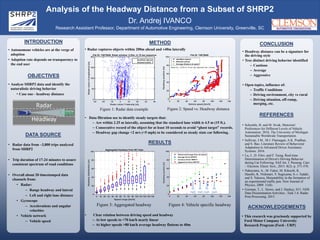
The document analyzes radar data from the SHRP2 program to study naturalistic driving behavior related to headway distance. The radar can capture objects within 200m ahead and 40m laterally. Data filtration is used to identify steady targets based on their location, duration of records, and headway gap changes. The results show that at low speeds under 70 km/h, headway distance increases nearly linearly with speed, while at higher speeds over 80 km/h the average headway flattens to around 40m. Three distinct driving styles - cautious, average, and aggressive - are identified based on differences in individual headway distances.