=O • . •
+~+
п'.
(3.20)
Возможность вычисления значения экспоненты прямым суммиро
ванием ряда (3.20) кажется привлекательной. Пусть для вычислений
используется 6-разрядный десятичный компьютер. Возьмем х = -8.1
и будем вычислять значения частичных сумм до тех пор, пока добавле
ние очередного слагаемого еще меняет значение суммы:
е-8.1"' 1.00000 е 8.10000 Е9 32.8050 е 88.5737 Е9 179.362 е 290.566 Е9 ...
••• Е!) 16.4111 87.81941 Е!) ••• =0.000649915.
В сумму вошло 36 слагаемых и значение очередного (37-го) слагае
мого оказалось уже не в состоянии изменить результат. Можно ли счи
тать результат удовлетворительным? Сравнение с истинным значением
е-8.1 "' 0.000303539 показывает, что найденное значение не содержит ни
одной верной цифры.
'Идея примера заимствована нз [106].
75](https://image.slidesharecdn.com/33379-160302054853/85/33379-76-320.jpg)
![Глава З. Вычислительные задачи, методы и алгоритмы. Основные понятия
(для х < О) приводит к резкому ухудшению обусловленности вычисле
ний. Для х =-8.1, как в примере 3.30, имеем v15 =е 1 6 2 ~ 107• Поэтому
неудивительна полная потеря точности при вычислениях на 6-разряд
ном десятичном компьютере.
Рассмотрим теперь обусловленность алгоритма прямого вычисления
по формуле (3.21 ). При малых х вычисленные приближения с~ ~ cos х
и с;~ cos 2х содержат погрешности порядка Ем. Поэтому Л(у*} - 2Ем.
Учитывая, что у ~ 1.5х2 , находим оценку границы относительной
погрешности б (у*} - х-1 Ем. Число обусловленности v - х-1 быстро
растет с уменьшением 1х1. Уже при 1х1 .$ F,. эта оценка дает
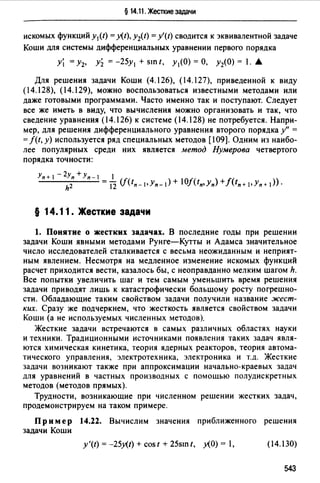
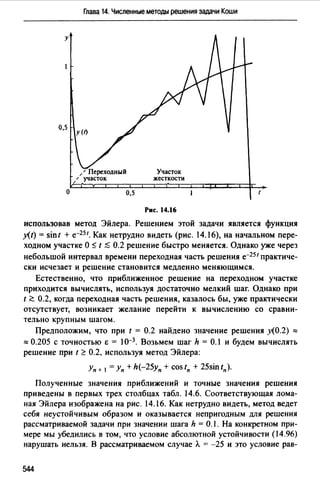
б(у*) >> 1, т.е. говорит о катострофической потере точности.
Если алгоритм, предназначенный для решения хорошо обусловленной
задачи, оказался плохо обусловленным, то его следует признать неудов
летворительным и попытаться построить более качественный алгоритм.
В примерах 3.30 и 3.31 это удалось сделать сравнительно легко.
Однако для плохо обусловленных задач дело обстоит иначе. Ключ
к пониманию дает следующее высказывание [81]: «Если задача плохо
обусловлена, то никакие усилия, потраченные на организацию изо
щренных вычислений, не могут дать правильных ответов, исключая
случайности». Здесь требуется серьезное переосмысление постановки
вычислительной задачи.
§ 3.6. Различные подходы к анализу оwибок
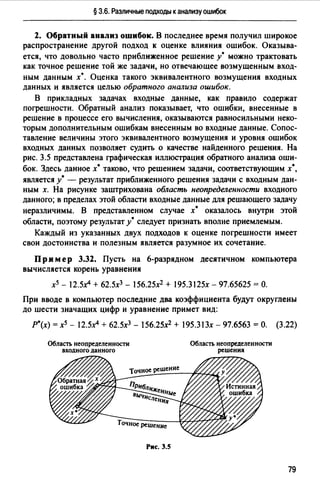
1. Прямой анализ ошибок. Общий эффект влияния ошибок обычно
учитывают следующим образом. Изучают воздействие ошибок выходных
данных, метода и округлений на получаемый результат у• и пытаются
оценить некоторую меру близости у• к истинному решению у. Такой
метод исследования называют прямым анализом ошибок. В большинстве
случаев в данной книге мы будем следовать этому традиционному пути.
Во многих (но далеко не во всех) случаях оценки погрешности удается
получить; однако довольно часто они оказываются сильно завышенными
и приводят к неоправданному пессимизму в оценке качества приближен
ного решения. Реальное значение погрешности у - у• часто значительно
меньше, чем ее оценка, рассчитанная на самый неблагоприятный случай
и выведенная с помощью прямого анализа. Особенно трудным является
прямой анализ вычислительной погрешности.
78](https://image.slidesharecdn.com/33379-160302054853/85/33379-79-320.jpg)
![Глава 3. Вычислительные задачи, методы и алгоритмы. Основные понятия
3. Противоречивость требований. Можно продолжить перечисле
ние требований к вычислительным алгоритмам, добавив, например
требования универсальности и гибкости. Однако нетрудно понять, что
сформулированные требования противоречивы. Большинство из них
вступает в противоречие с экономичностью, выраженной через затраты
машинного времени. В разных ситуациях на первый план может высту
пать то или иное требование и, удовлетворяя в большей степени одним
требованиям, программа с неизбежностью в меньшей степени удовле
творяет другим. Это частично объясняет наличие большого числа про
грамм, предназначенных для решения одной и той же задачи.
Естественно, что хорошая программа, которую можно предъявить
для широкого использования, не может быть простой. Следует при
знать, что составление таких программ - это работа, требующая высо
кой квалификации и специальных знаний. Ее выполняют специалисты
по созданию математического обеспечения компьютеров. Рядовой
пользователь должен по возможности стремиться максимально исполь
зовать стандартные программы, а не создавать новые.
§ 3.8. Допопнитепьные замечаниw
Учебные пособия [97, 37] можно рассматривать как введение в тео
рию методов решения некорректных задач. Их удачно дополняют сле
дующие книги [7, 72, 98]. Отметим, что [98] содержит не только теорию
и алгоритмы, но и тексты соответствующих программ.
2 Весьма содержательное изложение проблемы обусловленности
вычислительных задач и обратного анализа ошибок содержится в (81).
Здесь же подробно обсуждаются проблема создания высококачествен
ного математического обеспечения и требования, предъявляемые к
вычислительным алгоритмам.
86](https://image.slidesharecdn.com/33379-160302054853/85/33379-87-320.jpg)
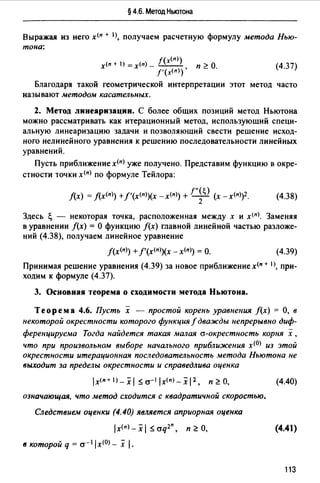
![Глава 4. Методы отыскания решений нелинейных уравнений
у
х
Рис. 4.1
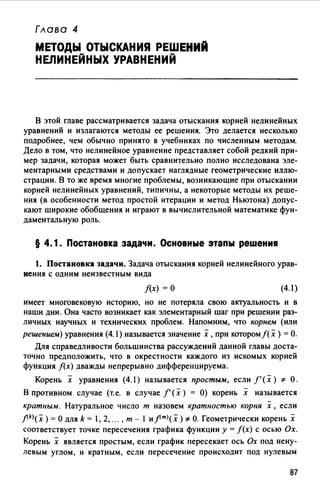
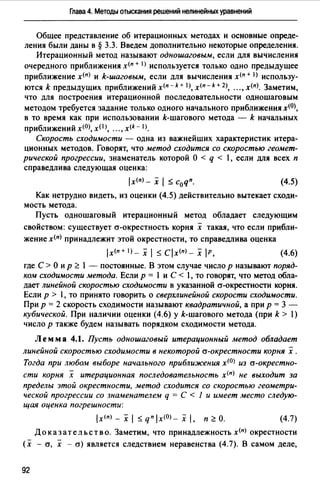
углом. Функция f(x), график который изображен на рис. 4.1, имеет
четыре корня. Корни х 1 и х3 - простые, х2 и х4 - кратные.
Задача отыскания простых корней является существенно более
простой (и чаще встречающейся), чем задача отыскания кратных кор
ней В действительности большинство методов решения уравнения
(4.1) ориентировано именно на вычисление простых корней.
2. Уточнение постановки задачи. В конкретной задаче часто инте
рес представляют не все корни уравнения, а лишь некотор1;.1е из них.
Тогда постановку задачи уточняют, указывая на то, какие из корней
подлежат определению (положительные корни, корни из заданного
интервала, максимальный из корней и т.д.).
В подавляющем большинстве случаев представить решение уравне
ния (4.) в виде конечной формулы оказывается невозможным. Даже
для простейшего алгебраического уравнения п-й степени
(4.2)
явные формулы, выражающие его корни через коэффициенты с помо
щью конечного числа арифметических операций и операций извлече
ния корней степени не выше п, найдены 1 лишь при п = 2, 3, 4. Однако
уже для уравнений пятой и более высоких степеней таких формул не
существует. Этот замечательный факт, известный как теорема Абеля,
был установлен в 30-е годы XIX в. Н. Абелем 2 и Э. Галуа 3.
1 Алгебраические уравнения третьей и четвертой степеней не поддавались усилиям
математиков около 2000 лет. Эту задачу решили итальянские математики эпохи Ренес
санса Сципион дель Ферро (1456-1526), Никколо Тарталья (1500--1557), Джироламо
Кардано (1501-1576), Людовико Феррари (1522-1565).
2 Нильс Хенрик Абель (1802-1829) - норвежский математик. Теорема, о которой
идет речь, была доказана им в возрасте около 22 лет.
3 Эварист Га ~уа (1811-1832) - французский математик, один из создателей теории
групп. Убит на дуэли в возрасте 21 года. Краткий очерк о его жизни см. в [54].
88](https://image.slidesharecdn.com/33379-160302054853/85/33379-89-320.jpg)
![Глава 4. Методы отыскания решений нелинейных уравнений
Локализация корней. Отрезок [а, Ь], содержащий только один
корень х уравнения (4.1 ), называют отрезко.u локализации корня х.
Цель этапа локализации считают достигнутой, если для каждого из
подлежащих определению корней удалось указать отрезок локализации
(его длину стараются по возможности сделать минимальной).
Прежде чем переходить непосредственно к отысканию отрезков
локализации, имеет смысл провести предварительное исследование
задачи для выяснения того, существуют ли вообще корни уравнения
(4.1 ), сколько их и как они расположены на числовой оси.
Способы локализации корней многообразны, и указать универсаль
ный метод не представляется возможным. Иногда отрезок локализации
известен либо он определяется из физических соображений. В простых
ситуациях хороший результат может давать графический метод (см. при
мер 4.2). Широко применяют построение таблиц значений функций f
вида У;= f(x; ), i = 1, 2, ..., п. При этом способе локализации о наличии на
отрезке [х; _1, х;] корня судят по перемене знака функции на концах
отрезка (см. пример 4.3). Основанием для применения указанного спо
соба служит следующая хорошо известная теорема математического ана
лиза.
Теорема 4.1. Пусть функция/непрерывна на отрезке [а, Ь] и при
нимает на его концах значения разных знаков, т.е. f(a) · f(b) < О. Тогда
отрезок [а, Ь] содер:ж:ит по крайней мере один корень уравнения f(x) =О. •
К сожалению, корень четной кратности не удается локализовать на
основании перемены знака с помощью даже очень подробной таблицы.
Дело в том, что в малой окрестности такого корня (например, корня х 2
на рис. 4.1) функция f имеет постоянный знак.
Важно подчеркнуть, что далеко не всегда для успешного отыскания
корня х уравнения (4.1) необходимо полное решение задачи локализа
ции. Часто вместо отрезка локализации достаточно найти хорошее
начальное приближение х<О) к корню х .
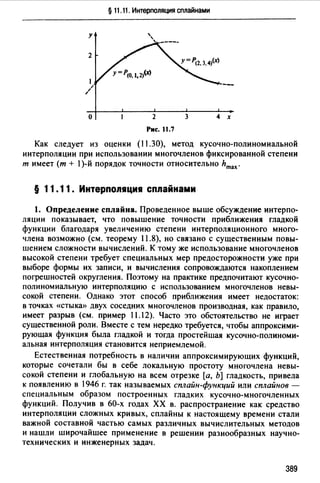
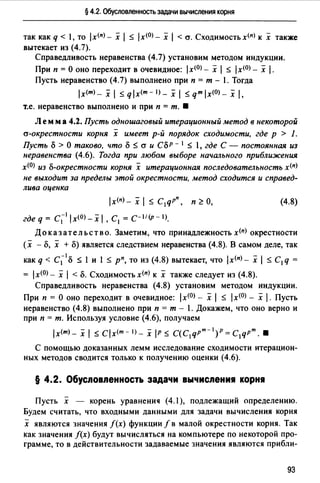
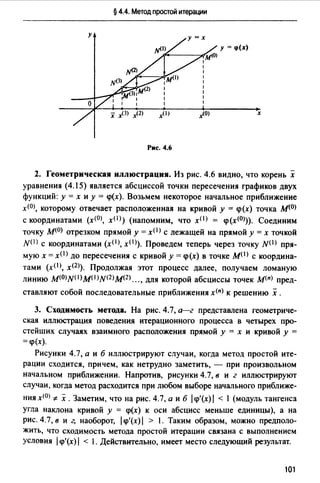
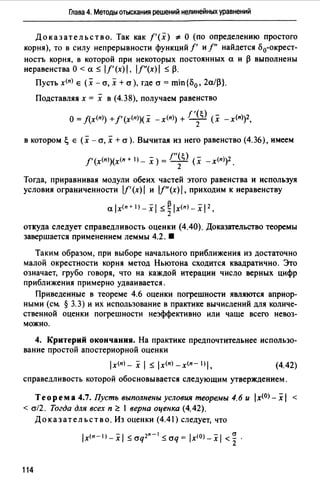
Пр им ер 4.2. Локализуем корни уравнения
4(1-х 2 )-ех=о. (4.4)
Для этого преобразуем уравнение к виду 1 - х2 = 0.25 ех и построим
графики функций у = 1 - х2 и у = 0.25 еХ (рис. 4.2). Абсциссы точек
пересечения этих графиков являются корнями данного уравнения. Из
рис. 4.2 видно, что уравнение имее'f два корня х 1 и х2 , расположенные
на отрезках [-1, О] и [О, 1]. Убедимся, что функция f(x) = 4(1 - х2)- ех
90](https://image.slidesharecdn.com/33379-160302054853/85/33379-91-320.jpg)
![§ 4.1. Постановка задачи. Основные этапы решения
у
х
Рис. 4.2
принимает на концах указанных отрезков значения разных знаков. Дей
ствительно, /(-1) = -е-1 <О, /(О)= 3 >О, /(1) =-е <О.
Следовательно, в силу теоремы 4.1 на каждом из отрезков [-1, О]
и [О, 1] находится по крайней мере один корень. •
Пр им ер 4.3. Локализуем корни уравнения
хз - l.lx2- 2.2х + 1.8 =О.
Для этого составим таблицу значений функции f(x) = хз - l. Jx2 -
- 2.2х + 1.8 на отрезке [-2, 2] с шагом 0.4 (табл. 4.1 ).
Таблица 4.1
х -2.0 -1.6 -1.2 -{),8 -{).4 О.О
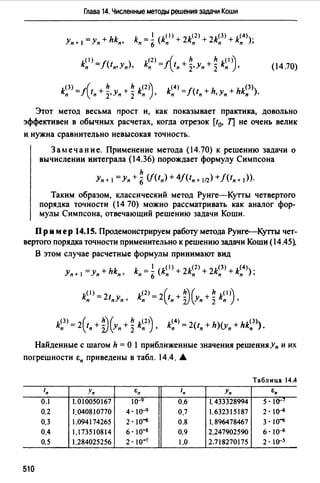
f(x) -6.200 -1.592 1.128 2.344 2.440 1.800
Продолжение табл. 4. 1
х 0.4 0.8 1.2 1.6 2.0
f(x) 0.808 -0.152 -0.696 -0.440 1.000
Из таблицы видно, что функция f меняет знак на концах отрезков
[-1.6, -1.2], [0.4, 0.8], [1.6, 2.0]. Теорема 4.1 дает основание утверждать,
что каждый из этих отрезков содержит по крайней мере один корень.
Учитывая, что в силу основной теоремы алгебры многочлен третьей
степени не может иметь более трех корней, заключаем, что полученные
три отрезка содержат ровно по одному корню. Таким образом, корни
локализованы. •
Итерационное уточнение корней. На этом этапе для вычис
ления каждого из корней с точностью Е > О используют тот или иной
итерационный метод, позволяющий построить последовательность
х<0>, хО>, "., х<11>, ".приближений к корню х.
91](https://image.slidesharecdn.com/33379-160302054853/85/33379-92-320.jpg)

![§ 4.3. Метод бисекции
ситуации вычисления следует прекратить и считать, что получен мак
симум действительно возможного.
Для большинства итерационных методов определить этот момент
можно, поскольку начиная с него поведение приближений х<п) стано
вится крайне нерегулярным. Если вдали от интервала неопределенно
сти величина
lx(n) _x(n-1)1
q(n) = -'------'-
1х<п-1) - х<п - 2) 1
(4.12)
обычно бывает меньше единицы ( /х<п) - х<п - I) 1 < 1х<п - 1>- х<п - 2) 1), то
появление при некотором п значения q<11J > 1 свидетельствует, скорее
всего, о начале «разболтки» - хаотического поведения итерационной
последовательности. В этой ситуации вычисления имеет смысл пре
рвать, чтобы выяснить причину явления и принять правильное реше
ние. Лучшим из полученных приближений к решению следует считать,
конечно, х<п - 1J. Использование для контроля вычислений величины
(4.12) называют часто правилом Гарвика.
§ 4.3. Метод бисекции
1. Описание метода. Пусть требуется с заданной точностью Е > О
найти корень х уравнения (4.1). Отрезок локализации (а, Ь] (т.е. отре
зок, содержащий только один корень х) будем считать заданным.
Предположим, что функция/непрерывна на отрезке (а, Ь] и на его кон
цах принимает значения разных знаков, т.е.
f(a)f(b) <О. (4.13)
На рис. 4.5 изображен случай, когда /(а)< О и /(Ь) >О.
Для дальнейшего будет удобно обозначить отрезок [а, Ь] через
[а<0>, ь<0>]. Примем за приближенное значение корня середину отрезка -
Рис. 4.5
97](https://image.slidesharecdn.com/33379-160302054853/85/33379-98-320.jpg)
![Глава 4. Методы отыскания решений нелинейных уравнений
точку x<OJ = (a<OJ + ь<О>)/2. Так как положение корня х на отрезке
[a<OJ, ь<0>] неизвестно, то можно лишь утверждать, что погрешность
этого приближения не превышает половины длины отрезка (рис. 4.5):
lx(O) - х 1 ~ (Ь(О) _ а<О>)/2.
Уменьшить погрешность приближения можно, уточнив отрезок
локализации, т.е. заменив начальный отрезок [а<0>, ь<0>] отрезком
[аО>, ь<I)] меньшей длины. Согласно методу бисекции (половинного
деления) в качестве [aOJ, ь< 1 >] берут тот из отрезков [а<О>, х<О>] и [х<О>,
ь<0>], на концах которого выполняется условие /(a(l>)f(b<1>) ~ О. Этот
отрезок содержит искомый корень. Действительно, если fla(l>)flb(I)) <О,
то наличие корня следует из теоремы 4.1; если же f(a(l>)f(bO>) =О, то
корнем является один из концов отрезка. Середина полученного
отрезка x(I) = (a(I) + ЬО>)/2 дает теперь приближение к корню, оценка
погрешности которого составляет
lx<1>- х 1 ~ (b(l)_a(l>)/2 = (Ь - а)/22 •
За очередное уточнение отрезка локализации [ащ, ь<2>] снова берут
тот из отрезков [a(I>, x(I>], [х< 1 >, ь(I>], на концах которого выполняется
условие f(a<2>)f(b<2>) ~ О.
Опишем очередную (п + 1)-ю итерацию метода. Пусть отрезок
[а<п>, ь<п>] уже найден и вычислены значения х<п>, f(а<п>), f(Ь<п>). Тогда
производят следующие действия:
1°. Вычисляют f(x(n) ).
2°. Если f(a<n>)f(x<n>) ~ О, то в качестве отрезка локализации
[а<п+ 1), ь<п+ 1)] принимают отрезок [а<п>, х<п>]. в противном случае
f(x(n))f(b(n>) <о и за [а<п + 1>, ь<п +I)] принимают отрезок [х<п>, ь<п>].
3°. Вычисляют х<п + 1>= (а<п +I) + ь<п + 1))/2.
Неограниченное продолжение итерационного процесса дает после
довательность отрезков [а(О), Ь(О)], (a(I), b(I)], "., [а<п>, Ь(п)], .",содержа
щих искомый корень. Каждый из них (за исключением начального)
получен делением пополам предыдущего отрезка.
2. Скорость сходимости. Середина п-го отрезка - точка х<п> =
= (а<п> + ь<п>)/2 дает приближение к корню х, имеющее оценку погреш
ности
(4.14)
Из этой оценки видно, что метод бисекции сходится со скоростью
геометрической прогрессии, знаменатель которой q = 1/2. По сравне
нию с другими методами метод бисекции сходится довольно медленно.
98](https://image.slidesharecdn.com/33379-160302054853/85/33379-99-320.jpg)
![§4.3. Метод бисекции
Однако он очень прост и весьма непритязателен; для его применения
достаточно, чтобы выполнялось неравенство (4.13), функция f была
непрерывна и верно определялся ее знак. В тех ситуациях, где не нужна
сверхвысокая скорость сходимости (а это часто имеет место при про
стых прикладных расчетах), этот метод весьма привлекателен.
Заметим, что число итераций, которое требуется при применении
метода бисекции для достижения разумной точности Е, не может быть
очень большим. Например, для уменьшения первоначального отрезка
локализации в 106 раз нужно 19 итераций.
3 а меч ан и е. Интересно, что при выполнении условия (4.13)
метод бисекции сходится даже, если на отрезке [а, Ь] находится не
один, а несколько корней уравнения f(x) = О. В результате приме
нения метода будет найден один из этих корней.
3. Критерий окончания. Итерации следует вести до тех пор,
пока не будет выполнено неравенство ь<п> - а<п> < 2Е. При его выпол
нении в силу оценки (4.14) можно принять х<п> за приближение к
корню с точностью Е.
Пр им ер 4.4. Найдем методом бисекции с точностью Е = 10-2 поло
жительный корень уравнения 4( 1 - х2) - ех = О.
В примере 4.2 этот корень был локализован на отрезке [О, 1], причем
/(0) > О, f( 1) < 0. Положим а(О) = 0, Ь(О) = 1, х(О) = (а(О) + Ь(О))/2 = 0.5.
1-я итерация. Вычисляемf(х<0>):::: 1.3512. Так какf(а(О))j(х<0>) >О,
то за очередной отрезок локализации принимаем [а(!>, b(I)] = [0.5, 1].
Вычисляем x(IJ = (а< 1 1 + b(I >)/2 = 0.75.
2-я итерация. Вычисляемf(хО>) ::::-0.3670. Так какf(аО>)J(хО>) <
<О, то [а<2), Ь(2)] = [0.5, О. 75] и х<2) = (а<21 + Ь(21)/2 = 0.625.
Результаты следующих итераций (с четырьмя цифрами после деся
тичной точки) приведены в табл. 4.2.
Таблица 4.2
Номер ите- Знак
a(n) Ь(•) _x{n) л:х<•)> Ь(п) _ a(n)
рации k f(d")) f(b("))
о 0.0000 1.0000 + - 0.5000 1.3513 1.0000
1 0.5000 1.0000 + - 0.7500 -0.3670 0.5000
2 0.5000 0.7500 + - 0.6250 0.5693 0.2500
3 о 6250 0.7500 + - 0.6875 0.1206 0.1250
4 0.6875 0.7500 + - 0.7187 -0.1182 0.0625
5 0.6875 0.7187 + - 0.7031 0.0222 0.0312
6 0.7031 0.7187 + - 0.7109 - 0.0156
99](https://image.slidesharecdn.com/33379-160302054853/85/33379-100-320.jpg)
![Глава 4. Методы отыскания решений нелинейных уравнений
При п = 6 имеем Ь(б) -а<б)"' 0.0156 < 2 • 10-2. Следовательно, задан
ная точность достигнута и можно принять х :::ох<6>. Окончательно полу
чим х = 0.71 ±О.О . .А
4. Влияние вычислительной погрешности. При использовании
метода бисекции принципиально важным является правильное опреде
ление знака функции f В случае, когда х<п> попадает в интервал неоп
ределенности корня (см. § 4.2), знак вычисленного значения] (x<n>) не
обязан быть верным, и последующие итерации не имеют смысла.
Однако этот метод следует признать очень надежным; он гарантирует
точность приближения, примерно равную радиусу интервала неопреде-
ленности &. Как было отмечено в § 4.3, большего требовать нельзя.
§ 4.4. Метод простой итерации
1. Описание метода. Чтобы применить метод простой итерации
для решения нелинейного уравнения (4.1 ), необходимо преобразовать
это уравнение к следующему виду:
х = <р(х). (4.15)
Это преобразование (приведение уравнения к виду, удобному для итера
ций) можно выполнить различными способами; некоторые из них будут
указаны ниже. Функцию <р далее будем называть итерационной функ
цией.
Выберем каким-либо образом приближенное значение корня х<0>
и подставим его в правую часть уравнения (4.15). Получим значение
х< 1 > = <р(х<0>). Подставляя теперь х< 1 > в правую часть уравнения (4.15),
имеем х<2> = <р(х< 1 >). Продолжая этот процесс неограниченно, получаем
последовательность приближений к корню, вычисляемых по формуле
х<п + 1) = <p(x<n>), п ~ О. (4.16)
Очевидно, что метод простой итерации - одношаговый (см. § 4.1).
Если существует предел построенной последовательности х =
lim х<п), то, переходя к пределу в равенстве (4.16) и предполагая
функцию <р непрерывной, получаем равенство
х=<р(х).
Это значит, что х - корень уравнения (4.15).
100
(4.17)](https://image.slidesharecdn.com/33379-160302054853/85/33379-101-320.jpg)

![Глава 4. Методы отыскания решений нелинейных уравнений
Если это условие выполнено, то найденное значение х<п> является при
ближением к х с точностью Е.
Пр им ер 4.5. Используем метод простой итерации для вы числе
ния положительного корнях уравнения4(1 -х 2)-ех =О с точностью
Е = 10-4• Результат примера 4.4 дает для корня отрезок локализации
[а, Ь] = (0.70, 0.72).
Преобразуем уравнение к виду (4.15), где q>(x) = J1- ех/ 4. Заме
тим, чтоq>'(х) = -ex/(8JI -ex/4),q>"(x) =-ex(1-ex/8)/(8J1 -ех/4)3 .
Так как q>" < О на [а, Ь], то производная q>' монотонно убывает и q =
= maxlq>'(x)I =q>'(b)"" 0.37. Следовательно, условие сходимости (4.18)
[а,Ь]
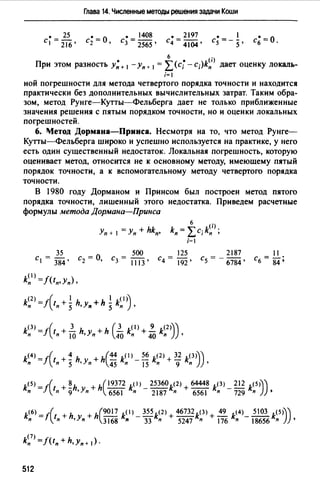
выполнено. Возьмем х<0> = О.7 и будем вести итерации до выполнения
критерия (4.23). В табл. 4.3 соответствующие приближения приведены
с десятью знаками мантиссы.
п
о
2
3
4
5
х<п)
0.7000000000
0.7046714292
о.7029968319
0.7035984939
о. 7033824994
0.7034600632
Таблица 4.3
3. 10-з
1·10-3
4· J0--4
2· 10--4
5 • 10-5
Критерий окончания выполняется при п = 5. После округления зна
чения х<5> до четырех значащих цифр получим х = О.7035 ± О.ООО1. .&
104
Замечание. Часто в практике вычислений вместо критерия
(4.23) используется привлекательный своей простотой критерий
lx(n)_x(n-) 1 <Е. (4.24)
В случае О < q ~ 1/2 использование критерия (4.24) оправдано.
Действительно, здесь (1 - q)/q ~ 1 и поэтому выполнение неравен
ства (4.24) влечет за собой выполнение неравенства (4.23).
В то же время при 1/2 < q < 1 использование критерия (4.24)
может привести к преждевременному прекращению итераций.
Дело в том, что когда значение величины q близко к единице, ите
рационный процесс сходится медленно и расстояние между двумя
последовательными приближениями х<п) и х<п - I) не характеризует
расстояние от х<пl до решения х (рис. 4.8).](https://image.slidesharecdn.com/33379-160302054853/85/33379-105-320.jpg)

![Глава 4. Методы отыскания решений нелинейных уравнений
где ~(п) - промежуточная между х<п - I) и х<п - 2> точка, имеем
x<n) _x(n-1) - _
(i(n) = <р'(~(п)):::;<р'(х).
х<п-1>-х<п-2)
Таким образом, в равенстве (4.22) можно положить а<п> "" (i<п> и
поэтому при определенных условиях можно использовать следующий
практический критерий окончания итерационного процесса:
lх<п>-х<п-1)1~11 ::a<n)IE.
а(п)
S. Дополнительные сведения о характере сходимости. Когда про
изводная <р' знакопостоянна на отрезке локализации, итерационная
последовательность обладает некоторыми полезными дополнитель-
ными свойствами. Заметим, что при <р'(х) * О в достаточно малой
окрестности корня знак производной <р'(х) действительно постоянен.
Теорем а 4.4. Пусть [а, Ь] - отрезок локализации корня уравнения
(4.15). Предположим, что на этом отрезке функция <р непрерывно
дифференцируема, а ее производная <р'(х) знакопостоянна и удовлетво
ряет неравенству (4.18) при О< q < 1. Пусть х<0> Е [а, Ь] - произволь
ное начальное приближение и при <р' < О выполнено дополнительное
условие х< 1 > = <р(х<0>) Е [а, Ь] (первое приближение не выходит за пре
делы отрезка локализации).
Тогда итерационная последовательность не выходит за пределы
отрезка [а, Ь], метод простой итерации сходится и верны оценки погреш
ности (4.19), (4.21). Краме того, справедливы следующие свойства:
1°. Если <р' >О на [а, Ь], тох<п) сходится к х, монотонно возрастая
при а ~ х<О) < х ,и монотонно убывая при х < х<О) ~ Ь.
2°. Если <р' <О на [а, Ь], то сходимостьх<п) к х носит колебатель
ный характер, т.е. при всех п ~ О значения х<п) и х<п + 1) расположены
по разны1: стороны от х, причем последовательности приближений
с четными и нечетными номерами сходятся к х монотонно. В этом
случае верна апостериорная оценка погрешности
lx(n)_ х 1 ~ lx<nJ_x(n- l)I, п ~ 1 (4.25)
и справедлив критерий (4.24) окончания итерационного процесса.
Мы не будем приводить здесь полное доказательство теоремы. Оно
основано на использовании равенства (4.20), установленного при доказа
тельстве теоремы 4.2. Докажем только справедливость свойств 1° и 2°.
106](https://image.slidesharecdn.com/33379-160302054853/85/33379-107-320.jpg)
![§ 4.4. Метод простой итерации
Доказательство. Если О < q>' ::; q, то знаки величин х<п> - х
и х<п - I) - х совпадают, в то время как lx(n)_ х 1::; q /х<п- I) _ х 1. Сле
довательно, последовательность монотонно приближается к х с той
стороны, где лежит х<0>. Если же -q < q>' <О, то из равенства (4.20) сле
дует, что знаки величин х<п> - х и х<п - 1>- х различны. Это подтвер
ждает колебательный характер сходимости. •
Замечание. Монотонный и колебательный характер сходимо
сти итерационной последовательности, указанные в теореме 4.4,
иллюстрируют соответственно рис. 4.7, а и 6.
6. Приведение уравнения к виду, удобному для итераций. Клю
чевой момент в применении метода простой итерации - эквивалент
ное преобразование уравнения (4.1) к виду (4.15). Конечно, такое пре
образование имеет смысл только тогда, когда оказывается
выполненным условие (4.18) с О< q < 1. Укажем один из простых спо
собов такого преобразования.
Предположим, что производная f' на отрезке [а, Ь] непрерывна
и положительна. Тогда существуют положительные постоянные т и М
такие, что О< т::; f(x)::; М, хе [а, Ь]. Приведем уравнение (4.1) к виду
х = х - af(x), (4.26)
где а > О. Здесь итерационная функция q> имеет вид q>(x) = х - af(x).
Как выбрать а, чтобы выполнялось условие (4.18), причем q было бы
по ВОЗМОЖНОСТИ минимальным?
Заметим, что 1 - аМ ::; q>'(x) = 1 - af' (х) ::; 1 - ат и поэтому
lч>'(x)I::; q(a) = max{ l 1-aMI, l I -aml }. Для того чтобы было выпол
нено неравенство q(a) < 1, достаточно взять любое а е (0,2/М). Кон
кретный выбор параметра а зависит от наличия информации о числах т
и М. Если известны обе эти величины, то лучшим является выбор а =
=а 0 = 2/(М+ т). В этом случае q(a0 )=(M-m)/(M+ т). Если же известно
только М, то можно положить а= а 1 = IM. В этом случае q (а1 )= 1- т!М.
Кроме того, при а= а 1 производная q>'(x) неотрицательна, и в силу тео
ремы 4.3 сходимость является монотонной.
1
3 а меч ан и е. Случай, когда производная f' отрицательна, сво
дится к рассмотренному выше умножением уравнения f(x) = О на -l.
Пример 4.7. Для решения задачи, поставленной в примере 4.5,
можно воспользоваться преобразованием уравнения (4.4) к виду
(4.26). Будем считать известным, что х е [О. 70, О. 72]. Так как на
отрезке локализации выполнено условие (4(1 - х2)- еХ)' =-8х - еХ <О,
107](https://image.slidesharecdn.com/33379-160302054853/85/33379-108-320.jpg)
![Глава 4. Методы отыскания решений нелинейных уравнений
то перепишем уравнение в видеfj(х) =О, гдеfj(х) = е'" - 4(1 - х2). Тогда
fj (х) = е'" + 8х и для х е [О. 70, О. 72) верны оценки О < т = fj (О. 70) s
s fi (х) $ fj (0.72) = М. Выберем в уравнении (4.26) а= 2/(т + М), возь
мемх<0> = 0.7 и будем вести итерации по формулех<п + 1) =x(n) - а[е·«п> -
- 4(1 - (х<11>) 2 )]. Выбранному а соответствует q =(М- т)!(М+ т)""
"" О.О 13 и поэтому сходимость должна быть более быстрой, чем в при
мере 4.6. Действительно, уже первая итерация дает хО> = О.7034025118,
и так как _q_ lx<1>- х<0> 1 "" 5 • 10-5, то итерации следует прекратить
1-q
и считать х = 0.7034 ±О.ООО. А.
§ 4.5. Обусповnенность метода простой итерации
В § 4.4 метод простой итерации был рассмотрен при идеальном
предположении о возможности точного вычисления значений функции
<р(х). В действительности же вычисления на компьютере дают прибли
женные значения <р•(х). Поэтому вместо последовательности x<n>, удов
летворяющей равенству х<11 + l) =<р(х(11>), получается последовательность
:Х<11>, для которой
(4.27)
Известно, что метод простой итерации и многие другие итерацион
ные методы устойчивы к ошибке, допущенной на одной из итерации.
Такая ошибка эквивалентна некоторому ухудшению очередного при
ближения; если она не вывела приближение за пределы области сходи
мости, то итерационная последовательность по-прежнему будет схо-
диться к решению х ,а внесенная погрешность - затухать. Поэтому о
таких итерационных методах говорят, что они обладают свойством
самоисправляемости.
Однако погрешности допускаются не на одной, а на всех итерациях
и совокупное их влияние несколько иное.
1. Обусловленность задачи. Прежде чем сформулировать резуль
тат о поведении метода простой итерации при наличии погрешности в
вычислении функции <р, отметим, что преобразование уравнения f(x) = О
к виду х = <р(х) изменяет обусловленность задачи. Запишем это уравне-
- -ние в виде f(x) =О, где f(x) = х - <р(х), и воспользуемся результатами
§4.2. Заметим, что ЛJ')=Л(<р'), поскольку в действительности при-
108](https://image.slidesharecdn.com/33379-160302054853/85/33379-109-320.jpg)


![Глава 4. Методы отыскания решений нелинейных уравнений
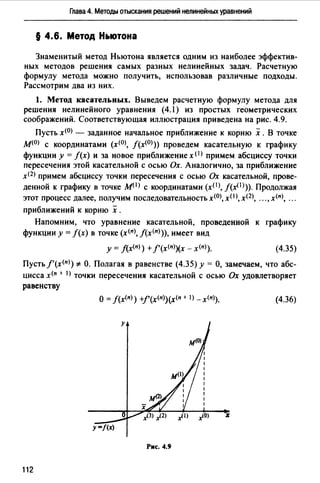
Пр им ер 4.9. Используя метод Ньютона, укажем итерационный
процесс вычисления PJa, где а > О, р - натуральное число.
По определению, х = PJa - это неотрицательная величина, удовле
творяющая равенству хР = а. Таким образом, задача сводится к вычис
лению положительного корня уравнения f(x) = О, где /(х) = хР - а.
Итерационная формула метода Ньютона примет вид
(х<">)Р - а - 1
х<" + 1) =х<п) - =Р__ х(п) + а (4.44)
р(х<">)Р - 1 р p(x<n>)p-1
При р = 2 эта формула уже была получена в примере 3.17. А
5. Связь с методом простой итерации. Метод Ньютона можно рас
сматривать как один из вариантов метода простой итерации, связанный
со специальным преобразованием уравнения f(x) =О к виду
х = q>н(х), (4.45)
где q>н(х) = х - f(x)/f'(x).
Действительно, итерационная формула метода простой итерации
.x(n+ 1) = q>н(х<")) совпадает с (4.37).
Если исходить из этого с учетом оценки (4.19), можно сделать вывод
о том, что метод Ньютона сходится только линейно. Однако заметим,
f"(x)
что q>Л, (х) =f(x) ---2 • Так как f(x) = О, то q>Л,(х) = О и величина
(f'(x))
а<п + I) = 1q>'(~<11))1. определяющая в силу равенства (4.20) коэффициент
сжатия погрешности, стремится к нулю при п ---+ оо. Скорость сходимо
сти возрастает по мере приближения к корню, отсюда и ее сверхлиней
ный характер.
В качестве аналога теоремы 4.4 для метода Ньютона приведем сле
дующий результат.
Теорема 4.8. Пусть [а, Ь] - отрезок локализации простого корня
х уравнения (4.1). Предположим, что на этам отрезке функция f два
жды непрерывно дифференцируема, а ее производные/'(х) иf''(х) знако
постоянны. Пусть х<О) е [а, Ь] - произвольное начальное приближение,
и в случае f(x<0))f'(x<0)) < О выполнено дополнительное условие x<I) е [а,
Ь] (первое приближение не выходит за пределы отрезка локализации).
Тогда начиная с п = l итерационная последовательность метода
Ньютона х<11) сходится к х монотонно с той стороны отрезка [а, Ь],
где f(x)f"(x) > О. •
116](https://image.slidesharecdn.com/33379-160302054853/85/33379-117-320.jpg)
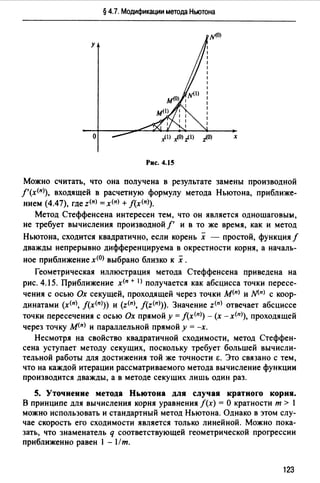
![§ 4.7. Модификации метода Ньютона
т.е. исходное нелинейное уравнение заменяется приближенно более
простым линейным уравнением.
l. Упрощенный метод Ньютона. Если производная f'(x) непре
рывна, то ее значение вблизи простого корня х почти постоянно.
Поэтому можно попытаться вычислить/' лишь однажды в точке х<0>, а
затем заменить в формуле (4.37) значение f' (х<п>) постоянной f'(x<0>). В
результате получим расчетную формулу упрощенного метода Ньютона:
х<п + 1) = х<п> - f(х<п>) ' п ~о. (4.46)
f'(x(O))
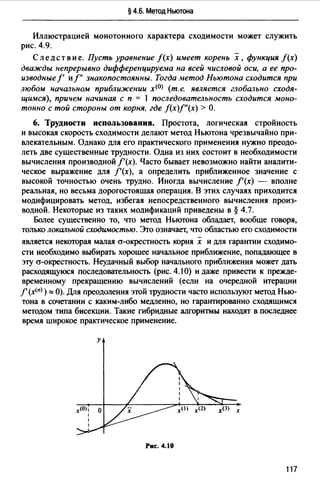
Геометрическая иллюстрация метода приведена на рис. 4.11. В точке
(x<OJ, f(x<O>)) к графику функции у = f(x) проводится касательная /0 и за
приближение xm принимается абсцисса точки пересечения этой каса
тельной с осью Ох (как в методе Ньютона). Каждое следующее прибли
жениех<п + 1>получается здесь как абсцисса точки пересечения с осью Ох
прямой, проходящей через точку М(п> с координатами (х<п>, f(х<п> )) и
параллельной касательной /0 •
Упрощение вычислений по сравнению с методом Ньютона достига
ется здесь ценой резкого падения скорости сходимости. Сходимость
этого метода является уже не квадратичной, а линейной.
Метод (4.46) можно рассматривать как метод простой итерации
с итерационной функцией <р(х) =х - f(x<~> . Так как <р'(х) = 1 - f'(<x]>),
J'(x ) f'(x
то для знаменателя q соответствующей геометрической прогрессии
имеем q "' l 1 - ;~~~~)1 · Следовательно, скорость сходимости тем выше,
чем ближе начальное приближение х<0> к решению х .
у
о х
Рие. 4.11
119](https://image.slidesharecdn.com/33379-160302054853/85/33379-120-320.jpg)



![Глава 4. Методы отыскания решений нелинейных уравнений
у у
о х х о х х
Рис. 4.16
Для того чтобы сохранить квадратичную скорость сходимости,
метод Ньютона нужно модифицировать следующим образом:
f(x<n))
х<п+l)=х<п>-т--- п~О.
f'(х<п))'
(4.51)
Можно показать (это достигается раскрытием неопределенностей
с помощью формулы Тейлора), что при таком выборе итерационной
функции q>(x) = х - т f((x)) получим q>'(x) =О, и сходимость снова ока
/' х
жется квадратичной.
На рис. 4.16, а, б проиллюстрировано поведение последовательных
приближений стандартного метода Ньютона и его модификации (4.51)
для случая отыскания корня кратности т = 2.
Для метода (4.51) значение х<п + I) получается следующим образом.
В точке м<п) с координатами (х<п>, j(х<п>)) к графику функции прово
дится касательная. Пересечение ее с осью Ох дает вспомогательную
точку :Х<п+ I). Для получения точки х<п + I) нужно воспользоваться
равенством х<п + 1J - х<п) = т( х (п + 1) - x<n>).
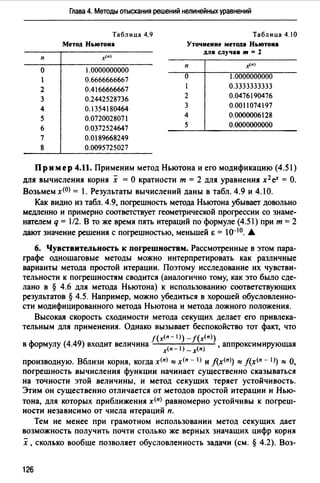
Пр им ер 4.10. Применим методы, рассмотренные в данной главе,
для вычисления положительного корня уравнения 4(1 - х2) - еХ = О, счи
тая известным, что х Е [О, 1] (см. пример 4.2).
Результаты вычислений приведены в табл. 4.5-4.8. В них для каж
дого приближения дается число верных знаков и требуемое число вычис
лений значений функции /(х) = 4(1 - х2 ) - еХ (для упрощенного метода
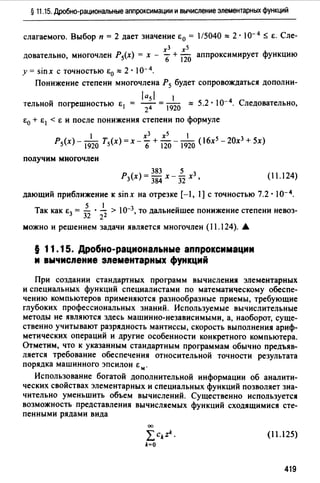
124](https://image.slidesharecdn.com/33379-160302054853/85/33379-125-320.jpg)

![§ 4.8. Дополнительные замечания
можная (но не обязательная) потеря точности составляет одну-две вер
ные цифры. Необходимо лишь прервать итерационный процесс в тот
момент, когда приближения окажутся в опасной близости к интервалу
неопределенности. Один из способов заметить этот момент состоит
в использовании правила Гарвика (см. § 4.2).
Отметим, что при попадании очередного приближения в малую
окрестность решения теряет устойчивость и метод Стеффенсена.
§ 4.8. Допопнитепьные замечани1
1. Метод обратной квадратичной интерполяции. Пусть приближе
ния х<п - 2), х<п - 1>, х<п) уже найдены, а соответствующие значения функ
ции f различны (последнее предположение заведомо будет выполнено,
если функция/строго монотонна). Тогда строят такой квадратичный мно
гочлен Р2(у) от переменной у, что х<1) = P 2(f(x(r))) для i = п - 2, п - 1, п.
За очередное приближение к решению принимается х<п + I) =Р2(0).
Этот трехшаrовый метод обладает локальной сходимостью с поряд
ком р "" 1.839; для начала ero работы требуется задание трех хороших
начальных приближений.
2. Методы с порядком сходимости выше второrо. Приведем при
меры одношаrовых методов, обладающих кубической сходимостью.
Таковым является итерационный метод1
Здесь
_ /(х)
и(х)- f'(x)'
v (х) =f(x)f"(x).
[f '(х)]2
Другим примером метода, обладающего кубической скоростью схо
димости, является метод Галлея2
1 Этод метод часто называют итерационным методом Эйлера.
2 Эдмунд Галлей (1656-1742) - анrлнйскнй астроном, предсказавший периодиче
ское (с периодом 75 лет) появление кометы, впоследствии названной ero именем.
127](https://image.slidesharecdn.com/33379-160302054853/85/33379-128-320.jpg)
![§ 4.8. Дополнительные замечания
щихся методов типа бисекции с недостаточно надежными, но быстро
сходящимися методами типа секущих или Ньютона. Результирующие
алгоритмы обладают высокой надежностью и гарантированной сходимо
стью. В тех же случаях, когда в окрестности простого корня функция/
гладкая, сходимость становится сверхлинейной.
Алгоритм ZEROIN, изложенный в [106], является примером эффек
тивного гибридного алгоритма. на каждом шаге которого принимается
решение о том, какой из трех методов: бисекции, секущих или обрат
ной квадратичной интерполяции - следует использовать для вычисле
ния очередного приближения.
5. Л2-процесс Эйткена. Пусть {х<п>},~0 - последовательность
приближений к корню х ,полученная линейно сходящимся итерацион
ным методом (например, методом простой итерации). Использовав три
последние найденные приближения х<п - 1), х<п>, х<п + 1>, можно получить
более точное приближение к решению
_ (х<п + 1) _ х<п))2
х<п + 1) =х<п + J) _ -~----~-
t'(n + 1) _ 2х<п) + х<п - 1) ·
Этот способ ускорения сходимости используется на завершающем
этапе итераций и называется Л2-процессом Эйткена.
6. Критерии окончания. Проблема выбора правильного критерия
окончания итерационного процесса часто оказывается достаточно
сложной. Следует также иметь в виду, что наряду с обсуждавшимся в
предыдущих параграфах условием /х<п>-х<п- I) 1 < Е 1 нередко исполь-
зуется следующее условие: /J(х<п>)/ < Е2.
129](https://image.slidesharecdn.com/33379-160302054853/85/33379-130-320.jpg)

![§ 5.2. Нормы вектора и матрицы
где Л}АТА) - собственные числа 1 матрицы АТА;
т
IJAlloo = max L la;;I. (5.13)
1 $ {$ т ]= 1 .
Нормы llAll 1 и llAll 00 вычисляются просто (см. ниже пример 5.2).
Для получения значения первой из них нужно найти сумму модулей эле
ментов каждого из столбцов матрицы А, а затем выбрать максимальную
из этих сумм. Для получения значения llAll00 нужно аналогичным
образом поступить со строками матрицы А.
Как правило, вычислить значение нормы llAll2 бывает трудно, так
как для этого следует искать собственные числа Л1. Для оценки вели
чины llAll2 можно, например, использовать неравенство
(5.14)
Здесь llAllE= J,,~I laul 2- величина, называемая евклидовой нормой
матрицы А. Часто эту же величину называют нормой Фробениуса 2 и
обозначают llA 11F.
Норма (5.9) имеет простую геометрическую интерпретацию. Для того
чтобы ее привести, заметим, что операцию умножения матрицы А на век
тор х можно рассматривать как преобразование, которое переводит вектор
х в новый вектор у = Ах. Если значение llxll интерпретируется как длина
векторах, то величина llAxll / llxll есть коэффициент растяжения векторах
под действием матрицы А. Таким образом, величина
llAxiJ
kmax = llA11 = ~:~ bl (5.15)
представляет собой максимальный коэффициент растяжения векторов
под действием матрицы А. Полезно отметить, что для невырожденной
матрицы А минимальный коэффициент растяжения kmin отвечает норме
обратной матрицы и вычисляется по формуле
k - 11л-111-1 - . llAxll
mln - - ~~~ Тхf · (5.16)
Заметим, что в случае llA 11 < 1 происходит сжатие векторов под дей
ствием матрицы А.
1 Напомним, что число Л. называется собственным числом матрицы А, если существует
вектор х ~ О такой, что Ах= J..x. Каждая матрица порядка т имеет ровно т собственных
чисел (вообще говоря, комплексных) с учетом их кратности.
~ Фробениус Фердинанд Георг (1849-1917) - не'lецкий математик.
135](https://image.slidesharecdn.com/33379-160302054853/85/33379-136-320.jpg)
![Глава 5. Прямые методы решения систем линейных алгебраических уравнений
Пр и мер 5.2. Для матрицы
r
O.I -0.4 О ]
А= 0.2 О -0.3
о 0.1 0.3
найдем llA11 1 , llA 11 оо и оценим llA112 •
В соответствии с формулами (5.11), (5.13) и неравенством (5.14) имеем
llAll 1 = max{O.I + 0.2 +О; 0.4 +О+ 0.1; О+ 0.3 + 0.3} = 0.6;
llAll00 = max{O.I + 0.4 +О; 0.2 +О+ 0.3; О+ 0.1+0.3} = 0.5;
§ 5.3. Типы используемых матриц
Эффективность вычислений в линейной алгебре существенно зави
сит от умения использовать специальную структуру и свойства исполь
зуемых в расчетах матриц. Напомним некоторые важные типы матриц.
Квадратная матрица А называется диагональной, если ее элементы
удовлетворяют условию а11 = О для i "# j (все отличные от нуля элементы
расположены на главной диагонали):
а11 о о о
о а22 о о
А= о о а33 ." о
.................
О О О ... атт
Диагональную матрицу, у которой все элементы а11 главной диаго
нали равны единице, называют единичной и обозначают буквой Е:
1 о о ". о
о 1 о ... о
Е= о о 1 ." о
. . . . . . . . . . . .
о о о ". 1
136](https://image.slidesharecdn.com/33379-160302054853/85/33379-137-320.jpg)
![§ 5.3.Типы используемых матриц
Пр им ер 5.3. Вычислим норму единичной матрицы Е.
llExll llxll
По определению, llEll = ~~~ ТхiГ =~~~ llxll = l . Следовательно,
llEll = 1. .А
Важную роль в численном анализе играют треугольные матрицы.
Квадратная матрица А называется нижней треугольной, если все ее
элементы, расположенные выше главной диагонали, равны нулю
(о11 = О для i < }). Если же равны нулю все элементы матрицы, распо-
ложенные ниже главной диагонали (o1j = О для i > }), то она называ
ется верхней треугольной.
Нижняя и верхняя треугольная матрицы имеют соответственно сле
дующий вид:
0 11 о о о 0 11 0 12 °13 0 1т
0 21 0 22 о о о 0 22 О23 02т
й31 О32 й33 о о о О33 03т
.. .. .. .......... . .................
0тt 0т2 °т3 •.. 0тт о о о ... 0тт
Треугольные матрицы обладают рядом замечательных свойств. Напри
мер, для таких матриц определитель легко вычисляется по формуле
(5.17)
Квадратная матрица А называется симметричной, если она совпа
дает со своей транспонированной матрицей Ат (или, что то же, oij = 011
для всех i,j).
Будем называть симметричную матрицу А положительно опреде
ленной и писать А > О, если для всех векторов х ;tO квадратичная форма
т
(Ах, Х) = L Ol]XIXJ
i,]=I
принимает положительные значения.
Обозначим через Л.mtn и Л.mах минимальное и максимальное собст
венные значения матрицы А. Известно, что для симметричной матрицы
Л.miпllxll; ~ (Ах,х) ~ Л.maxllxll;
и матрица А положительно определена тогда и только тогда, когда все
ее собственные значения положительны.
137](https://image.slidesharecdn.com/33379-160302054853/85/33379-138-320.jpg)
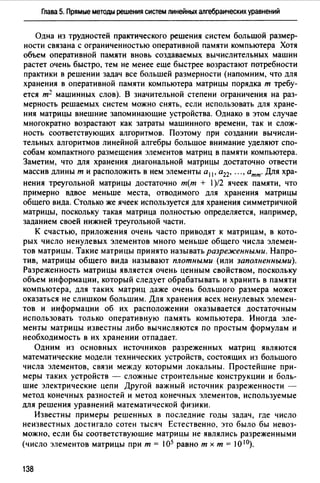
![Глава 5. Прямые методы решения систем линейных алгебраических уравнений
Доказательство. Заметим, что (а.А)-1 = а-1А- 1 . Поэтому
сопd(а.А) = llaAll · ll(aA)-111 = 1ai · l!All I aJ-1l!A-111 = сопd(А). 8
Замечание. Пользуясь приведенной в § 5.2 геометрической
интерпретацией норм матриц А и А- 1 (см. формулы (5.15) и (5.16)),
число обусловленности можно интерпретировать как отношение
максимального коэффициента растяжения векторов под действием
матрицы А к минимальному коэффициенту. сопd(А) = kmax/kmin·
Величина сопd(А) зависит, вообще говоря, от выбора нормы векто
ров в пространстве Rm. Фактически это есть зависимость максимального
коэффициента роста погрешности от способа измерения величины вход
ных данных и решения. В частности, выбору нормы llxllp (1 $ р $ оо)
отвечает сопdР(А) = l!A-1llP · llAllP.
Пр им ер 5.4. Вычислим сопd 00 (А) для матрицы
A=[l.03 0.991]·
0.991 0.943
Сначала найдем обратную матрицу
А-1 "'[-87.4 91.8 ] .
91.8 -95.4
(5.25)
Тогда сопd 00 (А) = llAll 00 • llA-111 00 "'2.о21·187.2 "'378. Если вход
ные данные для системы уравнений с матрицей (5.25) содержат относи
тельную погрешность порядка 0.1-1 %, то систему можно расценить
как плохо обусловленную. •
Пр им ер 5.5. Рассмотрим систему уравнений
1.03х 1 +0.99lx2 = 2.51,
(5.26)
О.991х 1 + О.943х2 = 2 41
с матрицей (5.25). Ее решением является х 1 "' 1 981, х2 "' 0.4735. Правая
часть системы известна в лучшем случае с точностью до 0.005, если
считать, что числа 2.51 и 2.41 получены округлением «истинных)) зна
чений при вводе в память трехзначного десятичного компьютера. Как
влияет погрешность во входных данных такого уровня на погрешность
решения? Возмутим каждую из компонент вектора правой части Ь =
= (2 51, 2.4J)T на 0.005, взяв ь• = (2.505, 2.415)r. Решением системы,
142](https://image.slidesharecdn.com/33379-160302054853/85/33379-143-320.jpg)


![§ 5.5. Метод Гаусса
и вычтем последовательно из третьего, четвертого, "., т-го уравнений
системы (5.30) второе уравнение, умноженное соответственно на
µ 32 , µ 42 , "., µm2 В результате получим систему
а11Х1 + а12Х2 + а13Х3 + ". + almxm = Ь1,
+а0 1х = ь< 1 >2т т 2 •
(2) <2> = ь<2>
а33 Х3 + ··· + а3тХт 3 • (5.32)
Здесь a~j> и ь~2 > (i,j = 3, 4, "., т) вычисляются по формулам
<2> (1) <I> ь~2) = ь~1> - . ь<1>
aij =а;/ - µ;2а2] , , µ,2 2 ·
Аналогично проводятся остальные шаги. Опишем очередной k-й шаг.
k-й шаг. В предположении, что главный (ведущий) элемент k-го
шага ai~- I) отличен от нуля, вычислим множители k-го шага
{k-1) {k-1)
µik=a;k lakk (i=k+,".,т)
и вычтем последовательно из (k + 1)-го, ..., т-го уравнений полученной
на предыдущем шаге системы k-e уравнение, умноженное соответст
венно на µk + 1, k• µk + 2, k• "., µmk·
Гlосле (т - 1)-ro шага исключения получим систему уравнений
а11Х1+а12Х2+ а13Х3+".+а1тХт = h1,
(2)
а33 Х3 + (5.33)
(т-1) - ь<т-1)
0тт Хт - т '
матрица А (т - 1) которой является верхней треугольной. На этом вычис
ления прямого хода заканчиваются.
Об ратный ход. Из последнего уравнения системы (5.33) находим
х т. Подставляя найденное значение х т в предпоследнее уравнение,
получаем х т _ 1• Осуществляя обратную подстановку, далее nоследова-
147](https://image.slidesharecdn.com/33379-160302054853/85/33379-148-320.jpg)










![§ 5.9. Метод прогонки
По формулам (5.68) последовательно находим:
/11 = Ji;'i = J6.25 = 2.5, /21 = а21 //11 = -1/2.5 = -0.4;
/31 = а31 //11 = 0.512.5 = 0.2, /22 = Ja22 -1;1= J5-0.16 = 2.2;
132 = (а32 - /31121 )//22 = (2.12 - 0.2(-0.4))/2.2 = !;
133=Ja33 -/;1 -/;2 =JЗ.6-0.22 -1 2 =1.6.
Следовательно, матрица L такова:
L = -0.4 2.2 О ·l2.5 о о ]
0.2 1 1.6
Система Ly = Ь имеет вид
2.5у, = 7.5,
-О.4у1 + 2.2у2 = -8.68,
О.2у1 + у2 + 1.6у3 = -0.24.
Решая ее, получаем у1 = 3, у2 = -3.4, у3 = 1.6.
Далее из системы Lтх =у, которая имеет вид
2.5х 1 - О.4х2 + О.2х3 = 3,
2.2Х2 + Х3 = -3.4,
1.6Х3 = 1.6,
находим решение х 1 = 0.8, х2 = -2, х3 = 1. А
§ 5.9. Метод прогонки
Рассмотрим метод прогонки 1 - простой и эффективный алгоритм
решения систем линейных алгебраических уравнений с трехдиагональ
ными матрицами
Ь1Х1 + С1Х2
a-r1 + br2 + c-r3
й;Х; - 1 + Ь;Х; + С;Х; + 1 =d,,
ат - 1Хт - 2 + Ьт - 1Хт - 1 + Ст - Хт = dm - !•
йmХт - 1 + ЬтХт = dm.
(5.69)
1 Метод прогонки был предложен в начале 50-х годов независимо несколькими авто
рами, в том числе российскими учеными И.М. Гельфандом, О.В. Локуцневскнм, В.С. Вла
димировым, АС. Кронродом.
171](https://image.slidesharecdn.com/33379-160302054853/85/33379-172-320.jpg)



![§ 5.9. Метод прогонки
Здесь
У1 о о ." о о 1 -а1 о ". о о
а2 У2 о ".о о о -а2 ". о о
L= о а3 Уз ." о о U=
о о о 1 -am-1
о о о ".ат Ут о о о о
Так как для определения L и U нет необходимости вычислять коэф
фициенты Р,, то общее число операций на получение разложения (5.78)
составляет примерно Зт.
Подобно тому как это описано в § 5.7, разложение (5.78) можно
использовать для решения систем с многими правыми частями. Если
нужно решить р систем с матрицей А, то общее число операций соста
вит примерно Зт + 5тр.
К сожалению, при обращении матрицы А теряется ее трехдиаго
нальная структура. Обратная матрица является заполненной, однако
для ее вычисления с помощью разложения (5.78) требуется примерно
лишь 2.5 т2 арифметических операций.
Так как det А = det L · det U, а det U = l, то определитель трехдиаго
нальной матрицы, после того как получено разложение (5.78), вычисля
ется по элементарной формуле
5. Некоторые варианты метода прогонки. Наряду с изложенным
выше «стандартным)) вариантом метода прогонки (правой прогонкой)
существует большое число других вариантов этого метода. Это методы
левой прогонки, встречных прогонок, немонотонной прогонки, потоко
вый вариант метода прогонки. В ряде случаев эти модификации могут
существенно улучшить обусловленность прогонки.
Для систем уравнений, обладающих близкой к (5.69) структуре, раз
работаны методы циклической прогонки, матричной прогонки и др.
С указанными вариантами метода прогонки можно подробно озна
комиться в [50, 89].
175](https://image.slidesharecdn.com/33379-160302054853/85/33379-176-320.jpg)
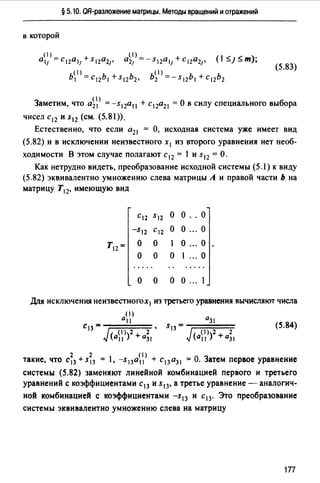






![Глава 5. Прямые методы решения систем линейных алгебраических уравнений
Построим матрицу Хаусхолдера
V=E-2wwT=
[
1 о
= о 1
о о
о] [О.945545]о - 2 0.250049 (о 945545 о 250049
1 0.208375
0.208375) ::::
о о] [ о.894055 о.236433 0.197028 ]
l о - 2 0.236433 0.0625245 0.0521040 ""
о 1 0.197028 0.0521040 0.0434201
[
-0.788110 -0.472866 -0.394056]
:::: -0.472866 0.874951 -0.104208 .
-0.394056 -0.104208 О.913160
Применим к левой и правой частям системы преобразование Хаус
холдера и получим эквивалентную систему
-2.53772х 1 + 10.0405х2 + 3.82233х3 = 6.21815,
- О.364646х2 + 3.66694х3 = 3.30229,
3.19606х2 - 9.44423х3 = -6.24817.
Возьмем теперь а2 = (--Q.364646, 3.l9606)r и построим двумерное
преобразование Хаусхолдера. Здесь уже v = а2 + lla211 2(l, О)Т =
= <-о.364646 + Jo.3646462 + 3.196062, 3.19606{ "" (2.85215, 3 19606)
w= v/llvl/2 ::= (0.665824, 0.746109)7: Двумерная матрица Хаусхолдера
имеет вид
v = r1 ol _J0.6658240665824,0.746109):::: [ 0.113357 -0.993555l.
2 lo 1J lo.746109J -О.993555 -O.ll3357j
Умножив обе части системы на матрицу
о о J0.113357 -0.993555 '
-0.993555 -0.113357
184](https://image.slidesharecdn.com/33379-160302054853/85/33379-185-320.jpg)



![Глава 5. Прямые методы решения систем линейных алгебраических уравнений
До к аз ат ель ст в о. Воспользуемся алгоритмом Грама-Шмидта
(5.97Н5.99) и получим матрицу Q с ортонормированными столбцами
q1, q2, ... , Чти верхнюю треугольную матрицу R с элементами rik• 1$ i $
$ k $ т (при k < i полагаем r;k = О).
Запишем формулу (5.98) в виде
k-1 k
ak = 'iik + L r;kЧ1 = LrikЧ, ·
i=I i=
Последнее равенство и означает, что алгоритм Грама-Шмидта дает
QR-разложение матрицы А.
Докажем теперь единственность матриц Q и R. Используя разложе
ние (5.95) и равенство (5.96), имеем
АТА = [QR]TQR = RTQTQR = RTR.
Заметим, что матрица L = Rт - нижняя треугольная. Поэтому для мат
рицы АТА мы получили разложение Холецкого (см. § 5.8):
(5.101)
Как следует из результатов § 5.8, матрица L в этом разложении опреде
ляется едиственным образом. Поэтому матрицы R = Lт и Q = A.R-1
также определяются однозначно. •
З. Модифицированный алгоритм Грама-Шмидта. К сожалению,
классический алгоритм Грама-Шмидта обладает чрезмерно высокой
чувствительностью к вычислительной погрешности. Поэтому для чис
ленной ортогонализации столбцов матрицы А используется модифици
рованный алгоритм Грама-Шмидта, устойчивый к вычислительной
погрешности.
При отсутствии вычислительной погрешности этот алгоритм дает те
же матрицы Q и R, что и алгоритм (5.97)---(5.99).
На k-м шаге этого алгоритма получают очередной столбец qk мат-
рицы Q, модифицированные столбцы aik1 1
коэффициенты rkj для}= k, k + ," , т.
На первом шаге полагают
r11=lla1ll2· ч1=a1lr11•
a~I) = Q· • 2J J' 1= ,".,т.
194
(k)
ат матрицы А и](https://image.slidesharecdn.com/33379-160302054853/85/33379-195-320.jpg)
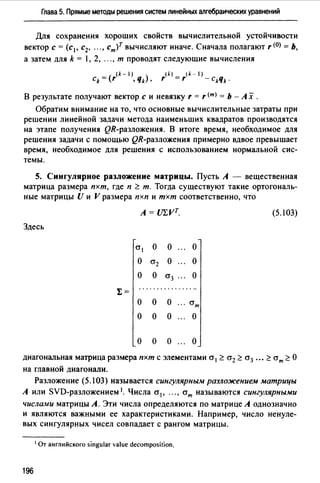
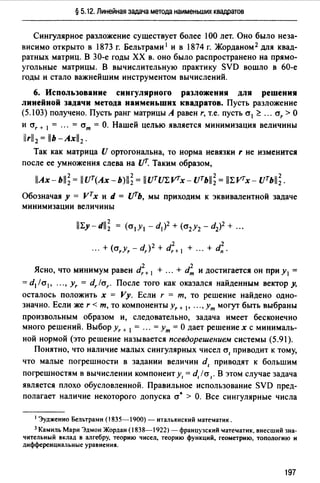
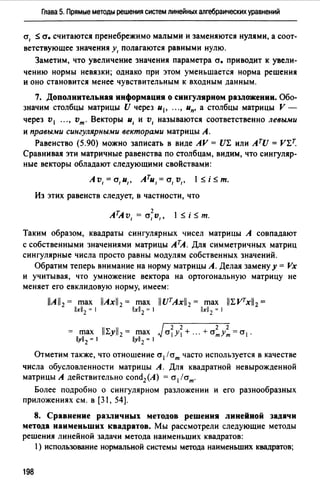
![§ 5.13. Дополнительные замечания
2) использование QR-раэложения~
3) использование сингулярного разложения матрицы А.
Какой метод следует предпочесть при решении линейной задачи
метода наименьших квадратов? Наиболее быстрым является метод нор
мальных уравнений. Затем идет метод, основанный на использовании
QR-разложения. Наконец, наибольших вычислительных затрат требует
использование сингулярного разложения.
Если матрица А хорошо обусловлена, то следует предпочесть метод
нормальных уравнений. Однако, если матрица А плохо обусловлена,
нормальная система имеет число обусловленности, примерно равное
квадрату числа обусловленности матрицы А. Поэтому можно ожидать,
что при использовании этого метода будет потеряно вдвое больше зна
чащих цифр по сравнению с методами, основанными на QR-раэложении
или сингулярном разложении матрицы.
В случае, когда матрица А плохо обусловлена, но система её столб
цов линейно независима и не близка к линейно зависимой, наиболее
подходящим методом является, по-видимому, использование QR-разло
жения.
Наиболее медленным, но наиболее надежным методом является
использование сингулярного разложения. Особенно важно использова
ние сингулярного разложения в случае, когда система столбцов мат
рицы А линейно зависима или близка к линейно зависимой.
Таким образом, выбор метода решения зависит от того, что важнее
для пользователя: скорость решения задачи или надежность получен
ных результатов.
§ 5. 13. Допоnнитеnьные замечания
1. Более подробное и в то же время доступное изложение рассмот
ренных в этой главе вопросов можно найти, например, в [46, 47, 81,
107, 5*, 16*, 20•]. Особое внимание следует обратить на книгу [31],
представляющую собой удачное сочетание учебного пособия и спра
вочника по методам матричных вычислений.
2. Для решения систем линейных алгебраических уравнений
создано высококачественное и бесплатно распространяемое програм
мное обеспечение. Пакеты BLAS, LINPACK, EISPACK и LAPACK,
ориентированные на системы уравнений с заполненными матрицами,
доступны по адресу http://www.пet1b.org. Пакет SPARSКIT, предназ
наченный для решения систем уравнений с разреженными матри
цами, доступен по адресу http://www.cs.umn.edu/Research/arpa/SPARSKIТ/.
199](https://image.slidesharecdn.com/33379-160302054853/85/33379-200-320.jpg)
![Глава 5. Прямые методы решения систем линейных алгебраических уравнений
Обратим также внимание на пакет LinPar, доступный по адресу
http://www.ict.nsc.ru/linpar/.
3. Интересной модификацией метода Гаусса является алгоритм
Краута, основанный на изменении порядка выполнения арифметиче
ских операций. Существуют два случая, когда эта модификация может
иметь преимущества. Во-первых, алгоритм Краута выгоден тогда, когда
для вычислений используется калькулятор, так как алгоритм позволяет
избегать выписывания промежуточных результатов. Во-вторых, он при
вqр:ит к наименьшей вычислительной погрешности при условии, что
вычисления ведутся на компьютере, обладающем сравнительно быст
рой арифметикой с расширенной точностью или особенно быстрой
т
операцией вычисления скалярных произведений (х, у) = Lх, у,. Обсу-
1=1
ждение модификации Краута можно найти, например, в [81, 107].
4. Иногда вместо метода Гаусса используют метод Гаусса-Жордана,
отличающийся от метода Гаусса тем, что на k-м шаге прямого метода
обнуляются не только элементы k-го столбца матрицы, находящиеся под
главной диагональю, но и элементы k-го столбца, находящиеся над
главной диагональю. В результате матрица системы приводится не к
нижнему треугольному виду, а к диагональному виду.
Отметим, что прямой ход метода Гаусса-Жордана требует при
мерно т3/2 арифметических операций и по затратам машинного вре
мени проигрывает методу Гаусса примерно в полтора раза.
5. Следует отметить, что в данной главе оказались практически не
отраженными прямые методы решения систем уравнений с разрежен
ными матрицами (исключение составляет § 5.9, посвященный методу
прогонки). Желающим найти доступное изложение современных пря
мых методов, предназначенных для решения очень больших линейных
систем с разреженными матрицами, можно посоветовать обратиться
к [48]. Укажем также на книги [38, 77, 116], специально посвященные
технологии разреженных матриц.
6. Предположим, что после того, как было найдено решение х сис-
темы Ах = Ь, возникла необходимость решить систему Ах = Ь с матри
цей А , отличающейся от матрицы А несколькими элементами. Напри
мер, могло выясниться, что заданные ранее элементы содержали
грубые ошибки. Возможно также, что решаемая задача такова, что в
ней элементы матрицы последовательно меняются, а правая часть оста
ется неизменной.
200](https://image.slidesharecdn.com/33379-160302054853/85/33379-201-320.jpg)
![§ 5.13. Дополнительные замечания
Разумеется, х можно найти, решив систему снова и проигнорировав
полученную на предыдущем этапе информацию. Однако в рассматри
ваемом случае можно найти поправку Лх = х -х к найденному ранее
решению, использовав всего О(т2) операции.
Пусть А = А - иvТ, где и и v - векторы размерности т. Справед
лива фор.мула Шерманна-Моррисона
А- 1 = А-1 + a(A-lu)(vтA- 1 ),
где а= 1/(1 - vTA-1u). Применяя ее, приходим к следующему алгоритму:
1°. Систему Ау = и решают относительно у.
2°. Систему ATz = v решают относительно z.
3°. Вычисляют а= 1/(1 - vту), р = zTb и Лх =ару.
4°. Полагают х = х + Лх.
Суммарное число операций будет действительно составлять О{т2),
если для решения систем Ау = и и АТz = v применить обратную под
становку с использованием LU-разложения матрицы А, найденного
ранее на этапе решения системы Ах = Ь.
В случае, когда матрица А отличается от матрицы А только одним
элементом а,1 = а,1 + Ла,1 , можно положить и= Ла1Jе1 , v = е1, а указан
ный алгоритм упростить следующим образом:
1°. Систему Ау = ЛalJ е, решают относительно у.
2°. Систему Атz = е1 решают относительно z.
3°. Вычисляют а= 1/(1 - у), Р = zть и Лх =ару.
4°. Полагают х = х + Лх.
Основываясь на формуле Шерманна-Моррисона, можно указать
и способ пересчета LU-разложения матрицы.
О формуле Шерманна-Моррисона и ее применениях см. [54, 31].
201](https://image.slidesharecdn.com/33379-160302054853/85/33379-202-320.jpg)
![§ 6.1. Метод простой итерации
Таким образом, в качестве критерия окончания итерационного про
цесса может быть использовано неравенство
lx(n)_x(n-1)11 <Е 1 , (6.14)
1-llвll
где Е 1 = /iВiГ Е.
В практике вычислений иногда используют привлекательный своей
простотой критерий окончания
llx(n)_x(n-l)I <Е. (6.15)
Отметим, что для метода простой итерации его применение обос
новано только тогда, когда llBll ~ 1/2 (в этом случае (l - llBll )/ llBll ~ l
и выполнение неравенства (6.15) влечет за собой выполнение нера
венства (6.14)). Однако в большинстве реальных случаев величина llBll
оказывается близкой к единице и поэтому (l - 11В11 )/ 11В11 « l . В этих
случаях Е 1 « Е и использование критерия (6.15) приводит к существенно
преждевременному окончанию итераций. Величина llx(n) -х<п- 1>11 здесь
оказывается малой не потому, что приближения х<п - I) и х<п> близки к
решению, а потому, что метод сходится медленно (ер. с замечанием
на с. 104).
Пр им ер 6.1. Использовав метод простой итерации в форме Якоби,
найдем решение системы
х2 + О.5х3 = 7.5.
5х2 + 2. l2x3 = -8.68,
О.5х 1 + 2. l2x2 + 3.6х3 = -0.24,
с точностью Е = lо-3 в норме 11 •11 00 •
(6.16)
Вычислив коэффициенты по формулам (6.5), приведем систему к
виду (6.4)
х 1 = O.l6x2 - О.08х3 + 1.2,
х2 = О.2х 1 - О.424х3 - l.736, (6.17)
х3 = -О. 389х 1 - О.5889х2 - 0.0667.
В последнем уравнении коэффициенты даны с точностью до погреш
ности округления. Здесь
[
о
В= 0.2
-0.1389
0.16 -0.08]
о -0.424 ,
-0.5889 о
[
1.2 Jс= -1.736 .
-0.0667
(6.18)
207](https://image.slidesharecdn.com/33379-160302054853/85/33379-208-320.jpg)



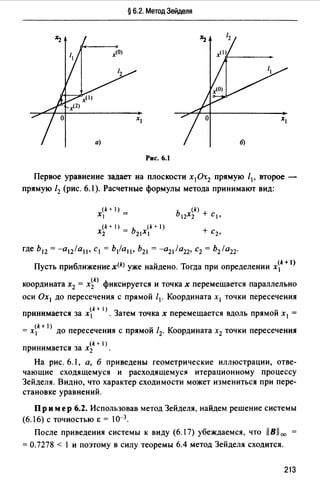


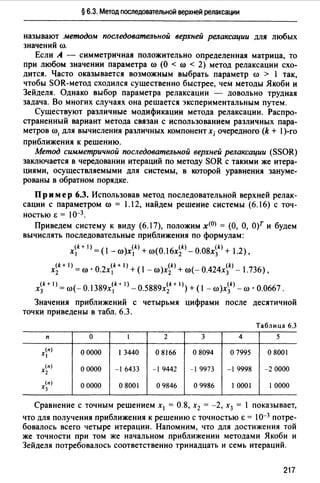


![§ 6.4. Другие двухслойные итерационные методы
-2рп
~ Е выполнено, если р" ~ Е/2. Отсюда п ~ п 0(Е)
1 + р2п
2
Поскольку р = 1- то
JcondiA) + 1'
п 0(Е) ~ ~ Jcond2(A) ln(2/E) при cond2(A) » 1.
In(2/e)
ln(I/p).
(6.48)
Сравнение значения (6.48) со значением п 0(Е), определяемым фор
мулой (6.42) показывает, что метод с чебышевским набором пара
метров требует примерно в Jcond2(A) меньшее число итераций, т.е. он
обладает существенным преимуществом в числе итераций перед
методом простой итерации с оптимальным выбором параметра.
Замечание 1. Следует обратить внимание на то, что число ите
раций п для итерационного метода с чебышевским набором парамет-
ров заранее фиксируется и за приближение к решению х принима
ется именно х<п>. Значения х<* полученные на промежуточных
шагах с О < k < п, плохо аппроксимируют решение. При необходимо
сти уточнить приближение цикл из п итераций повторяется, и за сле
дующее приближение к решению принимается х<2п).
Замечание 2. При п = 1 метод с чебышевским набором пара
метров превращается в явный стационарный итерационный метод
(6.37) с оптимальным параметром (6.38).
Замечание 3. Метод Ричардсона длительное время не исполь
зовался на практике из за серьезных проблем с вычислительной
устойчивостью. Как оказалось, для вычислительной устойчивости
рассматриваемого метода очень важен порядок, в котором берутся
нули многочлена Чебышева. Устойчивость метода имеет место
только при специальной нумерации нулей. В противном случае
наблюдается резкий рост вычислительной погрешности, который
может привести к полной потере точности.
В настоящее время известны наборы чисел 1 Jn = (j1, j2, "., jn),
обеспечивающие вычислительную устойчивость метода, и алгоритмы
их построения для любого п. Приведем такие наборы для п = 4, 8, 16.
14 = (1, 7, 3, 5), lg = (1, 15, 7, 9, 3, 13, 5,11),
Jlб = (1, 31, 15, 17, 7, 25, 9, 23, 3, 29, 13, 19, 5, 27, 11, 21).
1 Алгоритмы их построения были опубликованы практически одновре!енно в статье
В.А. Лебедев, С.А. Финогенов // Журн. вычисл. матем. и матем. физ. 1971. Т. 11. № 2.
С. 425-438 и в монографии А.А. Самарский. Теория разностных схем. М.: Наука, 1971.
Дополнительную информацию можно найти также в [62, 89].
223](https://image.slidesharecdn.com/33379-160302054853/85/33379-224-320.jpg)

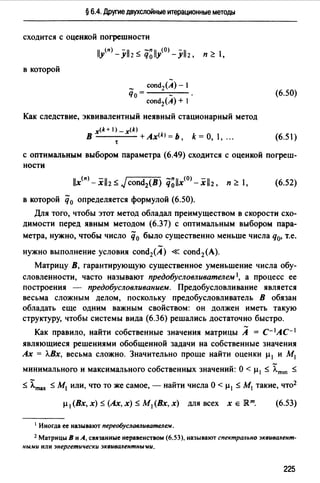



![§ 6.4. Друrие двухслойные итерационные методы
- 1 - - 1 -- -
F(x)-F(x) = '2 (А(х + ЛХ), х + ЛХ)-(Ь,х)- 2 (Ах, х) + (Ь, х) =
- 1 - - 1 - -
=(Ах -Ь, Лх) + '2 (АЛх, ЛХ)=l (АЛх, ЛХ) >О.
Таким образом, всякий итерационный метод минимизации квадра
тичной функции (6.63) одновременно .являете.я итерационным методом
решени.я системы (6.31). Например, метод покоординатного спуска,
примененный к функции (6.63), дает ту же последовательность прибли
жений, что и метод Зейдел.я. Подробнее об этом будет сказано в § 10.2;
см. также [9].
В методе наискорейшего спуска итерации осуществляются по тем
же формулам
x<k + 1>=x<k> + 'tk + 1r(k), r<k+ I) = r<k> - 'tk+ 1 А r<k>, k?:. О, (6.64)
что и в методе минимальных нев.язок. Но параметр 'tk + 1 вычисляете.я
иначе:
llr<k>ll~
'tk + 1 = (Ar<k), r<k>).
(6.65)
Именно при этом значении достигает минимума функция <pk(a) =
= F(x<k> + ar<k>) (см. § 10.3).
Теорема 6.11. Метод наискорейшего спуска (6.64), (6.65) сходится
с оценкой погрешности
llx(n) -.XllA s q~llx(OJ -.XllA, п?:. 1,
где q0 определяется формулой (6.39). Как следствие,
llx(n) _.Xll2 s Jcond2(A) q~llx(O) -.Xll2, п?:. 1. •
(6.66)
Замечание 1. Как и метод минимальных невязок, метод наис
корейшего спуска сходится с той же скоростью, что и явный ите
рационный метод с оптимальным выбором параметра. Однако он
обладает тем существенным преимуществом перед явным итера
ционным методом с оптимальным выбором параметра, что не тре
бует для своей реализации знания собственных значений Лmш
и лmах или их оценок.
Заме чан и е 2. Дополнительную информацию о методе наиско
рейшего спуска можно найти в § 10.3.
229](https://image.slidesharecdn.com/33379-160302054853/85/33379-230-320.jpg)
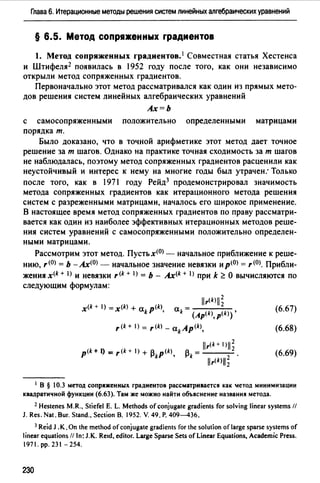
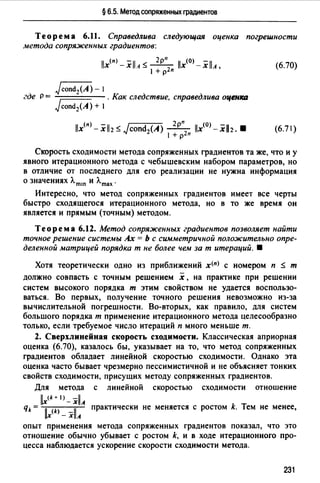
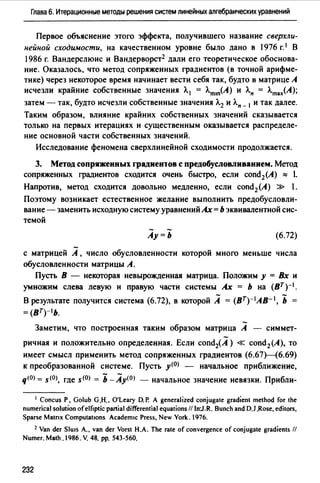

![Глава 6. Итерационные методы решения систем линейных алгебраических уравнений
При таком выборе А = Е, cond2(A) = 1 и метод сопряженных гради
ентов даст точный результат за один шаг. Однако, если мы уже имеем
матрицу L и можем быстро решать системы вида LTy = Ь, Lx =у, то в при
менении итерационного метода нет необходимости.
С другой стороны, необходимо, чтобы структура матрицы В была
достаточно простой, чтобы быстро решать системы (6.76).
Ясно также, что вычисление предобусловливателя В не должно тре
бовать большой вычислительной работы.
Одна из наиболее важных стратегий предобусловливания состоит в
использовании неполного разложения Холецкого, в котором вт= i -
аппроксимация матрицы L, входящей в разложение Холецкоrо.
Простой метод вычисления L указан в [31).
Замечание. Свойство сверхлинейной сходимости (см. п. 2)
подсказывает и другую стратегию предобусловливания. Предобус
ловливатель нужно выбирать не так, чтобы число обусловленности
матрицы А было много меньше числа обусловленности матрицы
А, а так, чтобы большая часть собственных значений матрицы А
сконцентрировалась (кластеризовалась) вблизи единицы, то есть в
интервале (1 - Е1' 1 + е2). Если вне этого интервала окажется лишь
небольшой набор собственных значений, то после нескольких ите
раций метод сопряженных градиентов начнет вести себя так, как
1+е 1
будто число обусловленности матрицы А не превышает
) - Е2.
При этом возможно, что даже cond2(A) > cond2(A).
§ 6.6. Допоnнитеnьные замечани•
1. В этой главе были рассмотрены лишь основные итерационные
методы решения систем линейных алгебраических уравнений. -Вне
нашего поля зрения остались многие известные и популярные методы.
Среди них методы расщепления (неявные методы переменных направ
лений), блочные итерационные методы, методы подпространств
Крылова, метод сопряженных невязок, обобщенный метод мини
мальных невязок (GMRES), методы MINRES, QMR, Bi-CGSTAB.
Эrи методы изложены, например, в учебниках [9, 88, 100, 122, 2°, 5°,
16*] и в специальной литературе [24, 89, 110, 121, 123, 24°, 26°].
234](https://image.slidesharecdn.com/33379-160302054853/85/33379-235-320.jpg)
![§ 6.6. Дополнительные замечания
2. В гл. 1О мы еще раз вернемся к методам наискорейшего спуска и
сопряженных градиентов в связи с задачей минимизации квадратичной
функции (6.63). Обсуждение некоторых интересных особенностей
метода сопряженных градиентов можно найти в [100, 5*], см. также [31].
3. В настоящее время наиболее глубоко развиты методы решения
систем уравнений с симметричными положительно определенными
матрицами. Однако часто встречаются задачи, в которых матрица А -
несимметричная или симметричная, но не является положительно
определенной. Ряд эффективных методов решения систем уравнений
с несимметричными матрицами рассмотрен в [89, 110, 122, 123, 2*, 26*].
В принципе, всегда существует возможность симметризовать любую
систему Ах = Ь с невырожденной матрицей, т.е. свести ее к эквива
лентной системе с симметричной положительно определенной мат
рицей. Для этого достаточно умножить обе части системы на матрицу
Ат. В полученной таким образом системе
АТА.х =Ать (6.78)
матрица А = АТА обладает всеми нужными свойствами. Однако, как
правило, это делать не рекомендуется. Дело в том, что при переходе от А
к А может быть потеряно свойство разреженности. Как следствие, воз
растут вычислительные затраты на одной итерации. Кроме того, как
правило, существенно ухудшается обусловленность системы. Например,
для матриц, близким к симметричным, cond(A)"" (cond(A))2 . В силу
этого даже самые быстрые методы решения систем с симметричными
матрицами в применении к системе (6.78) могут стать очень неэффек
тивными.
4. Как уже было отмечено, одно из важнейших достоинств итераци
онных методов заключается в возможности эффективного использо
вания разреженности матрицы системы. Поясним сказанное на примере
метода простой итерации (6.6).
В случае, когда матрица В - заполненная, для вычисления по
формуле (6.6) требуется выполнить примерно 2т2 арифметических
операций. Однако для разреженной матрицы с М (М « т2) нену
левыми элементами требуется лишь примерно 2М арифметических
операций (одно умножение и одно сложение на каждый ненулевой
элемент). Таким образом, общее число операций составляет примерно
2Мп(Е), где n(E) - число итераций, необходимое для достижения
заданной точности Е.
5. В случае, когда препятствием для быстрой сходимости итераци
онного метода является плохая обусловленность матрицы А, для уско
рения сходимости систему Ах = Ь заменяют эквивалентной системой
- - - -1 -1
Ау= Ь с матрицей вида А= В1 АВ, , которая имеет существенно
меньшее число обусловленности. Этот подход, называемый предобу
словливание.м, уже обсуждался в § 6.4.
235](https://image.slidesharecdn.com/33379-160302054853/85/33379-236-320.jpg)
![§ 6.6. Дополнительные замечания
ционного метода. Согласно о2-процессу ускорения сходимости уточ
ненное приближение х(п) имеет ВИД
_( ) ( ) х(п) _ х<п - 1)
xn =хп +----
1 -уп
(х<п- ) _х(п-2),х(п)_х(п-1))
Уп= llx<п>-x<n-IJ!j; .
Приближение х(п) может быть использовано далее как начальное ДЛЯ
следующих итераций. Как критерий применимости о2-процесса может
быть использовано приближенное равенство
1(х<п-1) -х<п -2), х<п) _х<п - 11) 1
"" l.llx<n - 1) - х<п -2>1i 2lix<n) - х<п - 1>ii2
Подробнее о о2-процессе см. в [9].
Приближения х<п - 2>, х<п - I) и х<п> могут быть использованы и иначе.
Будем искать уточненное приближение к решению в виде
,Х<п> =х<п-2) + а(х<п-l)_х(п-2)) + р(х<п>-х<n-2>), (6.75)
где параметры а и р определяются из условия минимума евклидовой
нормы невязки ;:<п> =Ь-Ах<11>. Заметим, что
;<п> =,.<11-2) +алr<п-1) + рл,.<п)'
где r<п> =Ь -Ах<п>, лr<п-1) =r<п-1) _ r<п-2>, лr<п> =r<п> _r<п-2).
Необходимое условие экстремума для функции
ср(а, р) = lir<11 - 2>+ алr<п-I) + рлr<11>11~.
приводит к системе уравнений
(Лr<п-1>, лr<n- l))a + (Лr<п-1>, лr<п>)р =-(r<п-2>, дr<п-1>),
(Лr<11 - 1>, лr<11>)а + (Лr<11>, Лr<11>)р =-(r<п-2>, Лr<11>)
относительно параметров а и р. Найденное приближение (6.75) таково,
что
11r<11>il2 s min{11 r<11 - 2ъ, 11r<11 - 1>112, 11r<11>ll2} .
Дальнейшее развитие этой идеи приводит к обобщенному методу
минимальных невязок (MINRES).
237](https://image.slidesharecdn.com/33379-160302054853/85/33379-238-320.jpg)




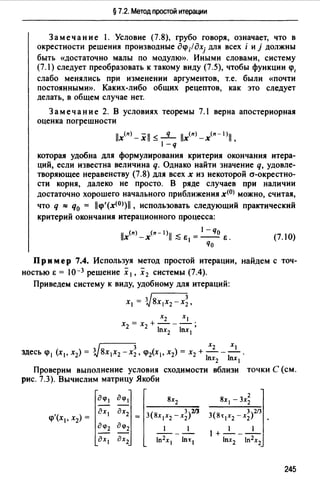
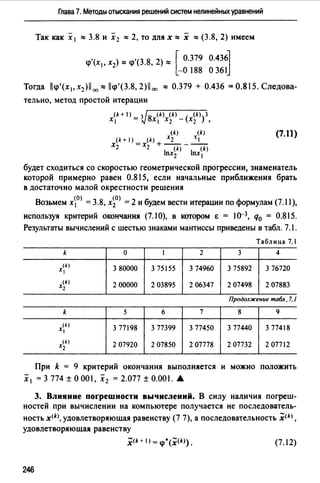


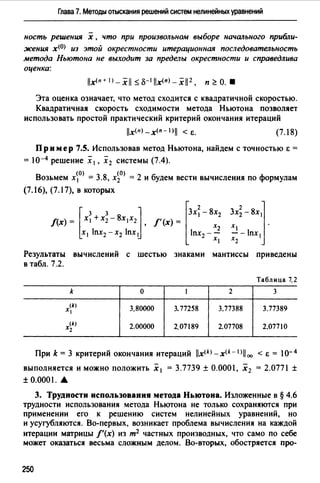
![§ 7.4. Модификации метода Ньютона
блема нахождения хорошего начального приближения. Ее решить
в многомерном случае гораздо труднее, чем в одномерном.
4. Модифицированный метод Ньютона. Модифицированный
метод Ньютона призван существенно ослабить требования к
начальному приближению. Опишем одну его итерацию.
Сначала, как и в классическом варианте метода, решают систему
f'(х<п>)лх<п + 1) = -f(x(n))
относительно вектора лх<п + 1).
Затем находят число ап, решая задачу одномерной минимизации
Fn(an) = min Fn(a); Fn(a) = llf(x(n) + аЛх(п+ 1>)11.
а
Следующее приближение вычисляют по формуле
х<п + 1) =х<п) + аплх<п + 1).
Подробнее с модифицированным методом Ньютона можно ознако
миться в [104].
5. Влияние погрешности вычислений. Пусть f' и (/')• - вычис
ляемые на компьютере приближенные значения вектор-функции / и
матрицы Якоби f'. Пусть для решения системы линейных алгебраических
уравнений (7.16) используется схема частичного выбора (см. § 5.5). Будем
считать, что матрицаf достаточно хорошо обусловлена (cond(/')E,.. « 1)
и вычисляется не слишком грубо ( 11/' -(/').11 « 11/'11 ). Тогда при
выборе начального приближения из малой окрестности решения метод
Ньютона является устойчивым и дает возможность найти решение с
гарантированной точностью Е <':: Е"• = ll(f'(x))-1llЛ(/").
§ 7.4. Модификации метода Ньютона
Если оценивать качество метода Ньютона только по числу необхо
димых итераций, то следовало бы сделать вывод о том, что этот метод
стоит применять всегда, когда он сходится. На практике для достижения
разумной точности Е при выборе достаточно хорошего начального при
ближения х<0> требуется, как правило, три-пять итераций.
Однако при оценке общей трудоемкости метода следует учитывать,
что на каждой итерации требуется выполнение следующей дополни
тельной работы:
1) вычисление т компонент вектора f(x<n>);
2) вычисление т2 компонент матрицы Якоби f' (x<n>);
3) решение системы линейных алгебраических уравнений (7.16}.
251](https://image.slidesharecdn.com/33379-160302054853/85/33379-252-320.jpg)
![Глава 7. Методы отыскания решений систем нелинейных уравнений
5. Метод Стеффенсена. Вычисления по методу Стеффенсена про
изводят по формулам (7.21Н7.23), где h(n) =f(x<n>). Замечательно то,
что хотя этот метод не требует вычисления производных и в отличие от
метода секущих является одношаговым, он, как и метод Ньютона,
обладает свойством квадратичной сходимости. Правда, как и в методе
Ньютона, его применение затруднено необходимостью выбора
хорошего начального приближения. По-видимому, для решения нели
нейных систем вида (7.1) метод Стеффенсена чаще окажется лучшим
выбором, чем метод секущих или метод ложного положения.
Как и в одномерном случае (см. § 4.7), следует отметить, что методы
секущих и Стеффенсена теряют устойчивость вблизи решения (факти
чески это происходит при попадании приближения х<п> в область неоп
ределенности решения х ). Поэтому при использовании этих методов
важно вовремя прекратить выполнение итераций.
6. Метод Бройдена. Существует класс квазинъютоновских методов,
обобщающий на случай систем уравнений метод секущих. Среди этих
методов заслуженной популярностью пользуется метод Бройдена.
В этом методе наряду с последовательностью приближений .x(k) к
решению вычисляется последовательность приближений JJ(,k) к матрице
Якоби/'( х ). Пусть заданы начальные приближения .х<0> :== х и ]Jf,O) :==
:==f'(x ). Следующие приближения при k = О, , ..., вычисляются по
формулам
в<k>Лх(k + 1>= -ik> ,
x(k + 1) = x<k> + лх<k + 1>,
лik+ 1>= лх<k+ 1>)- Лхщ),
в<1:+ 1) = в<k> + 1 (Л/<k +1>_ в<k>лх<k +1>)(Лх(k+1 ))т
llлx<k + 1>ii ~
Этот метод обладает сверхлинейной сходимостью.
§ 7.5. О некоторых подходах к решению зада11
nокаnизации и отыскания
решений систем неnинейных уравнений
Подчеркнем еще раз, что одной из наиболее трудных проблем, возни
кающих при решении систем нелинейных уравнений, является задача
локализации решения. Изложим некоторые подходы к ее решению,
широко применяемые в практике вычислений. Указанные методы можно
применять и для вычисления решения с заданной точностью Е.
254](https://image.slidesharecdn.com/33379-160302054853/85/33379-255-320.jpg)
![§ 7.5. О некоторых подходах к решению задач локализации систем нелинейных уравнений
1. Использование методов минимизации. Иногда бывает полезно
свести задачу отыскания решения системы нелинейных уравнений к
задаче отыскания минимума функции многих переменных. В про
стейшем варианте это сведение выглядит следующим образом. Введем
т
функцию Ф(х) = L(f,(x))2 Она неотрицательна и достигает своего
1=1
минимума (равного нулю) тогда и только тогда, когда/,(х) =О для всех
1 = 1, 2, ..., т, т.е. когда х является решением системы (7.1 ).
Применив для отыскания минимума функции Ф один из итераци
онных методов минимизации - методов спуска (см. гл. 10), можно
найти вполне удовлетворительное приближение к решению х ,которое
затем имеет смысл использовать как начальное приближение х<0> в
одном из итерационных методов решения нелинейных систем.
Выгода от указанного сведения исходной задачи к задаче миними
зации состоит в том, что, как правило, методы спуска имеют более
широкую область сходимости. Использование методов спуска можно
рассматривать и как один из способов локализации решений системы
(7.1 ). Применение на заключительном этапе методов, специально ори
ентированных на решение нелинейных систем, вызвано тем, что вблизи
искомого решения методы спуска сходятся медленнее.
Следует отметить, что функция Ф(х) может иметь и ненулевые
локальные минимумы, и в зависимости от выбора начального прибли
жения методы спуска могут приводить к точкам локального минимума,
не являющимися решениями системы (7.1).
Пример 7.4. Решения системы (7.4) являются точками глобального
минимума функции
Ф(х1, х2) = (х~ + х~ - 8х1х2)2 + (х1 lпх2 -х2 lпxi)2. •
2. Метод продолжения по параметру. Сначала заметим, что
довольно часто на практике встречаются ситуации, когда система нели
нейных уравнений естественным образом зависит от некоторого пара
метра t, т.е. имеет вид
f(x, t) =О, (7.24)
а решение ее следует найти при некотором фиксированном значении
параметра, например при t = 1. В частности, этим свойством обладает
система из примера 7.1. Предположим, что при каждом t е [О, 1]
система (7. 24) имеет решение х = х( t), непрерывно зависящее от
255](https://image.slidesharecdn.com/33379-160302054853/85/33379-256-320.jpg)
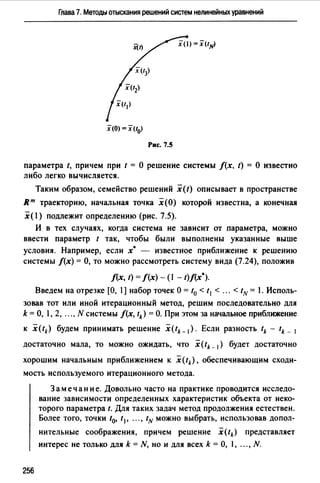
![§ 7.5. О некоторых подходах к решению задач локализации систем нелинейных уравнений
3. Метод дифференцирования по параметру. Предположим, что
решение x(t) системы (7.24) является гладкой функцией параметра t.
Дифференцируя тождество f(x(t), t) = О по t, получаем
t~<x<1>. 1)x'(t) +J;(x(t), t) = о.
Здесь f~(x, t) - матрица с элементами дfi/дх/х, t) (i,j = 1, 2, ..., m),
а t;(x, t) - вектор-столбец с элементами дf;!дt(х, t) (i = 1, 2, ..., m).
Таким образом, если матрица!~ невырождена (detf~ *О), ТО x(t)
является решением задачи Коши для системы обыкновенных диффе
ренциальных уравнений
x'(t) = -[f~(x(t), t)]-1/;(x(t), t), х(О) = х(О). (7.25)
Интересующее нас значение решения х (1) можно теперь найти прибли
женно, применяя численные методы решения задачи Коши (см. гл. 14).
Например, метод Эйлера приводит к процессу
x<k+ l) =x<k) - (tн 1 - tk) [f~(хщ, tk) ]-11;cx<k>, tk) , k = О, 1, ..., N- 1,
где х(О) = х(О), x(k) - приближение к x(tk) (рис. 7.6).
Конечно, метод Эйлера приведен здесь только для удобства иллюст
рации, а в реальной ситуации используется один из методов более
высокого порядка точности.
:х-<о) =xUo>
Рис. 7.6
257](https://image.slidesharecdn.com/33379-160302054853/85/33379-258-320.jpg)
![Глава 7. Методы отыскания решений систем нелинейных уравнений
Полученное указанным способом значение x!NJ можно использовать
и как хорошее начальное приближение к х( l) в одном из итераци
онных методов решения системы (7.24).
Заме чан и е l. Иногда метод дифференцирования по пара
метру называют методом Давиденко 1.
Замечание 2. Методы продолжения и дифференцирования по
параметру нередко позволяют успешно преодолевать непростую
проблему локализации. Однако следует отметить, что эти методы
далеко не всегда оказываются эффективными и их практическое
применение требует определенной осторожности.
§ 7.6. Допоnнитеnьные замечани1
1. Существенно более подробная и богатая информация о системах
нелинейных уравнений и методах их решения содержится в книгах [74,
40]. Рекомендуем также обратиться к учебнику [9].
2. В последнее время значительный интерес проявляется к так
называемым квазиньютоновским методам, которые получаются при
специальных аппроксимациях матрицы Якоби. Часто такая аппрокси
мация сочетается с использованием гибридных алгоритмов подобно
тому, как это делается для решения одного нелинейного уравнения (см.
§ 4.8). Полезные обсуждения таких методов можно найти в [40].
3. Иногда подходящим для решения задачи методом оказывается
метод установления см. [9]. Чаще это бывает тогда, когда решение
системы (7.1) описывает устойчивое стационарное состояние неко
торой физической системы.
4. Рекомендовать тот или иной метод как наиболее подходящий для
решения системы нелинейных уравнений невозможно без тщательного
анализа конкретной задачи.
1Дмитрий Федорович Давиденко (1923-1995) - российский математик.
258](https://image.slidesharecdn.com/33379-160302054853/85/33379-259-320.jpg)
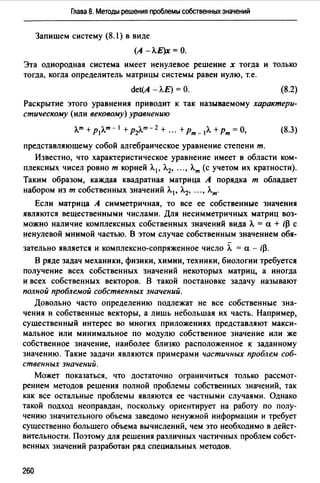
![§ 8.1. Постановка задачи. Некоторые вспомогательные сведения
Пример 8.1. Найдем собственные числа матрицы
[
2 -9 5 ]
А= 1.2 -5.3999 6 ·
1 -1 -7.5
(8.4)
Запишем характеристический многочлен
[
2 - л. -9
Р3(Л.) = det(A - Л.Е) = det 1.2 -5.3999 - л.
1 -1
= -Л.3 - 10.8999Л.2 - 26.49945')... - 21.002.
Используя один из итерационных методов решения нелинейных урав
нений (например, метод Ньютона), определяем один из корней уравнения
Р3(Л.) =О, а именно Л. 1 ~ -7.87279. Разделив Р3(Л.) на Л. - Л.1 , имеем
Рз{Л.)
~ Р2 (Л.) = Л.2 + 3.0271 lЛ. + 2.66765.
л. + 7 87279
Решая квадратное уравнение Р2(Л.) =О, находим корни Л. 2, 3~
~ -1.51356 ± 0.613841 i.
Таким образом, матрица А имеет одно вещественное собственное
значение Л. 1 ~ -7.87279 и два комплексно-сопряженных собственных
значения Л.2, 3 ~ -1.51356 ± 0.613841 i. .А
Численные методы решения проблемы собственных значений,
использовавшиеся до конца 40-х годов ХХ в. сводились в конечном
счете к решению характеристического уравнения (8.3). Этой класси
ческой схеме следовали и мы в примере 8.1. При реализации такого
подхода основные усилия были направлены на разработку эффек
тивных методов быстрого вычисления коэффициентов характеристи
ческого уравнения. Методы такого класса получили названия прямых;
к ним относятся пользовавшиеся популярностью методы Крылова1,
Данилевского, Леверье и др.
Однако указанный подход становится неудовлетворительным, если
речь идет о вычислении собственных значений матриц, имеющих
порядок т в несколько десятков (и тем более сотен), т.е. матриц
довольно скромных по современным понятиям размеров.
1 Алексей Николаевич Крылов (1863-1945) - русский математик, механик и кораб
лестроитель, является авторо" первого в мировой научной литературе курса по числен
ным методам - изданных в 1911 г. «Лекций о приближенных вычислениях».
261](https://image.slidesharecdn.com/33379-160302054853/85/33379-262-320.jpg)
![§ 8.1. Постановка задачи. Некоторые вспомогательные сведения
можно было бы считать решенной. Дело в том, что у верхней тре
угольной матрицы
Ь11 Ь12 ··· b1m]
В= ~.. -~2·2·:-.-.~~~
о о ... ьтт
(8.5)
собственными числами являются элементы главной диагонали Ь;;·
В этом нетрудно убедиться, если записать характеристический мно
гочлен: det(B - ЛЕ) = (Ь 11 - Л.) (Ь22 - А.) ... (Ьтт - Л.).
Оказывается, что преобразованием подобия матрицу А можно при
вести к еще более простому виду, чем (8.5). Справедлива (см. [27]) еле-
дующая теорема.
Теорем а 8.1. Любую квадратную матрицу А с помощью преобра
зования подобия можно привести к следующему виду:
Л.1 0"1 о о ... о о
о Л.2 0"2 о о о
Р- 1АР= Л = о о Л.3 0"3 о о
(8.6)
..........................
о о о о ... Л.т- ат-
о о о о ... о л.т
Здесь Л. 1 , Л.2, ..., Лm - собственные числа матрицы А. Числа а; при
нимают одно из двух значений О или 1, причем если а; = 1, то обяза
тельно Л.; = Л.; + 1• 8
Матрица (8.6) называется жордановой формой матрицы А.
3. Матрицы простой структуры. В этой главе особое внимание
будет уделено матрицам простой структуры, т.е. матрицам, которые с
помощью преобразования подобия можно привести к диагональному виду:
p-•AP•D• ~".~~.:.~.]·о о ... л.т
(8.7)
263](https://image.slidesharecdn.com/33379-160302054853/85/33379-264-320.jpg)

![§ 8.1. Постановка задачи. Некоторые вспомогательные сведения
Теорема 8.8 означает, что задача вычисления собственных значений
симметричных матриц очень хорошо обусловлена. Следовательно,
в этом случае собственные числа надежно определяются заданием эле
ментов матрицы. К сожалению, для несимметричных матриц дело
обстоит совсем иначе. Хотя задача вычисления собственных значений
и в этом случае является устойчивой, для многих несимметричных
матриц собственные значения чрезвычайно чувствительны к погреш
ностям задания коэффициентов.
Пр им ер 8.4. Приведем принадлежащий Дж.Х. Уилкинсону [102]
пример матрицы, очень плохо обусловленной по отношению к про
блеме собственных значений.
Собственными числами верхней треугольной матрицы 20-го порядка
20 20 о о о о
о 19 20 о о о
А=
о о 18 20 о о
....................
о о о о ". 2 20
о о о о ... о 1
являются числа А. 1 = 1, А.2 = 2, Л.20 = 20. Заметим, что для этой
матрицы характеристический многочлен Р20 (А.) = (20 - А.)(19 - А.) ".
". ( - А.) совпадает с многочленом, рассмотренным в примере 3.8 в связи
с плохой обусловленностью его корней. Добавим малое Е к элементу
а20, 1= О. В результате характеристическое уравнение примет вид
(20 - Л.)(19 - А.)".( -А.)= 2О1 9Е.
При Е = 10-10 собственные значения возмущенной матрицы таковы:
А.~"" 0.996, л.; ""2.11, л.; ""2.57, л.; 5 ""3 97 ± .09i, л.; 7 ""5.89 ± l.95i,. .
л;, 9 ""8.12 ± 2.531, Л.~0• 11 "" 10.5 ± 2.731, Л.~2• 13 "" 12.9 ± 2.531, Л.~4• 15 ""
"" 15.1 ± 1.951, Л.~6• 17 "" 17.0 ± 1.091, Л.~8 "" 18.4, Л.~9 "" 18.9, л.;0 "" 20.0.
Как нетрудно видеть, большинство значений оказались полностью
искаженными. .&
Отметим, что число обусловленности cond(A) не характеризует обу
словленность матрицы А по отношению к проблеме собственных зна
чений. Оказывается, что такой характеристикой чувствительности соб
ственных значений относительно погрешности задания матрицы для
267](https://image.slidesharecdn.com/33379-160302054853/85/33379-268-320.jpg)




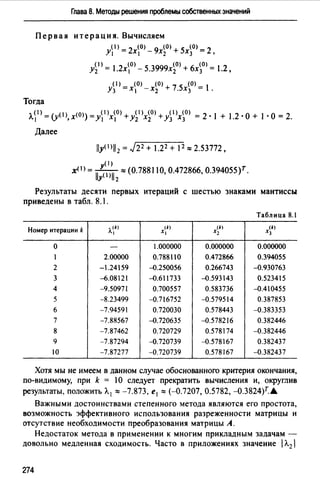
![Глава 8. Методы решения проблемы собственных значений
Если исходить непосредственно из определения собственного
вектора, то ej следует искать как нетривиальное решение однородной
системы уравнений
(8.24)
с вырожденной матрицей А - Л.jЕ. Однако Л.j известно лишь прибли
женно и в действительности при таком подходе вместо системы (8.24)
придется решать систему
(А -Л.}Е)х =О. (8.25)
Так как матрица А - Л.}Е заведомо невырождена, то решением системы
(8.25) является только х = О. Следовательно, непосредственное чис
ленное решение системы (8.25) не дает возможность вычислить собст
венный вектор.
Одним из эффективных методов вычисления собственных векторов
является метод обратных итераций. В этом методе приближения
к собственному вектору определяют последовательным решением
систем уравнений
(А - А]Е) y<k+ 1> = x<k>
с последующей нормировкой решения:
(k + 1)
x(k+ I) =~У___
i1y<k+1ъ.
(8.26)
(8.27)
В качестве начального приближения берут ненулевой вектор х<0>
с произвольно выбираемыми или даже случайными компонентами.
Часто удовлетворительным является выбор х<0> = ( l, l, .", l)r.
Чтобы понять механизм действия метода, рассмотрим случай, когда
А - матрица простой структуры, а- простое собственное значение.
Представим векторы х<0> и у< 1 > в виде линейных комбинаций собст-
т
х<0 > = "'с- е·~ 1 ,,
i=l
т
т
у< 1 >=}2а;е;.
i= 1
Так как (A-A.JE)y< 1>= }2а;(Л.;-А.j)е;, то систему уравнений (8.26)
i=I
при k = О можно записать в виде
т т
"' а· (Л.· - Л. ~ )е ·= "'с· е ·"-4 l 1 } 1 ~, ,.
i=I i=I
276](https://image.slidesharecdn.com/33379-160302054853/85/33379-277-320.jpg)
![§ 8.3. Метод обратных итераций
с;
Приравнивая коэффициенты при е;, nолучаем а;= - -•. Следова
л;-
тельно,
m С; ! [ m
у(!)=°"' - - е.= - - с-е·+""'
~ • 1 ' , . } } ~
i=I Л;-Лj ""j-""j i=I
;"j
Л·- Л~ ]} 1
--. с;е·.
Л.;- A.j 1
(8.28)
Если p"j - Л.J 1 « р",- - ЛJ 1 для всех i * }, то второе слагаемое
в nравой части формулы (8.28) мало по сравнению с первым.
с
Поэтому у<1 >::::: - 1-. ej и вектору(!) оказывается близким по направ
Лj-Лj
лению к собственному вектору ej"
Можно показать, что вектор x<k>, вычисляемый на k-й итерации,
имеет вид
[
т (Л· _Л.~)k ]x<k) = A(k) с-е· + °"' _1__1 с-е.
,... J J ~ А· - А.~ ' ' ,
i= 1 1 1
;"}
где 1~(k)1 --+ /cj11 при k --+ оо. Вектор x<k) сходится к ej по направ
лению со скоростью геометрической прогрессии, знаменатель которой
IЛ· -л~I
q=max 1 1 .
;"j /Л;-Л]/
Если абсолютная погрешность значения л.j• много меньше рас
стояния от Л.j до ближайшего из остальных собственных чисел (что экви
валентно выполнению условия 1Л.j - ЛJ 1 « 1Л.; - ЛJ 1 для всех i *}),
то метод обратных итераций сходится очень быстро. Чаще всего доста
точно сделать 1-3 итерации.
Пример 8.6. Использовав метод обратных итераций, найдем на
6-разрядном десятичном компьютере собственный вектор матрицы
(8.4), отвечающий собственному значению Л. 1 ::::: Л.~ = -7.8728.
Возьмем x<0J = (1, 1, 1)r. Тогда система (8.26) при k = О примет вид
9.8728yl - 9у2 + 5у3 = 1,
1.2у 1 + 2.4729у2 + 6у3 = 1,
У1 - У2 + 0.3728у3 = 1.
2П](https://image.slidesharecdn.com/33379-160302054853/85/33379-278-320.jpg)
![§ 8.4. QR-алгоритм
= Jl(k>-Л.jE являются 7i..j= Л.г л.; ,j = , 2, ..., т. В этом случае вместо
Л·
отношения ' ~ 1 скорость убывания поддиагонального элемента
Л;_ 1
- .-щ Л; Л; - Л.;
h i. i- 1 определяет величина --- = • ~ О. После нескольких ите-
Л; _ 1 Л.;_ 1 -Л,
-щ
раций QR-алrоритма, которые практически сделают элемент h ;, ;_1
равным нулю, следует выполнить обратный сдвиг, положив H(k) =
= fiщ + Л.jЕ. После выполнения этой операции матрицы А и н<k> снова
имеют общий набор собственных значений.
Последовательное осуществление сдвигов для i = т, т - 1, ..., 1,
сопровождаемых итерациями по QR-алгоритму, дает возможность
быстро привести матрицу А к виду (8.33). Остающийся невыясненным
вопрос о том, как получить приближенные значения л.; ~ Л.;, снимается,
если учесть, что в ходе QR-алrоритма диагональные элементы h~;> схо
дятся к Л; при k-+ оо. Следовательно, в качестве л.; можно, например,
брать элементы 1 h;;>.
Итак, прежде чем применять QR-алгоритм, следует преобразовать
исходную матрицу А к форме Хессенберга. Без такого преобразования
QR-алгоритм практически не применяется. Затем целесообразно
использовать один из вариантов QR-алгоритма со сдвигами.
Пусть теперь собственные значения найдены и требуется найти
один собственный вектор ej матрицы А, отвечающий собственному зна-
чению Л.j, или несколько собственных векторов. Тогда целесообразно
сначала найти соответствующий собственный вектор vj матрицы Н
(например, методом обратных итераций), а затем вычислить ej по
формуле ej = Р · vj, где Р - матрица подобия из (8.36).
Замечание 1. Вычисление собственного вектора ej непосред
ственным применением метода обратных итераций к матрице А
возможно, но потребует большего числа арифметических опера
ций по сравнению с указанным выше подходом.
1 Чаще всего в библиотечных програм1ах используется либо указанная стратегия
сдвигов (сдвигов по Рэ~ею), либо стратегия сдвигов по Ун.1кинсону (103].
283](https://image.slidesharecdn.com/33379-160302054853/85/33379-284-320.jpg)
![Глава 8. Методы решения nроблемы собственных значений
Замечание 2 Проведенное в этом параграфе обсуждение алго
ритма носило в значительной степени ознакомительный характер.
Практически не был затронут случай, когда матрица имеет кратные
или комплексные собственные значения Не рассматривались и осо
бенности применения QR-алгоритма для комплексных матриц.
Замечание 3 QR-алгоритм обладает хорошей обусловленно
стью Например, как показано в (23], в одном из его вариантов после
числа итерации, не превосходящего 5, для каждого собственного зна-
чения получаются приближения А.~, л.;, ...,л.:, являющиеся точны
ми собственными значениями некоторой матрицы А., такой, что
llA-A.llE ;$ 30т2 &JAllE,
(это утверждение сформулировано в терминах обратного анализа
ошибок).
§ 8.5. Допо.nните.nьные замечани1
1. В данной книге не рассмотрены некоторые весьма популярные
методы решения проблемы собственных значений. Изложение метода
бисекций, метода вращении Якоби, QL-алгоритма (являющегося вари
антом QR-алгоритма), LR-алгоритма и других методов можно найти,
напри>.1ер в (23, 24, 31, 75, 102, 103].
Авторы советуют обратить внимание на книги (49, 25•], содержащие
изложение современных численных методов решения проблемы собст
венных значений (в том числе, подробное обсуждение QR-алгоритма),
вполне доступное для студента или выпускника технического вуза.
2. Если А - заполненная матрица общего вида умеренного
порядка, то лучшим выбором для вычисления всех собственных зна
чений служит один из вариантов QR-алгоритма со сдвигами. Необ
ходимо только предварительно преобразовать матрицу к форме Хессен
берга Часто до этого производится уравновешивание (или
масштабирование) матрицы (49]
3 Когда А - симметричная матрица умеренного порядка, ее
обычно приводят сначала с помощью последовательных преобразо
ваний Хаусхолдера к трехдиагональному виду. Для вычисления собст
венных значений полученной трехдиагональной матрицы можно
использовать QR-алгоритм, но, по-видимому, чаще более предпочти
тельным является метод бисекций Одно из достоинств этого алго
ритма, состоит в том, что он позволяет находить не все собственные
значения, а одно или группу нужных собственных значений.
284](https://image.slidesharecdn.com/33379-160302054853/85/33379-285-320.jpg)
![§ 8.5. Дополнительные замечания
4 Если приближенное значение собственного числа найдено, то
подходящим методом вычисления соответствующего собственного
вектора является метод обратных итераций
5 Методы, которые используются в настоящее время для решения
проблемы собственных значений, когда А - разреженная матрица
большой размерности, можно разделить на две основные группы
методы одновременных итераций (или итерирования подпространства)
и методы типа Ланцоша Их обсуждение можно найти, например в [31,
49]. Один из простейших возможных подходов - степенной метод -
был рассмотрен в § 8.2
285](https://image.slidesharecdn.com/33379-160302054853/85/33379-286-320.jpg)
![§ 9.1. Задача одномерной минимизации
х
Рис. 9.1
Известно, что необходимым условием того, чтобы внутренняя для
множества Х точка х была точкой локального минимума дифференци
руемой функции/, является выполнение равенства
f'(x) =о. (9.1)
Число х ,удовлетворяющее этому равенству, называется стационарной
точкой функции f Конечно, не всякая стационарная точка х обязана
быть точкой локального минимума. Для дважды непрерывно диффе
ренцируемой функции достаточным условием того, чтобы стацио-
нарная точка х была точкой строгого локального минимума, является
выполнение неравенства f"(x) >О.
Существуют различные постановки задачи минимизации. В самой
широкой постановке требуется найти все точки локального минимума и
отвечающие им значения функции f В приложениях чаще всего воз
никает задача вычисления конкре1 ной точки локального минимума или
точки глобального минимума. Иногда представляет интерес только
лишь минимальное значение целевой функции, независимо от того,
в какой именно точке оно достигается.
2. Отрезок локализации. Подобно тому, как алгоритмы решения
нелинейных уравнений настроены на отыскание одного изолированного
корня (см. гл. 4), большинство алгоритмов минимизации осуществляет
лишь поиск точки локального минимума функции f Для того чтобы при
менить один из таких алгоритмов минимизации, следует предварительно
найти содержащий точку х отрезок [а, Ь], на котором она является един
ственной точкой локального минимума. Этот отрезок в дальнейшем
будем называть отрезком локализации 1 точки х .К сожалению, не суще
ствует каких-либо общих рецептов относительно того, как найти отрезок
локализации. В одномерном случае полезным может оказаться табулиро-
1 В теории оптимизации отрезок [а, Ь] чаще называют интервалом неопределенности.
Мы понимаем интервал неопределенности иначе (см. § 9.2).
287](https://image.slidesharecdn.com/33379-160302054853/85/33379-288-320.jpg)
![Глава 9. Методы одномерной минимизации
вание функции с достаточно мелким шагом и (или) построение
графика. Отрезок [а, Ь] может быть известен из физических сообра
жений, из опыта решения аналогичных задач и т.д. Для некоторых алго
ритмов (например, для метода Ньютона) достаточно иметь не отрезок
локализации, а хорошее начальное приближение х<0> к х .
Пр им ер 9.2. Для функции f(x) = х3 - х + e-r, произведем локали
зацию точек локального минимума.
Из графика функции, изображенного на рис. 9.2, видно, что функция
f(x) имеет две точки локального минимума х 1 и х2 , первая из которых
является и точкой глобального минимума. Для точки х 1 за отрезок лока
лизации можно принять отрезок (-4, -3), а для точки х 2 - отрезок [О, 1).
Докажем теперь, что на отрезке (О, 1) действительно содержится
точка локального минимума. Для этого заметим, что f'(x) = 3х2 - 1 - е-х
и f'(O) = -2 <О, f'(l) = 2 - е-1 >О. Так как значения /'(О) и f'(l) имеют
разные знаки, то на отрезке (О, 1] содержится точка х ,для которой
f'(x) = О. Но /"(х) = бх + е-х > О для всех х е (О, 1). Следовательно,
у
з 4 х
Рис. 9.2
288](https://image.slidesharecdn.com/33379-160302054853/85/33379-289-320.jpg)
![§ 9.1. Задача одномерной минимизации
/"(х) > О и точка х на отрезке [О, 1] есть единственная точка
локального минимума. Аналогично доказывается, что отрезок [--4, -3]
также является отрезком локализации. .А.
3. Унимодальные функций. Пусть f - функция, определенная на
отрезке [а, Ь]. Предположим, что на этом отрезке содержится единст-
венная точка х локального минимума функции f, причем функция
строго убывает при х ~ х и строго возрастает при х <:: х .Такая функция
называется унимодальной 1. Возможны три случая расположения точки
х на отрезке [а, Ь]: точка х является внутренней для отрезка, х сов
падает с левым концом отрезка и х совпадает с правым концом
отрезка. Соответственно и график унимодальной функции может иметь
одну из форм, схематично изображенных на рис. 9.3.
а ь х Q ь х
а) б) в)
Рис. 9.3
Замечание. Унимодальная функция, вообще говоря, не обя
зана быть непрерывной. Например, функция, изображенная на
рис. 9.4, унимодальна и имеет три точки разрыва.
~
1 r1
м1 1
1 1
Рис. 9.4
х
1 Иногда такую функцию называют строго унимодальной, а унимодальной называют
функцию, которая строго убывает nри х $ х 1 , равна постоянной nри х 1 $ х $ х2 и строго
возрастает nри х ~ х 2 [20).
289](https://image.slidesharecdn.com/33379-160302054853/85/33379-290-320.jpg)
![Глава 9. Методы одномерной минимизации
Приведем достаточное условие унимодальности функции на
отрезке [а, Ь].
Предложение 9.1. Если для всех х Е [а, Ь] выполнено условие
/"(х) >О, то функция унимодальна на отрезке [а, Ь]. •
Пр им ер 9.3. Функция /(х) = х3 - х + е-х унимодальна на каждом из
отрезков [-4, -3] и [О, 1]. Чтобы убедиться в этом, достаточно заметить,
что/"(х) = 6х +е-х >О для всех х Е [-4, -3], х Е [О, 1], и воспользо
ваться предложением 9.1. •
Для сужения отрезка локализации точки минимума унимодальной
функции полезно использовать следующее утверждение.
Предложение 9.2. Пусть f - унимодальная на отрезке [а, Ь]
функция и а $ а < у < 13 $ Ь. Тогда:
1° если /(а)$ /(/3), то х Е [а, j3];
2° если /(а)~ /(/3), то х Е [а, Ь];
3° если /(а)~ /(у) и /(у)$ /(/3), то х Е [а, /3].
Доказательство. 1°. Предположим противное: х > 13. Тогда
вследствие унимодальности f получим /(а) > /(/3), что противоречит
условию.
2°. Предположим противное: х < а. Тогда вследствие уиимодаль
ности /получим /(а)< /(/3), что противоречит условию.
3°. В силу п. 1° имеем х Е [а, j3], а в силу п. 2° имеем х Е [а, Ь].
Следовательно, х Е [а, /3].
Геометрическая иллюстрация пп. 1° и 2° приведена на рис. 9.5. •
1 1
11 :r а ь х
Нов•1й отрезок Новый отрезок
а) б)
Рис. 9.5
290](https://image.slidesharecdn.com/33379-160302054853/85/33379-291-320.jpg)
![§ 9.1. Задача одномерной минимизации
Многие алгоритмы одномерной минимизации построены в расчете
на то, что на отрезке локализации целевая функция унимодальна. В
частности, такими являются алгоритмы, рассматриваемые в § 9.3.
4. Об одном подходе к локализация точки минимума. На
практике часто бывает неизвестно, является ли данная функция унимо
дальной. Однако во многих случаях из дополнительных соображений
следует, что при х ~ х0 функция f сначала убывает, а затем, начиная с
некоторого значения х = х, становится возрастающей (правда, не
исключено, что далее она снова может стать убывающей). Для того
чтобы в таком случае локализовать точку х , используют различные
нестрогие методы. Один из распространенных подходов состоит в сле
дующем. Выбирают начальный шаг h > О, в несколько раз меньший
предполагаемого расстояния от точки х0 до точки х .Затем вычисляют
и сравнивают значения f(x0) и f(x1), где х 1 = х0 + h.
Если оказывается, что f(x0) > f(x 1), то последовательно вычисляют
значения функции f в точках xk = х0 + 2k - 1h для k ~ 2. После обнару
жения первой же точки, для которой f(xk) ~ f(xk + 1), за отрезок локали
зации принимают отрезок [xk- 1, xk+ 1]. В случае, изображенном
на рис. 9.6, а, за отрезок локализации принят отрезок [х2, х4].
Если же f(x0) ~ f(x1), то последовательно вычисляют значения
в точках xk = х0 + h/2k - 1, k ~ 2. После обнаружения первой же точки х"'
для которой f(xk) < /(хо), за отрезок локализации принимают отрезок
f(x0)
',,_,,
о) б)
Рис. 9.б
291](https://image.slidesharecdn.com/33379-160302054853/85/33379-292-320.jpg)
![Глава 9. Методы одномерной минимизации
Таблица 9.1
k о 1 2 3 4 5
xk -5 -4 8 -46 -4 2 -3 4 -1 8
f(xk) 28 4 15 7 6 74 -3 30 -5 94 2 02
[х0, xk _ 1). В случае, изображенном на рис. 9.6, б, за отрезок локали
зации принят отрезок [х0, х2].
Описанный метод не является строгим и не гарантирует, что отрезок
локализации всегда будет найден. Например, для функции, график
которой изображен штрихами на рис. 9.6, а, при выбранном шаге h
справедливы неравенства f(x0) > f(x1) > /(х2) > /(х3) > f(x4) и поэтому
отрезок локализации точки х обнаружен уже не будет. Тем не менее
этот или близкий к нему методы часто используются на практике.
Пр им ер 9.4. Локализуем указанным выше образом точку
локального минимума функции f(x) = х3 - х + е-х.
Возьмем х0 = -5, h = 0.2 и положим х1 = х0 + h = -4.8. Так как /(х0) :::::
::::: 28.4 > /(х 1 ) ::::: 15.7, то будем последовательно вычислять значения
функции f в точках xk = х0 + 2k - 1h. Из табл. 9.1 видно, что при k = 4
впервые выполняется неравенство f(xk) < f(xk ... 1). Поэтому за отрезок
локализации следует принять отрезок [х3, х5] = [-4.2, -1.8). А
§ 9.2. Обусnовnенность задачи минимизации
Пусть х - точка строгого локального минимума функции f, вычис
ляемой с погрешностью. Будем считать, что в некоторой окрестности
точки х вычисляемые приближенные значения /* (х) удовлетворяют
неравенству 1/(х) - ](х) / ::; Л = Л(f*), т.е. имеют границу абсолютной
погрешности, равную Л. Как нетрудно понять, существует такая малая
окрестность (х - Е, х + Е) точки минимума х, для которой, основы
ваясь на сравнении вычисляемых значений ] (х), нельзя достоверно
определить ту точку, в которой действительно достигается минимум
функции/ Эта ситуация схематично изображена на рис. 9.7. Интервал
(Х - Е, Х + Е ) будем называть интервалом неопределенности точки Х
локального минимума.
292](https://image.slidesharecdn.com/33379-160302054853/85/33379-293-320.jpg)
 > t•(x), т.е.
точка х перестанет попадать в интервал неопределенности. Имеем
f"(x)-/*(x)=f(x)-f(x) + (f·(x)-f(x))- (f·(x)-f(x)) ~
- f"(x) -
~f(x)-f(x)-2л~-2- (х-х)2 -2Л.
Следовательно,
t•(x)-f*(x) ~f"~x) (х-х)2 -2Л
и неравенство /•(х) > f"(x) выполнено, если (х - х)2 ~ 4Л//"(х).
Таким образом,
ё ~ 2JЛ/f"(х). (9.2)
Заметим, что любое приближение х• к х, попавшее в интервал неоп
ределенности, нельзя отличить от точного значения х точки минимума,
используя только вычисляемые значения ] функции f Поэтому
Л(х*} ~ 2Jлif*}lf"<x>. (9.3)
293](https://image.slidesharecdn.com/33379-160302054853/85/33379-294-320.jpg)

![Глава 9. Методы одномерной минимизации
На основании формулы (9.4) имеем
E1""Л1/f"(x,):::::2· J0-6 , Е1:::::Л2//"(х2):::::2• JО-1 . (9.6)
Заметим, что погрешности представления чисел х 1 , х 2 на 6-раз
рядном десятичном компьютере таковы: i:" I х 11 ::::: 2 · 1о-6 , i:" I х2 1 :::::
::::: 4 · 10-1. Поэтому полученные оценки (9.6) означают, что. решая урав
нение (9.5), можно найти точки х 1 и х 2 с максимальной для исполь
зуемого компьютера точностью, равной соответственно 2 · 10- 6 и 4 · 10-7
(ер. с результатом примера 9.5). .А.
§ 9.3. Методы пр1моrо поиска.
Оптимальный пассивный поиск.
Метод депени1 отрезка пополам.
Методы Фибоначчи и эопотоrо сечени1
Ряд методов минимизации основан на сравнении значений функции
/, вычисляемых в точках х 1 , х2, ..., хн- Эти методы часто называют
методами прямого поиска, а точки х, - пробными точками.
Прежде чем перейти к изложению некоторых из наиболее известных
методов прямого поиска, уточним постановку задачи. Будем считать,
что требуется найти приближение х • к точке минимума х унимо
дальной на отрезке [а, Ь] функции/. Предположим также, что число
пробных точек N заранее фиксируется и за приближение .х• к точке
минимума принимается одна из этих точек.
1. Оптимальный пассивный поиск. Метод решения поставленной
задачи, в котором задается правило вычисления сразу всех пробных
точек х1 , х2, ... , хн и за .х· принимается та точка xk, для которой f(xk) =
min /(х,), называется методом пассивного поиска. Соответст-
1,; 1,; .v
вующая геометрическая иллюстрация приведена на рис. 9.8.
xk-I xk xk+I хн Ь х
Рис. 9.8
296](https://image.slidesharecdn.com/33379-160302054853/85/33379-297-320.jpg)
![§ 9.3. Методы прямого поиска
Оценим погрешность этого метода. Для удобства положим х0 = а,
xN+ 1 = Ь и будем считать, что х0 Sx1<х2 < ... <xNSxN+ 1 • В силу выбора
точки :х• = xk справедливы неравенства f(xk- 1) ~ f(xk) и f(xk) $ f(xk + 1).
Поэтому из п. 3° предложения 9.2 следует, что х Е [xk _ 1, xk+ 1]. Значит
lx-xkl :;;max{xk-xk_ 1,xk+ 1 -xk}.
Так как положение точки минимума х на отрезке [а, Ь] заранее неиз
вестно, то для :х· = xk справедлива лишь следующая гарантированная
оценка погрешности:
lx-x•I $ max lx,-x,_ 11. (9.7)
1$1$N+1
Можно показать, что величина, стоящая в правой части неравенства
(9.7), станет минимальной, если точки х 1 , х2, ••• , xN расположить на
отрезке [а, Ь] равномерно в соответствии с формулой х, =а+ ih, где h =
= Л/(N + 1), Л = Ь - а. Метод с таким выбором пробных точек назы
вается оптимальным пассивным поиском. Гарантированная оценка
погрешности для него выглядит так:
1
- -.
1
Ь-а Л
х-х :;;--=--.
N+I N+I
(9.8)
Пр им ер 9.7. Используем оптимальный пассивный поиск для того,
чтобы найти с точностью Е = 0.1 точку х локального минимума
функции f(x) = х3 - х + е-х, локализованную на отрезке (О, 1].
Из (9.8) следует, что для решения задачи потребуется вычислить зна
чения функции в девяти пробных точках вида х, = 0.1 i, где i = 1, 2, ..., 9.
Приведем таблицу этих значений (табл. 9.2).
Таблица 9.2
х 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
у 0.81 0.63 0.47 0.33 0.23 0.17 0.14 0.16 0.24
Так как минимальное значение достигается в точке х1 = 0.7, то х =
= 0.7 ± 0.1. Если бы мы попытались найти х с точностью Е = 10-2, то
оптимальный пассивный поиск потребовал бы вычисления значений
функции уже в 99 точках. .&
2. Метод делении отрезка пополам. Пусть для решения постав
ленной задачи последовательно вычисляются значения функции f в N
пробных точках х 1 , х2, ••• , х№ причем для определения каждой из точек
xk можно использовать информацию о значениях функции во всех пре-
297](https://image.slidesharecdn.com/33379-160302054853/85/33379-298-320.jpg)
![Глава 9. Методы одномерной минимизации
дыдущих точках х 1 , х2, "., xk _ 1• Соответствующие методы называют
методами последовательного поиска. Рассмотрим простейший из
методов этого семейства - метод деления отрезка пополам. В нем,
как и в двух других рассматриваемых в этом параграфе методах
{методах Фибоначчи и золотого сечения), используется принцип после
довательного сокращения отрезка локализации, основанный на предло
жении 9.2 и на следующем простом утверждении.
Предложение 9.3. Если функция унимодальна на отрезке [а, Ь],
то она унимодальна и на любом отрезке [с, d] с [а, Ь]. •
Для удобства изложения обозначим отрезок [а, Ь] через [а<О>, ь<О>].
Поиск минимума начинают с выбора на отрезке[а<0>, ь<0>] двух симмет
рично расположенных точек
,...(О) -- а(О) + Ь(О) (0) а(О) + Ь(О)
"' 2 - cS, 13 = 2 + cS.
Здесь О < cS < (Ь - а)/2, cS - параметр метода. Далее вычисляют зна
чения /{а<0>) и /(13<0>). Сравнение этих значений в силу предложенИJI
9.2 позволяет сократить отрезок локализации следующим образом:
если /{а<0>) ~ /(13<0>), то х е [а(!), ь< 1>] = [а<О>, 13<0>];
если /(а<О)) > f{l3(0)), ТО Х Е [а(!), b(l)] = [а(О), Ь(О)].
Если описанную процедуру принять за одну итерацию метода
и продолжить аналогичные операции для построения последователь
ности сокращающихся отрезков локализации, то получим итерационный
метод. Опишем очередную его итерацию исходя из того, что отрезок
локализации [dk b(k)] уже найден.
Выполняют следующие действия:
) ВЫЧИСЛЯЮТ
a(k) =a(k) + b(k) - cS' f.l(k) =a<k) + ь<k) + cS.
2 t' 2 ,
2) находят значения j(a<k>) и j(13<k>);
3) новый отрезок локализации определяют по правилу:
если /{а<*>)~ f(l3<k>), то [а<*+ 1>, ь<k+ 1>] = [а<*>, 13<*>];
если /{а<*>)> /(13<*>), то [a<k +1>, ь<k + 1>] =[а<*>, ь<*>].
В первом случае за очередное приближение к точке минимума при
нимают x<k+ l) = a(k), а во втором случае x<k+ I) = 13<*> (рис. 9.9).
Обозначим через л<п> = ь<п> - а<п) длину отрезка [а<пJ, ь<п>]. Как
нетрудно заметить, справедливо равенство
298
л<п)
л<п+1>=2+Б. (9.9)](https://image.slidesharecdn.com/33379-160302054853/85/33379-299-320.jpg)
![§ 9.3. Методы прямого поиска
2Б
,_....._,
0 <k)--------..------ь<k)
1 a<kJ 1 1p(k) 1
1 1 1 1
1 1 1 1
1 1
: 0 (k+I) : a(k+I) p<k+I) Ь (k+I)
: : Первый
1 1 случай
0 (k+) a(k+I) p<k+I) Ь (k+I)
Второй
случай
Рис. 9.9
Поэтому, если параметр cS достаточно мал (cS « д<п>), то длина вновь
полученного отрезка почти вдвое меньше длины предыдущего отрезка.
Отсюда - и название метода.
Использовав равенство (9.9), с помощью метода математической
индукции легко показать, что
д<п> = (л - 2Б) + 2о.
2п
Заметим, что д(п) убывает и при п -+ оо стремится к значению 2cS,
оставаясь при каждом п больше него. Поэтому сделать при некотором п
длину д<п> отрезка локализации [а<п>, ь<п>] меньше заданного Е > О
можно лишь, выбрав о < Е/2. В этом случае из очевидной оценки
погрешности lх<п> - х 1 < д(п) следует, что значение х действительно
можно найти с точностью Е и справедлив следующий критерий окон
чания итерационного процесса. Вычисления следует прекратить, как
только окажется выполненным неравенство
Д(n) ~ Е. (9.1 О)
Тогда за приближение к х с точностью Е можно принять :х· = x<n>.
Замечание. При реализации метода на компьютере необхо
димо учитывать, что вычисления значений функции/ будут произ
водиться с погрешностью. Для того чтобы знак разности /°(а<п>) -
- f°(~<п>) совпадал со знаком разности f(а<п>) - f(~(nJ), необхо-
димо, чтобы выполнялось условие о ;;::::; & (см. равенство (9.2)).
Поэтому о нельзя задавать слишком малым.
Пр им ер 9.8. Применив метод деления отрезка пополам, найдем
с точностью Е = 10-2 точку х локального минимума функции f(x) = хз -
299](https://image.slidesharecdn.com/33379-160302054853/85/33379-300-320.jpg)
![Глава 9. Методы одномерной минимизации
Таблица 9.3
п a<•I ь<•) a<•J j(a(•I) 13<•) /(13<•1) л<•~
о 0.000000 1.000000 0.499000 о 232389 0.501000 0.230676 1.000
1 0.499000 1.000000 0.748500 0.143924 0.750500 0.144350 0.501
2 0.499000 0.750500 0.623750 0.154860 0.625750 0.154131 0.252
3 0.623750 0.750500 0.686125 0.140403 0.688125 0.140230 0.125
4 0.686125 0.750500 0.717088 0.139821 0.719088 0.139940 0.063
5 0.686125 0.719088 0.701607 0.139549 0.703607 0.139520 0.033
6 0.701607 0.719088 0.708348 0.139543 0.711348 0.139587 0.017
7 0.710141 0.719813 - - - - 0.010
-х + е-х локализованную на отрезке [О, l]. Вычисления будем вести на
6-разрядном десятичном компьютере.
Зададим о = 1о-3, а<0> = О, Ь(О) = l.
1-я итерация.
l. Вычислим:
а(О) + Ь(О) а(О) + Ь(О)
а<0>= 2 -о=О.499, р<0>= 2 +о=О.501.
2. Определим значения f(a<0>)::::: 0.232389, /(13<0>)::::: 0.230676.
3. Так как f(a<0>) > лр<0>), то следует положить [a(I>, b(I)] = [0.499, 1].
Результаты следующих итераций приведены в табл. 9.3.
Так как л(7) ~ &, то при п = 7 итерации прекратим и положим х :::::
::::: р<п> = 0.711348. Таким образом, х = 0.71±0.01. Заметим, что для дос
тижения точности & = l0-2 потребовалось 14 вычислений функции. .А.
3. Метод Фибоиаччи. Заметим, что метод деления отрезка пополам
требует на каждой итерации вычисления двух новых значений
функции, так как найденные на предыдущей итерации в точках а<п> и
р<п> значения далее не используются. Обратим теперь внимание на то,
что одна из этих точек (обозначенная в предыдущем пункте через х<п>)
является внутренней для отрезка [а<п>, ь<п)] и поэтому дальнейшее
сокращение отрезка можно произвести, вычислив дополнительно зна
чение функции лишь в одной новой точке. Это наблюдение приводит к
методам, требующим на каждой итерации (кроме первой) расчета лишь
одного нового значения функции f Два наиболее известных среди них -
методы Фибоначчи и золотого сечения.
300](https://image.slidesharecdn.com/33379-160302054853/85/33379-301-320.jpg)
![§ 9.3. Методы прямого поиска
Метод Фибоначчи 1 является оптимальным последовательным
методом, т.е. методом, обеспечивающим максимальное гарантиро
ванное сокращение отрезка локализации при заданном числе N вычис
лений функции. Этот метод основан на использовании чисел Фибо
наччи Fn, задаваемых рекуррентной формулой
Fn = Fn _ 1 + Fn _2 (п Z 2)
и начальными значениями F0 = 1, F 1 = 1. Укажем несколько первых
чисел: F0 = 1, F 1 = 1, F2 = 2, F3 = 3, F4 = 5, F5 = 8, F6 = 13, F7 = 21,
F8 = 34, F9 = 55, F10 = 89, F11 = 144.
Метод Фибоначчи состоит из N - 1 шагов. Очередной (k + 1)-й шаг
выполняют здесь аналогично (k + 1)-й итерации метода деления отрезка
пополам. В отличие от него точки a<k ~(k) здесь находят по формулам
F F
a(k) = a(k) + ~ Л(k) ~(k) =a<k> + ~ Л(k).
FN-k+ 1 FN-k+ 1
Новый отрезок локализации определяют по тому же правилу:
если f(a(k)) $ f(~(k)~ то [a<k + 1), b(k + 1)] = [a<k>, ~(k)];
если f(a<k)) > f(p<k>), то [a<k + 1), ь<k+ 1)] = [a<k>, ь<k>].
В первом случае за очередное приближение к точке минимума при
нимают x<k + 1) = a<k), а во втором случае x<k+ 1>= ~(k) (рис. 9.1 О).
Важно то, что в любом случае точка x<k+ I) совпадает с одной из точек
F
a<k+J)=a(k+l)+ N-k-2 л<k+IJ,
FN-k
F
~(k+ 1) =a<k+ t) + N-k-1 л<k+ 1).
FN-k
а (k)
1а<*> 113<k)
ь<t>
1 1
1 1 1 1
1 1 1 1
1 ;
a<k+) f ll(k+l)
11
1 а (k+)1 ь<k+t>
1 1 1
Первый1 1 1
1 1 1 случай
t ' t t
о (k+J) a<k+I) 13<k+I) ь (k+I/
Второй
случай
Рис. 9.10
1 Фибоначчи (Леонардо Пизанский) (1180--1240)- итальянский математик.
301](https://image.slidesharecdn.com/33379-160302054853/85/33379-302-320.jpg)
![Глава 9. Методы одномерной минимизации
Поэтому на очередном шаге достаточно вычислить значение функции
лишь в одной недостающей точке.
В результате выполнения N - 1 шагов отрезок локализации умень
шается в FN + /2 раз, а точка x(N - 1) оказывается центральной для
последнего отрезка локализации [a<N - 1), ь<N - 1)]. Поэтому для x<N - 1)
справедлива следующая оценка погрешности:
1Х - x<N - 1) 1 ~ _l_ Л .
FN+ 1
(9. 11)
Пр им ер 9.9. Применив метод Фибоначчи, найдем с точностью Е =
= 10-2 точку х локального минимума функции /(х) = х3 - х + е-х, лока
лизованную на отрезке [О, 1]. Вычисления будем вести на 6-разрядном
десятичном компьютере.
Первым среди чисел Фибоначчи, для которого выполняется условие
ЛIFN+ 1 < Е (где Л =),является число F 11 = 144, отвечающее N = 10.
Зададим а<0> = О, Ь(О) = .
Первый шаг.
1. Вычислим
F9 55
а(О) = а(О) + (Ь(О) _ а<0>) - =- "'о 381944
F 11 144 . '
j3(0) = а(О) + (Ь(О) - а<О>) ; 10 = 18~ "'0.618056.
11
2. Определим значения /(а<О>)"' 0.356308, J(J3<0>) "' 0.157028.
3. Так как j(a<0>) > f(j3(0>), то положим [a(I>, b(I)] = [а<О), Ь(О)].
Второй шаг.
1. С учетом того, что аО> = 13<0>"' 0.618056, найдем:
J3<1) =аО> + (b<1)-a0>)F9/F10 "' 0.763889.
2. Вычислим значение /(j3(1>)"' 0.147712.
3. Так как /(аО)) > /(j3(1>), то положим [ащ, Ь<2>] = [a(I>, ЬО>].
Результаты остальных шагов приведены в табл. 9.4.
После девяти шагов вычисления прекращаем и полагаем х "' 13<8>=
= О.708334. Таким образом, х = О. 71 ± О.О 1. Заметим, что для дости
жения точности Е = 1о-2 потребовалось десять вычислений значения
функции, в то время как при использовании метода деленИJ1 отрезка
пополам необходимо 14 вычислений. 6.
302](https://image.slidesharecdn.com/33379-160302054853/85/33379-303-320.jpg)
![§ 9.3. Методы прямого поиска
Таблица 9.4
п а<•> ь<•> a<•J /(а<•)) pt•) J(p<•>) л<•>
о 0.000000 1.000000 0.381944 0.356308 0.618056 0.157028 1.000
1 0.381944 1.000000 0.618056 0.157028 0.763889 0.147712 0.618
2 0.618056 1.000000 0.763889 0.147712 0.854167 0.194672 0.382
3 0.618056 0.854167 0.708334 0.139527 0.763889 0.147712 0.236
4 0.618056 0.763889 0.673611 0.141905 0.708334 0.139527 0.119
5 0.673611 0.763889 0.708334 0.139527 0.729167 0.140830 0.090
6 0.673611 0.729167 0.694445 0.139805 0.708334 0.139527 0.056
7 0.694445 0.729167 0.708334 0.139527 0.715278 0.139731 0.035
8 0.694445 0.715278 0.701389 0.139553 0.708334 0.139527 0.021
9 0.701389 0.715278 0.708334 - 0.708334 - 0.014
Хотя метод Фибоначчи и оптимален в указанном выше смысле, часто
он неудобен для использования. В частности, это касается возможного
применения поиска Фибоначчи для решения одномерных подзадач в
алгоритмах многомерной минимизации. Здесь нередко эффективность
алгоритма одномерной минимизации оценивается не по тому, какая точ-
ность в значении х получена, а совсем по другим критериям, к которым
метод плохо приспособлен. Например, бывает важно достигнуть мини
мального значения функции f с некоторой относительной точностью о
либо уменьшить значение f на определенную величину.
Кроме того, число выполняемых итераций заранее фиксируется, что
удобно далеко не всегда.
4. Метод золотого сечения. Из-за указанных недостатков вместо
метода Фибоначчи чаще используется теоретически почти столь же
эффективный метод золотого сечения.
Напомним, что золотым сечением 1 отрезка называется такое раз
биение отрезка на две неравные части, что отношение длины всего
отрезка к длине его большей части равно отношению длины большей
части к длине меньшей части отрезка.
Золотое сечение отрезка [а, Ь] осуществляется каждой из двух сим
метрично расположенных относительно центра отрезка точек
2 2
а=а+-- (Ь-а), ~=а+-- (Ь-а)
3+Js 1+Js
1 Термин «Золотое сечение» ввел Леонардо да Винчи. Принципы золотого сечения
широко использовались при композиционном построении многих произведений мирового
искусства (в особенности, архитектурных сооруженнй античности и эпохи Возрождения).
303](https://image.slidesharecdn.com/33379-160302054853/85/33379-304-320.jpg)
![Глава 9. Методы одномерной минимизации
~
а а ~ Ь
(9.12) Рис. 9.11
(рис. 9.11 ). Действительно, как нетрудно проверить,
b-a=b-a=J+j5 b-a=p-a=J+j5
Ь-а а-а 2 р-а Ь-р 2
Замечательно то, что точка а осуществляет золотое сечение не
только отрезка [а, Ь], но и отрезка [а, j3]. Действительно,
p-a=~=1+J5
а-а р-а 2
Точно так же точка 13 осуществляет золотое сечение не только отрезка
[а, Ь], но и отрезка [а, Ь]. Этот факт далее существенно используется.
Очередная (k + 1)-я итерация метода золотого сечения производится
аналогично (k + 1)-й итерации метода деления отрезка пополам. В
отличие от него точки a<k>, j3(k) находятся по формулам
2
a<k> = a<k) + - - Л(k)
3 + J5 ,
13<*> = a<k> + _2_ л<k>.
1+Js
Важно то, что какой бы из отрезков [a<kJ, j3(k)] или [a<k>, b(k)] не был
бы выбран за очередной отрезок локализации, точка x<k + 1> (в первом
случаех<k+ I) = a<k>, а во втором случаех<k+ I) = j3<k>) совпадает с одной
из точек а<* + 1), 13<k + 1>. Поэтому на очередном шаге достаточно
вычислить значение функции лишь в одной недостающей точке.
Заметим, что точка х<п> отстоит от концов отрезка [а<п>, ь<п>] на
2
величину, не превышающую ----r; л<п>, поэтому верна оценка
1 + -J5
lx(n)_xl ~-2- Л(п)=Л(п+I),
1 + J5
(9. I2)
которую можно использовать для апостериорной оценки погрешности.
Заметим, что каждая итерация сокращает длину отрезка локализации
в ( 1+ J5 )12 раз. Поэтому ь<п> - а<п> = л<п> = (2/( 1+ J5))пЛ и спра
ведлива следующая априорная оценка погрешности:
lx<п>-xl ~ - 2- Л.[ ]
п+ 1
1 + J5
(9.13)
304](https://image.slidesharecdn.com/33379-160302054853/85/33379-305-320.jpg)
![§ 9.3. Методы прямого поиска
Таким образом, метод золотого сечения сходится со скоростью гео
метрической прогрессии, знаменатель которой q = 2/( 1+ J5)"' 0.62.
Пример 9.10. Найдем методом золотого сечения с точностью & =
= 10-2 точку х локального минимума функции f(x) =х3 - х + е-х лока
лизованную на отрезке [О, 1].
Положим а<0> = О, Ь(О) = 1.
1-я итерация.
1. Вычислим:
а(О) = а<О> + - 2- (ь<0> - а<0>) "' 0.381966,
3 + J5
р<О) = а<О> + - 2- ( Ь(О) - а<О>)"' 0.618034.
1 +Js
2. Найдем f(a(O))"' 0.356280, f(p(O))"' 0.157037.
3. Так как J(a<0>) > лр<О)), то положим (a(l), b(I)] = [а<О>, Ь(О)].
2-я итерация.
. Учтем, что а< 1 > = р<0>"' 0.618034, и вычислим:
p(t) = 0 (1) + - 2- (ЬО>- аО>)"' 0.763936.
1 +Js
2. Определим ЛР(l))"' 0.147725.
3. Так как f(a(l>) =J(p<0>) > /(р< 1 >), то положим [а(2), Ь(2)) =[a(l>, b(l>].
Результаты остальных итераций приведены в табл. 9.5.
Таблица 9.5
п tJ.•) ь<•) а<•) /(а<•)) 13<•) л13<•)> л<•+ 1)
о 0.000000 1.000000 0.381966 0.356280 0.618034 0.157037 0.618
1 0.381966 1.000000 0.618034 0.157037 0.763936 0.147725 0.382
2 0.618034 1.000000 0.763936 0.147725 0.854102 0.194622 0.236
3 0.618034 0.854102 0.708204 0.139526 0.763936 0.147725 0.146
4 0.618034 0.763936 0.673764 0.141883 0.708204 0.139526 0.090
5 0.673764 0.763936 0.708204 0.139526 0.729493 0.140868 0.056
6 0.673764 0.729493 0.695051 0.139774 0.708204 0.139526 0.034
7 0.695051 0.729493 0.708204 0.139526 0.716337 0.139782 О.о21
8 0.695051 0.716337 0.703182 0.139525 0.708204 0.139526 0.013
9 0.695051 0.708204 - - - - 0.008
Так как Л(IО) < &, то итерации следует прекратить и положить х ""
"' а<8> "' О.703182. Таким образом, х = О.70 ± О.О 1. Отметим, что для
достижения точности & = 10-2 потребовалось десять вычислений зна
чений функции, как и в методе Фибоначчи. .&
305](https://image.slidesharecdn.com/33379-160302054853/85/33379-306-320.jpg)
![Глава 9. Методы одномерной минимизации
5. Эффективность методов прямого поиска. Эффективность ука
занных методов можно оценивать, например тем, во сколько раз умень
шается после использования N вычислений значений функции первона
чальная длина Л отрезка локализации. Другой критерий - значение
гарантированной оценки погрешности. Данные табл. 9.6 позволяют
сравнить по этим критериям рассмотренные выше методы. Как видно,
очень неэффективен пассивный поиск. Метод деления отрезка пополам
уступает почти эквивалентным по эффективности методам Фибоначчи
и золотого сечения.
Метод прямого поиска
Оптимальный пассивный
поиск
Метод деления отрезка
пополам (N - четное,
величиной 8 пренебрегаем)
Метод Фибоначчи
Метод золотого сечения
Длина отрезка
локализации
2
N+lЛ
2
- - Л ::о 1 7 • (0.62)N • Л
FN+I
- 2 - Л"'16·(062)N•Л[ ]
N- 1
1+Л
Таблица 9.6
Гарантированная
оценка погрешности
"' 0.5 • (0.71 )N • Л
"'0.85 • (062)N • Л
"' (О 62)" · Л
Приведем еще одну таблицу (табл. 9.7), из которой видно, сколько
вычислений значений функции f нужно сделать для того, чтобы дос
тигнуть точности Е. Предполагается, что начальный отрезок локали
зации имеет единичную длину.
Таблица 9.7
Метод прямого поиска
Число N при заданном Е, равном
10-1 10-2 10-3 I0-4 10-s
Оптимальный 9 99 999 9999 99999
пассивный поиск
Метод деле.~ия отрезка 6 12 18 26 32
пополам (8 « Е)
Метод Фибоначчи 5 10 15 19 24
Метод золотого сечения 5 10 15 20 24
6. Влияние погрешности вычислений. Одна из самых распро
страненных ошибок при обращении к стандартным программам, реали-
306](https://image.slidesharecdn.com/33379-160302054853/85/33379-307-320.jpg)
![§ 9.4. Метод Ньютона и другие методы минимизации гладких функций
зующим тот или иной метод на компьютере, состоит в завышении тре
буемой точности. Необходимо понимать, что при наличии погрешностей
в вычислении значений функции / достижимая точность Е методов
прямого поиска ограничена снизу величиной € ""2JЛ(f*)//"(х), где
€ - радиус интервала неопределенности (см. § 9.2). Это означает,
например, что прямые методы не позволяют найти на 6-разрядном
десятичном компьютере точку х 2 локального экстремума функции
/(х) = х3 - х + е-х с точностью Е < €2 ""2 • I0-4• Задание Е < Е 2 при
ведет лишь к бесполезной трате машинного времени.
§ 9.4. Метод Ньютона и другие методы
минимизации гладких функций
Отметим, что применение рассмотренных выше методов деления
отрезка пополам, Фибоначчи и золотого сечения не позволяет извлечь
никакой выгоды из возможной гладкости функции. Существуют
методы, которые могут оказаться более эффективными, если миними
зируемая функция достаточно гладкая. Часть из них является просто
модификациями известных методов решения нелинейных уравнений
(см. гл. 4) применительно к необходимому условию экстремума
/'(х) =О. (9.14)
1. Метод бисекции. Пусть/ - унимодальная непрерывно диффе
ренцируемая на отрезке [a(OJ, Ь(О)] = [а, Ь] функция и на отрезке [а, Ь]
точка х является единственной стационарной точкой. Применительно
к решению уравнения (9.14) одна итерация метода бисекции выглядит
следующим образом.
Пусть отрезок локализации [a(nJ, ь<п)] известен и найдено значение
х<п) = (а(п) + b(n>)t2. Тогда производят следующие действия:
1) вычисляют значение f'(x<n>);
2) если f'(x(n>) < О, то полагают [а<п + 1), ь<п + IJ] = [х<пJ, ь<пJ]. В про
тивном случае полагают [а(п + IJ, Ь(п + 1)] = [а<п>, х<п)];
3) вычисляют х<п + 1) = (а<п + 1) + Ь(п + 1))/2.
В рассматриваемом случае метод сходится с оценкой погрешности
(9.15)
и обладает всеми присущими методу бисекции решения нелинейных
уравнений достоинствами и недостатками (см. § 4.3). Возникает лишь
307](https://image.slidesharecdn.com/33379-160302054853/85/33379-308-320.jpg)
![Глава 9. Методы одномерной минимизации
дополнительная проблема, связанная с необходимостью вычисления
производной f'
2. Метод Ньютона. Для решения уравнения (9.14) можно попы
таться воспользоваться методом Ньютона (см. § 4.6), расчетная
формула которого в данном случае принимает вид
/'( (n>)
x(n+l)=x(n) __x__ п~О. (9.16)
/"(х(п))'
Следствием теоремы 4.6 является следующее утверждение
Теорема 9.1. Пусть в некоторой окрестности точки х функция
f трижды непрерывно дифференцируема и выполняется условие
f"(x) >О. Тогда найдется такая малая а-окрестность корня х, что
при произвольном выборе начального приближения х(О) из этой сr-окре
<-тности метод Ньютона (9 16) сходится квадратично. •
В силу сверхлинейной сходимости для метода Ньютона можно
исполь·ювать следующий критерий окончания итераций:
lx(n) _x(n-1)1 < Е. (9.17)
Пример 9.11. Использовав метод бисекции, найдем с точностью
Е = 10-2 точку локального минимума функции /(х) = х3 - х + е Х, лока
лизованную на отрезке [О, 1].
Положим а<0> = о, Ь(О) = 1, x<0J = (а<0> + ь<0>)12 = о 5. Заметим, ЧТО
f'(x) = 3х2 - 1 - е-х.
1-я итерация.
1) ВЫЧИСЛИМ f'(x<O>)::::: -0.856531;
2) так как /'(х<0>) <О, то [a(I>, ь<I)] = [х<0>, ь<0)];
3) вычислим х< 1 > = (а< 1 > + ь< 1 >)/2 =О 75.
Результаты остальных итераций приведены в табл. 9.8
п tf•) b(ll) x!n) f'(x<·~
о 0.000000 1 000000 0.500000 -0.856531
1 0.500000 1 000000 о. 750000 0.215133
2 0.500000 о 750000 0.625000 -0.363386
3 0.625000 о 750000 0.687500 -0.084863
4 0.687500 о 750000 0.718750 0.062444
5 0.687500 о 718750 о. 703125 -0.011882
6 0.703125 о 718750 0.710938 -
308
Таблица 9.8
(b<•J-a<•>)/2
0.500
0.250
0.125
0.063
0.031
0.016
0.008](https://image.slidesharecdn.com/33379-160302054853/85/33379-309-320.jpg)
![§ 9.4. Метод Ньютона и другие методы минимизации гладких функций
После выполнения шести итераций вычисления можно прекратить
и положить х ::=х<б>. Таким образом, х =0.71±0.01. Отметим, что для
достижения точности t = l0-2 потребовалось шесть вычислений зна
чения производной /'(х) А
Пример 9.12. Использовав метод Ньютона, найдем с точностью
t = l о-6 точку локального минимума функции /(х) = х3 - х + е-х, лока
лизованную на отрезке [О, l].
Положим х<О> = 0.5. Результаты вычислений по формуле (9.16),
имеющей в данном случае вид
3(x<n))2 - 1- е-х<п>x<n + 1) =х(п) _ ......__..______
6x(n) + е-х<п> '
приведены в табл. 9.9.
Таблица 9.9
п х/•) lx/•) -х<•- I) 1
о 0.5000000
0.7374944 2· 10-1
2 0.7062126 3. 10-2
3 0.7056421 6. lo-4
4 0.7056419 2 • lo-7
При п =4 итерации прерываются. Можно считать, что х =О.705642 ±
± 10--{;. Заметим, что точность & = 10-2 была достигнута уже после
выполнения двух итераций. .А
3. Метод последовательной параболической интерполяции. Эrот
метод предназначен для минимизации гладких функций, но в отличие от
методов бисекции и Ньютона не требует вычисления производных.
Опишем одну итерацию простейшего варианта этого метода. Пред
положим, что уже известны три предыдущих приближения x<k - 2), x<k - 1),
x(k) к точке х. Пусть у = Р2(х) = m<k) + п<k>(х - x<k>) +p<k>(x - x<k>)2 -
309](https://image.slidesharecdn.com/33379-160302054853/85/33379-310-320.jpg)
![Глава 9. Методы одномерной минимизации
уравнение параболы, проходящей через три точки плоскости с коорди
натами (x(k - 2), J(x<k - 2>)), (x<k - 1>, j(x(k - 1>)), (x<k>, j(x(k>)). Здесь
п(k) = x<k- 1) - x(k) J(x<k>) - f(x<k- 2>) +
x<k- l)_x(k-2) x(k) _x(k-2)
t(k) _ x<k- 2) !(x<k-1 >) _!(x<k>)
+ •x<k-1)_x(k-2) x<k-)_x(k)
1 [fl._x(k- 1>) _!(x<k>) f (x<k>) _/(x<k- 2>)]
p(k)= - .
x<k-l)_x(k-2) x<k-1)_x(k) x<k>-x<k-2)
За очередное приближение x<k + 1) к х принимается та точка, в
которой функция Р2(х) достигает минимума. Из уравнения
P],(x<k + 1>) = 2p(k)(x<k+ 1) - x<k)) + п<kJ = О
получается формула
п<k)
x(k+J=x(k) ___
2p(k).
(9.18)
Естественно, что для начала работы этого метода требуется выбор
трех начальных приближений х<О>, хО), х<2>.
Пусть функция/трижды непрерывно дифференцируема в некоторой
окрестности точки х и удовлетворяет условию f"(x) > О. Можно
показать, что в этом случае выбор начальных приближений х<О>, x(I >, х<2)
из достаточно малой окрестности точки х гарантирует, что p(k) *О для
всех k и метод последовательной параболической интерполяции схо
дится сверхлинейно, с порядком, приближенно равным 1.324. Поэтому
в качестве критерия окончания итерационного процесса можно
принять неравенство (9.17).
Отметим, что в описанном методе используются только значения
функции f, вычисляемые в точках x<k>. Поэтому (как и для методов
прямого поиска) при его реализации на компьютере достижимая точность
метода ограничена снизу значением, равным радиусу & интервала неоп
ределенности. После того как очередное приближение х<п> попадет
в интервал (х - &, х + Ё ), дальнейшие вычисления теряют смысл (см.
§ 9.2).
Существуют различные модификации метода последовательной
параболической интерполяции. Одна из них, например обеспечивает
принадлежность очередного приближения предыдущему отрезку лока-
лизации и дает последовательность стягивающихся к точке х отрезков.
310](https://image.slidesharecdn.com/33379-160302054853/85/33379-311-320.jpg)
![§ 9.5. Дополнительные замечания
4. Гибридные алгоритмы. Лучшими среди универсальных
методов одномерной минимизации считаются так называемые гиб
ридные (или регуляризованные) алгоритмы. Они представляют собой
комбинации надежных, но медленно сходящихся алгоритмов типа
бисекции (если возможно вычисление f'(x)) или золотого сечения с
быстро сходящимися методами типа последовательной параболической
интерполяции или Ньютона. Эти алгоритмы обладают высокой надеж
ностью и гарантированной сходимостью, причем сходимость стано
вится сверхлинейной, если в окрестности точки строгого минимума
функция f достаточно гладкая.
Примером эффективного гибридного алгоритма является алгоритм
FMIN, изложенный в [106]. Алгоритм FMIN осуществляет поиск
минимума методом золотого сечения, переключаясь по возможности на
параболическую интерполяцию.
§ 9.5. Допоnнитеnьные замечаниw
1. Дополнительную информацию о методах одномерной миними
зации можно найти, например в [20].
2. Описанные выше методы приспособлены, как правило, для
минимизации унимодальных функций. Если эти методы применить для
минимизации непрерывной функции, не являющейся унимодальной на
рассматриваемом отрезке, то мы получим, вообще говоря, лишь точку
локального экстремума. Поэтому такие методы часто называют
локальными методами минимизации. К настоящему времени разра
ботан ряд методов, которые предназначены для поиска глобального
минимума. С некоторыми из них можно ознакомиться в [20].
З. Решение задачи минимизации существенно усложняется, если на
значения функции накладываются случайные ошибки (помехи). Так
бывает, например, тогда, когда значения функции получают в
результате измерений какой-либо физической величины. В том случае,
когда ошибки являются случайными величинами и обладают опреде
ленными вероятностными характеристиками, для поиска минимума
можно использовать метод стохастической аппроксимации. Понятие
об этом методе можно получить из [20]; там же содержатся ссылки на
соответствующую литературу.
311](https://image.slidesharecdn.com/33379-160302054853/85/33379-312-320.jpg)
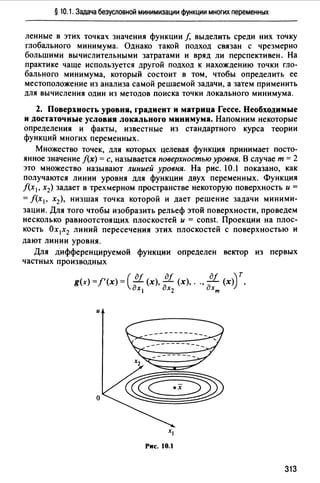
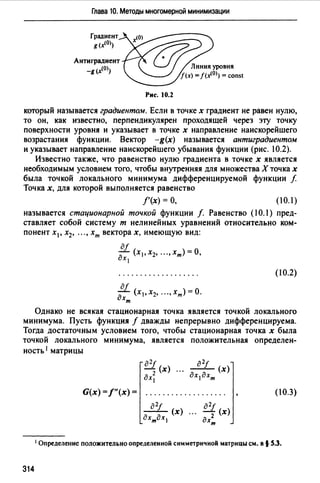

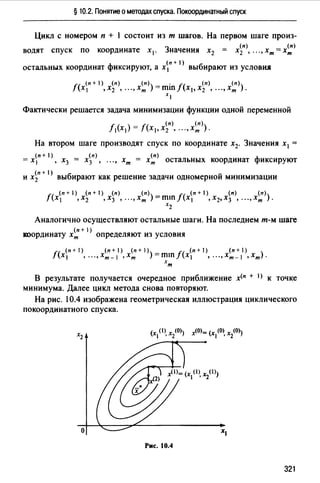
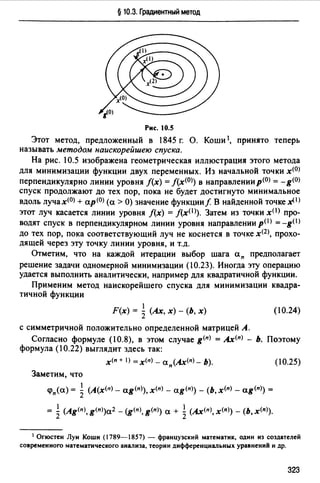

![§ 10.З. Градиентный метод
( 16 8)Тх(2) =x(I) - а g(I) = - -
1 9, 9
Можно показать, что для всех п ;;:: 1 на п-й итерации будут получены
значения
g<п)= ~: (1,(-l)")r, ап=j, х<п)=х-~ (2,(-l)n)r.
Заметим, что Jх<п) _ х 1 = J5 --> О при п--. оо. Таким образом, после-3п
довательность х<пJ, полученная методом наискорейшего спуска, сходится
со скоростью геометрической прогрессии, знаменатель которой q = 1/3.
На рис. 10.5 изображена именно та траектория спуска, которая была
получена в данном примере. .&
Для случая минимизации квадратичной функции справедлив сле
дующий общий результат [20].
Теорема 10.1. Пусть А - симметричная положительно опреде
ленная матрица и минимизируется квадратичная функция (10.24). Тогда
при любом выборе начального приближения метод наискорейшего спуска
(10.25), (10.26) сходится и верна СТ/едующая оценка погрешности:
Jx<п>-xJ::;; Jcond2(A) qn Jx<0>-xl (10.27)
cond2(A) - 1 Л.mах
Здесь q = d (А)+ 1 < 1, где cond2(A) = ,-- , а "-mш и "-max - мини-
соn 2 ""mш
мальное и максимальное собственные значения матрицы А. 8
Отметим что этот метод сходится со скоростью геометрической
прогрессии, знаменатель которой равен q. Если "-mш и Лmах близки, то
cond2(A) - 1 и q мало. В этой ситуации метод сходится достаточно
быстро. Например, в примере 10.1 имеем "-mш = 2, "-max = 4 и поэтому
cond2(A) = 2, q = (2 - 1)/(2 + 1) = 1/3. Если же "-mш « "-max' то
condiA) » 1, q "" 1 и следует ожидать медленной сходимости метода
наискорейшего спуска.
Пр и мер 10.2. Применение метода наискорейшего спуска для
минимизации квадратичной функции /(х1, х2) = х7 + lOx;- 4х1 -4х2
при начальном приближениих<0> =(О, О)т дает последовательность при
ближений х<п> = x-2(9/1)n(l,(-l)п)r, где х = (2, 0.2)r. Траектория
спуска изображена на рис. 10.6.
325](https://image.slidesharecdn.com/33379-160302054853/85/33379-326-320.jpg)
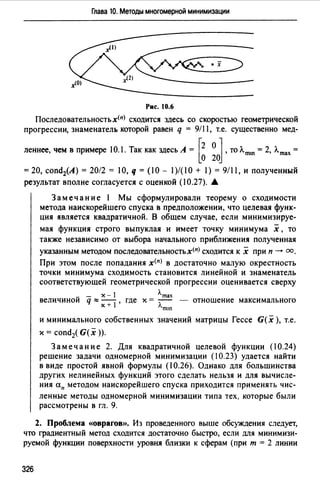
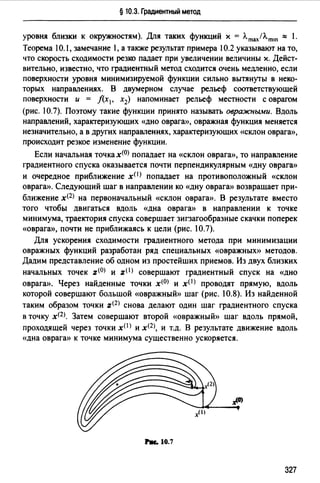
![Глава 10. Методы многомерной минимизации
Рис. 10.8
Более подробную информацию о проблеме <<Оврагов» и «Овражных»
методах можно найти, например в (9, 20].
3. Другие подходы к определению шага спуска. Как нетрудно
понять, на каждой итерации было бы желательно выбирать направ
ление спуска р <11>, близкое к тому направлению, перемещение вдоль
которого приводит из точких<11> в точку х. К сожалению, антиградиент
р<11> =-g<11>является, как правило, неудачным направлением спуска. Осо
бенно ярко это проявляется для овражных функций. Поэтому возникает
сомнение в целесообразности тщательного поиска решения задачи
одномерной минимизации (10.23) и появляется желание сделать в
направлении р<11> лишь такой шаг, который бы обеспечил «сущест
венное убывание» функции f Более того, на практике иногда довольст
вуются определением значения а" > О, которое просто обеспечивает
уменьшение значения целевой функции.
В одном из простейших алгоритмов (типа дробления шага) такого
выбора шага а11 фиксируют начальное значение а > О и значение пара-
метра у, О < у < 1. За а11 принимают а11 = а · у'п, где 111 - первый из
номеров 1 = О, 1, 2, "" для которого выполнено условие убывания
j(x<11> - ау 1g<п>)- J(x<11>) <О. (10.28)
Однако при таком выборе а" нет гарантии, что последовательность
х<11> будет сходиться к точке минимума даже для простой квадратичной
функции (10.24). Условие (10.28) является слишком слабым: последова
тельность х<11>, незначительно уменьшая значения функции /, может
«останавливаться», не доходя до точки х .Такое поведение последова-
328](https://image.slidesharecdn.com/33379-160302054853/85/33379-329-320.jpg)
![Глава 10. Методы многомерной минимизации
вается в малой окрестности точки минимума, где антиградиент,
задающий направление поиска, мал по модулю. Поэтому эффектив
ность градиентного метода на завершающей стадии поиска сущест
венно ниже, чем на начальной стадии.
§ 10.4. Метод Ньютона
1. Простейший вариант метода Ньютона и метод Ньютона
с дроблением шага. Пусть в некоторой окрестности точки минимума
х функция f является сильно выпуклой и дважды непрерывно диффе
ренцируемой. Далее, пусть x(n) - хорошее приближение к х . Тогда
в малой окрестности точки х<п> функция f достаточно точно аппрокси
мируется квадратичной функцией
1
Fn(x) = J(x<11>) +(g(n), х -х<п)) + 2(G(n)(x -х<п>), х -х<п>),
являющейся суммой первых трех членов ее разложения по формуле
Тейлора (ер. с формулой (10.9)). Здесьg<п) = f'(x<11>), G(п) = f"(x<n>).
Можно ожидать, что точка х<п>, в которой достигается минимум
функции Fn, будет значительно лучшим приближением к х, чем х<п).
Учитывая, что F~(x) = g<п> + G<11>(x - х<11>), замечаем, что точка х<п>
может быть определена из необходимого условия экстремума:
g<п> + G<п>(х<п> -х<">) =О.
Таким образом, чтобы попасть из точки х<п> в точку х<п>, нужно
переместиться вдоль векторар(п) = х<п> -х<п>, который определяется из
системы линейных алгебраических уравнений
G(n)p(n) = -g(n), (10.30)
Вектор р (п) принято называть ньютоновским направлением, а метод
спуска
(10.31)
с таким выбором p(n) - методом Ньютона.
Отметим, что ньютоновское направление является направлением
спуска. В самом деле, в силу равенства (10.30) для р<п) верна формула
p(n) = -[G<n)J-lg(n). Матрица [G<11 JJ-I положительно определена (это
следует из положительной определенности матрицы G(")). Поэтому
(f'(x<n>), р<">) = -([G<п>]-lg<п>, g<">) <О.
330](https://image.slidesharecdn.com/33379-160302054853/85/33379-331-320.jpg)
![Глава 10. Методы многомерной минимизации
Направление спуска в квазиньютоновских методах определяется как
решение системы уравнений
в<п)p(n) = -g<п>,
в которой В <11> - текущее приближение к матрице Гессе. Начальное
приближение в<0> обычно полагают равным единичной матрице. В
таком случае р<0> = -g<0> и первая итерация совпадает с одним шагом
градиентного метода.
После того, как найдено приближение х<п + 1>, вычисляют матрицу
в<п + IJ = в<п> + лв<11>, где лв<11> - некоторая поправочная матрица. Во
всех правилах пересчета неизменным является выполнение квазинью
тоновского условия
в<п + l)(х<п + 1) -x<n>) = g<n + 1) - g<п).
Известно, что при определенных условиях квазиньютоновские
методы сходятся сверхлинейно. Для квадратичных же функций они
дают точное значение точки минимума после конечного числа ите
раций, которое не превышает 1 т.
Первый из квазиньютоновских методов был предложен в 1959 г.
Дэвидоном. С тех пор эти методы непрерывно совершенствовались и
к настоящему времени стали одними из наиболее популярных и широко
применяемых на практике. Весьма интересное и содержательное обсуж
дение квазиньютоновских методов содержится в книгах [28, 40, 112].
Замечание. В некоторых вариантах квазиньютоновских мето
дов направление спуска вычисляется по формуле р<п> = -н<п>g<11>,
где Н(n) - матрица, аппроксимирующая матрицу, обратную мат
рице Гессе.
3. Метод Ньютона и квазиньютоновские методы при наличии
помех. Вычислительные ошибки (помехи) оказывают существенное
влияние на поведение метода Ньютона. Природа этих ошибок может
быть различной (вычисление g<11>, решение системы уравнений
G<11>p<11>= -g<п> и др.). В результате вместо ньютоновского направления
р<п> получается направление р~п), вычисленное с погрешностью Е =
= IP(n) - р~п) 1 . Как известно, метод Ньютона сходится, вообще говоря,
лишь в малой окрестности И точки минимума. В случае, когда радиус
этой окрестности меньше Е, очередное приближение х<п + I) =
1 Естественно, что это верно только при отсутствии вычислительной погрешности.
334](https://image.slidesharecdn.com/33379-160302054853/85/33379-335-320.jpg)

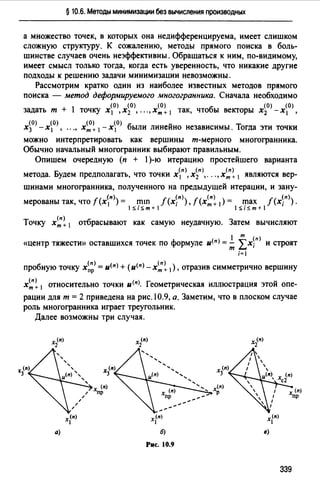
![Глава 10. Методы многомерной минимизации
Случай : f(xn» <.5,./(х~;)) <.5,./(х~». т.е. пробная точка не привела
к уменьшению значения целевой функции, но и не стала «худшей»
б (п) (п) (п) (п)
в на оре х1 , х2 , •.. , хт , xnp . В этом случае точку признают удовле-
- (п) (п)
творительнои и хт + 1 заменяют на xnp .
- (п) / (п)
Случаи 2: f(x"P) < (х 1 ) , т.е. выбор пробной точки привел
к уменьшению значения целевой функции. Тогда направление отра
жения считают удачным и делают попытку «растянуты> многогранник в
этом направлении с коэффициентом растяжения р > l (обычно 2 <.5,. р <.5,. 3).
Находят точку х~п) = и(п) + Р(и(п) -х~~ 1). Если f (x~n)) </(х~;)), то рас-
тяжение прошло удачно и точку х~~ 1 , заменяют на х~п). В противном
случае растяжение было неудачным и производят замену х~~ 1 на х~;).
На рис. 10.9, б показано «растяжение» с коэффициентом р = 2.
Случай 3: f(x~;»>f(x~». В этом случае считают, что много
гранник следует сжать. Если f (x~;)) >/ (х~~ 1), то вершину х~~ 1
заменяют точкой х(п) = и(п) -у(и(п) -х(п) ) Если же f(x(n)) </(х(п) )с 1 т + 1 • пр - т + 1 •
то х~~ 1 заменяют на х~:) = и(п) +у(и(п) - х~~ 1) . Здесь О < у < l, у -
коэффициент сжатия (обычно у = l/2). На рис. 10.9, в показано
«сжатие» с коэффициентом у = l/2.
Помимо операций отражения, сжатия и растяжения периодически
(после выполнения определенного числа итераций) производят опе
рацию замены текущего многогранника правильным многогранником -
так называемое восстановление. При восстановлении сохраняются
лишь две лучшие точки последнего многогранника. Расстояние между
этими точками принимают за длину ребра вновь генерируемого пра
вильного многогранника. Эта операция позволяет ликвидировать
излишние деформации, возникаюшие в ходе итераций.
Известно большое число различных модификаций этого метода.
Подробно они описаны в книгах [28, 112]. Там же указаны различные
критерии окончания.
2. Методы минимизации гладких функций, использующие
конечно-разностные аппроксимации производных. Довольно часто
в приложениях возникает необходимость в минимизации функций,
обладающих достаточным числом производных, которые тем не менее
340](https://image.slidesharecdn.com/33379-160302054853/85/33379-341-320.jpg)
![§ 10.7. Нелинейная задача метода наименьших квадратов
недоступны для прямого вычисления. Например. такая ситуация имеет
место тогда, когда значение функции является результатом решения
сложной математической задачи. В этом случае приходится применять
алгоритмы, использующие лишь вычисляемые в различных точках зна
чения функции f Здесь обращение к методам прямого поиска (типа
метода деформируемого многогранника), специально разработанным
для минимизации негладких функций, вряд ли целесообразно, так как
эти методы не позволяют извлекать никакой выгоды из возможной
гладкости функции. Часто существенно лучший результат можно
получить, заменив в одном из алгоритмов спуска используемые в нем
производные их аппроксимациями в соответствии с формулами чис
ленного дифференцирования (см. гл. 12). Например, для производной
r;. простейшая аппроксимация такова:
]
f;}x 1,x2, ...,xm)~k(f(x1, .•• ,Xj-l•xj+hj,Xj+I• ...,хт)-/(х1,х2, ...,хт)).
)
Подобная модификация алгоритмов не является тривиальной и
требует достаточной осторожности в реализации. Это связано с
высокой чувствительностью формул численного дифференцирования к
ошибкам в вычислении функции (см. § 12.3). Более подробное обсуж
дение методов минимизации, использующих конечно-разностное
аппроксимации производных, можно найти в [28] и [40]. В заключение
все же отметим, что конечно-разностные аппроксимации производных
используются в алгоритмах минимизации тогда, когда аналитическое
вычисление производных невозможно. Если же производные можно
вычислить аналитически, то усилия, потраченные на такое вычисление,
как правило, окупаются.
§ 1О.7. Неnинейна1 задача
метода наименьших квадратов
1. Нелинейная задача метода наименьших квадратов. Среди
задач безусловной минимизации особое место занимает задача миними
зации функций вида
(10.43)
гдеj(х) = (/i(x),h.(x), ...,fzv(x))Т, f;(x) (:;;; i:;;; N) - некоторые функции т
переменных х =(х1 , х2, .•., хт)Т. Как правило, N ~ т; часто N » т.
341](https://image.slidesharecdn.com/33379-160302054853/85/33379-342-320.jpg)

![Глава 10. Методы многомерной минимизации
где ak > О вычисляется как решение задачи одномерной минимизации
<pk(ak) = min <i>k (а), где <pk(a) =llлx<k» + ap(k+ 1>11;.
а~О
4. Другие методы. Коротко обсудим другие подходы к решению
нелинейной задачи метода наименьших квадратов.
Заметим, что искомое решение должно удовлетворять необходимому
условию экстремума F'(x) =О. В силу формулы (10.45) это условие при-
нимает вид
(10.47)
Применяя для решения этой системы нелинейных уравнений класси
ческий метод Ньютона, мы приходим к следующему итерационному
методу
dkJp<k + 1) =_[J<k>] r/(x(k)),
(k + 1) (k) + (k + 1)
х =х р .
(10.48)
(10.49)
Матрица G(k) = G(x<k>), которую следовало бы использовать в этом
методе, весьма громоздка и неудобна для вычислений. Согласно фор
муле (10.46) она имеет вид
N
G(k) = [J<kyJ(k) + Q(k)' где Q(k) = L f;(x(k1>G;(x(k)).
i=I
Дrlя вычисления слагаемоm (lk) на каждой итерации требуется
вычисление всех вторых частных производных всех функций f;, 1~ i ~ N.
Этого всячески стараются избегать.
Обратим внимание на то, что если получено достаточно хорошее
приближение x<k) такое, что llлx<k»ll2 "'О, тоf;(x<k))"' О для всех i = 1,
2, ..., N. В этом случае Q(k) "'О и dk)"' [J(k)]TJ(k).
Замена в итерационном методе (10.48), (10.49) матрицы G(k) на мат
рицу [J(k)]TJ(k) приводит к итерационному методу
[J(k)] тJ(k)p(k + 1) = _J (x<k>{лx<k>);
x<k + 1) = x<k> + p<k + IJ,
(10.50)
(10.51)
который эквивалентен методу
системы (10.50) совпадают
llлx<k>) + J(x<k>)Pll;.
Гаусса-Ньютона, так как решения
с точками минимума функции
Распространенной альтернативой методу Гаусса-Зейделя является
метод Левенберга-Маркардта. В этом методе матрица G(k) заменяется
344](https://image.slidesharecdn.com/33379-160302054853/85/33379-345-320.jpg)
![§ 10.8. Дополнительные замечания
матрицей [J(k>yjk> +а~, где О~ ak - параметр, и метод принимает
Вид
([J(k>]Tjk + a~)/k+ 1) = -[JЩ]Tf(x(k»,
х<* + t) = x<AJ + р<* + 1).
Методы Гаусса-Ньютона и Левенберга-Маркардта исходят из
того, что вблизи от решения невязка/(х<*>) мала и поэтому слагаемым
(i*> в формуле для вычисления G(k) можно пренебречь. Такие задачи
обычно называют задачами с малыми невязками.
Однако на практике часто встречаются задачи с большими невяз
ками, в которых это слагаемое существенно. В этом случае строят спе
циальные квазиньютоновские приближения м<*J к матрице (i*> и итера
ции проводят по формулам
([J(k))Тj*> + м<*>)р(k + 1) = - J(x(k>{f(x(k))'
х<* + 1) = х<*> + p<k + 1).
Достаточно подробное обсуждение квазиньютоновских методов и
других методов решения нелинейной задачи метода наименьших квад
ратов можно найти в книгах [28, 40].
§ 10.8. Дополнительные замечани1
1. Естественно, что в данной книге содержится лишь краткое введение
в методы решения задач безусловной минимизации. Более подробное изло
жение можно найти, например в [6, 20, 28, 40, 78, 80, 94, 112 и др.].
2. Задачи условной минимизации. Множество Х, на котором
минимизируется функция f, часто задается с помощью системы нера
венств вида
g;(x1, х2, "., хт) 2 О, i = 1, 2, "., k.
Если целевая функция f и задающие множество Х функции g,
линейны, то задачу минимизации называют задачей линейного про
граммирования. Если же хотя бы одна из этих функций нелинейна, то
говорят о задаче нелинейного программирования.
Обсуждение методов решения задач условной минимизации при
всей их важности выходит за рамки данной книги. Укажем, например
на книги [20, 28, 94, 112), содержащие достаточно подробное и доступное
введение в соответствующие методы.
3. Особый класс задач составляют так называемые задачи дис
кретной минимизации. В этих задачах множество Х, на котором миними-
345](https://image.slidesharecdn.com/33379-160302054853/85/33379-346-320.jpg)