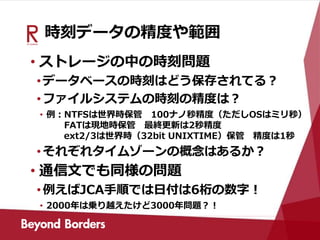
データベースの時間・時刻
Oracleの場合
型名
格納
サイズ(B)
説明 最遠の過去 最遠の未来精度
Date 7バイト
日付と時刻両方
(時間帯なし)
4713 BC 9999 AD 1秒
timestamp [ (p=0~9) ]
7~11
バイト
日付と時刻両方
(時間帯なし)
4713 BC 9999 AD
秒以下
p桁
timestamp [ (p=0~9) ]
with time zone
13バイト
日付と時刻両方、
時間帯付き
4713 BC
-14:00
9999 AD
+12:00
秒以下
p桁
timestamp [ (p=0~9) ]
with local time zone
7~11
バイト
日付と時刻両方
(時間帯なし)
4713 BC 9999 AD
秒以下
p桁
interval year [ (p=0~9) ]
to month
5バイト
年月の期間
(pは年の桁数)
0 999999999年 月
interval day [ (p=0~9) ]
to second [ (q=0~9) ]
11バイト
日秒の期間
(pは日の桁数)
0 999999999日
秒以下
q桁
https://docs.oracle.com/cd/E57425_01/121/SQLRF/sql_elements001.htm
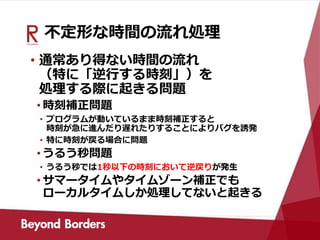
45.
PostgreSQLの場合
型名
格納
サイズ
説明 最遠の過去 最遠の未来精度
timestamp [ (p) ]
[ without time zone ]
8 バイト
日付と時刻両方
(時間帯なし)
4713 BC 294276 AD
1μ秒、
14桁
timestamp [ (p) ]
with time zone
8バイト
日付と時刻両方、
時間帯付き
4713 BC 294276 AD
1μ秒、
14桁
date 4バイト 日付(時刻なし) 4713 BC 5874897 AD 1日
time [ (p) ]
[ without time zone ]
8バイト 時刻(日付なし) 00:00:00 24:00:00
1μ秒、
14桁
time [ (p) ]
with time zone
12バイト
その日の時刻のみ、
時間帯付き
00:00:00+1459 24:00:00-1459
1μ秒、
14桁
interval [ fields ] [ (p) ] 16バイト 時間間隔 -178000000年 178000000年
1μ秒、
14桁
https://www.postgresql.jp/document/9.4/html/datatype-datetime.html
46.
MySQLの場合(5.6.4以降)
型名
格納
サイズ
説明 最遠の過去 最遠の未来精度
date 3バイト 日付(時刻なし) 1000 AD 9999 AD 1日
datetime [ (p=0~6) ] 5~8 日付時刻 1000 AD 9999 AD
秒以下
p桁
timestamp [ (p=0~6) ] 4~7 日付時刻 1970 AD
2038-01-19
03:14:07.99…
秒以下
p桁
time [ (p) ] 3~6 時刻(日付なし) -838:59:59
838:59:59
.999999
秒以下
p桁
year 1バイト 年 1901 AD 2155 AD 1年
https://dev.mysql.com/doc/refman/5.6/ja/date-and-time-types.html





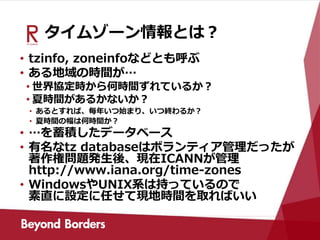
![データベースの時間・時刻
Oracleの場合
型名
格納
サイズ(B)
説明 最遠の過去 最遠の未来 精度
Date 7バイト
日付と時刻両方
(時間帯なし)
4713 BC 9999 AD 1秒
timestamp [ (p=0~9) ]
7~11
バイト
日付と時刻両方
(時間帯なし)
4713 BC 9999 AD
秒以下
p桁
timestamp [ (p=0~9) ]
with time zone
13バイト
日付と時刻両方、
時間帯付き
4713 BC
-14:00
9999 AD
+12:00
秒以下
p桁
timestamp [ (p=0~9) ]
with local time zone
7~11
バイト
日付と時刻両方
(時間帯なし)
4713 BC 9999 AD
秒以下
p桁
interval year [ (p=0~9) ]
to month
5バイト
年月の期間
(pは年の桁数)
0 999999999年 月
interval day [ (p=0~9) ]
to second [ (q=0~9) ]
11バイト
日秒の期間
(pは日の桁数)
0 999999999日
秒以下
q桁
https://docs.oracle.com/cd/E57425_01/121/SQLRF/sql_elements001.htm](https://image.slidesharecdn.com/20181030dbsc-symposium-181030045809/85/20181030-DBSC-44-320.jpg)
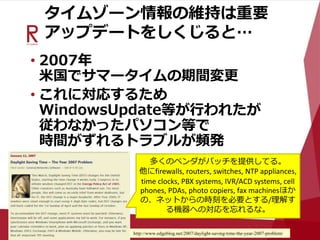
![PostgreSQLの場合
型名
格納
サイズ
説明 最遠の過去 最遠の未来 精度
timestamp [ (p) ]
[ without time zone ]
8 バイト
日付と時刻両方
(時間帯なし)
4713 BC 294276 AD
1μ秒、
14桁
timestamp [ (p) ]
with time zone
8バイト
日付と時刻両方、
時間帯付き
4713 BC 294276 AD
1μ秒、
14桁
date 4バイト 日付(時刻なし) 4713 BC 5874897 AD 1日
time [ (p) ]
[ without time zone ]
8バイト 時刻(日付なし) 00:00:00 24:00:00
1μ秒、
14桁
time [ (p) ]
with time zone
12バイト
その日の時刻のみ、
時間帯付き
00:00:00+1459 24:00:00-1459
1μ秒、
14桁
interval [ fields ] [ (p) ] 16バイト 時間間隔 -178000000年 178000000年
1μ秒、
14桁
https://www.postgresql.jp/document/9.4/html/datatype-datetime.html](https://image.slidesharecdn.com/20181030dbsc-symposium-181030045809/85/20181030-DBSC-45-320.jpg)
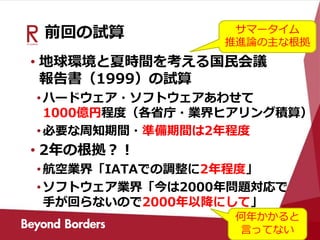
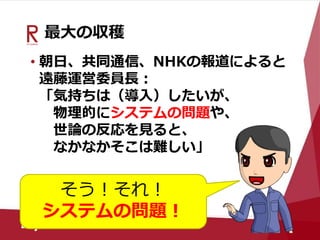
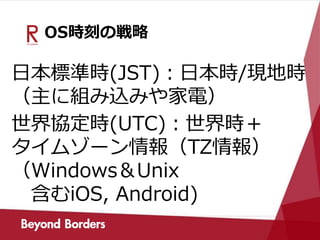
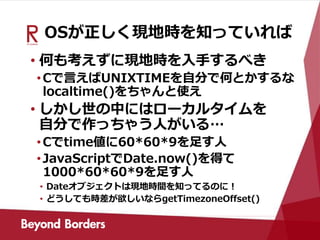
![MySQLの場合(5.6.4以降)
型名
格納
サイズ
説明 最遠の過去 最遠の未来 精度
date 3バイト 日付(時刻なし) 1000 AD 9999 AD 1日
datetime [ (p=0~6) ] 5~8 日付時刻 1000 AD 9999 AD
秒以下
p桁
timestamp [ (p=0~6) ] 4~7 日付時刻 1970 AD
2038-01-19
03:14:07.99…
秒以下
p桁
time [ (p) ] 3~6 時刻(日付なし) -838:59:59
838:59:59
.999999
秒以下
p桁
year 1バイト 年 1901 AD 2155 AD 1年
https://dev.mysql.com/doc/refman/5.6/ja/date-and-time-types.html](https://image.slidesharecdn.com/20181030dbsc-symposium-181030045809/85/20181030-DBSC-46-320.jpg)