Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Asuka Nakajima
PDF, PPTX
23,050 views
2014年10月江戸前セキュリティ勉強会資料 -セキュリティ技術者になるには-
2014年10月に江戸前セキュリティ勉強会で発表させていただいた資料。テーマは「セキュリティ技術者になるには」です。
Technology
◦
Read more
82
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 39
2
/ 39
3
/ 39
4
/ 39
5
/ 39
6
/ 39
7
/ 39
8
/ 39
9
/ 39
10
/ 39
11
/ 39
12
/ 39
13
/ 39
14
/ 39
15
/ 39
16
/ 39
17
/ 39
18
/ 39
19
/ 39
20
/ 39
21
/ 39
22
/ 39
23
/ 39
24
/ 39
25
/ 39
26
/ 39
27
/ 39
28
/ 39
29
/ 39
30
/ 39
31
/ 39
32
/ 39
33
/ 39
34
/ 39
35
/ 39
36
/ 39
37
/ 39
38
/ 39
39
/ 39
More Related Content
PDF
TCAMのしくみ
by
ogatay
PDF
Paxos
by
Preferred Networks
PDF
DPDKによる高速コンテナネットワーキング
by
Tomoya Hibi
PPTX
BuildKitによる高速でセキュアなイメージビルド
by
Akihiro Suda
PDF
200,000 Req/sec をさばく広告入札システムを支えるパフォーマンスチューニング術 #jjug_ccc #ccc_g6
by
Hironobu Isoda
PPTX
Dockerと外部ルータを連携させる仕組みを作ってみた
by
npsg
PDF
わかる!metadata.managedFields / Kubernetes Meetup Tokyo 48
by
Preferred Networks
PDF
HTTP/2 入門
by
Yahoo!デベロッパーネットワーク
TCAMのしくみ
by
ogatay
Paxos
by
Preferred Networks
DPDKによる高速コンテナネットワーキング
by
Tomoya Hibi
BuildKitによる高速でセキュアなイメージビルド
by
Akihiro Suda
200,000 Req/sec をさばく広告入札システムを支えるパフォーマンスチューニング術 #jjug_ccc #ccc_g6
by
Hironobu Isoda
Dockerと外部ルータを連携させる仕組みを作ってみた
by
npsg
わかる!metadata.managedFields / Kubernetes Meetup Tokyo 48
by
Preferred Networks
HTTP/2 入門
by
Yahoo!デベロッパーネットワーク
What's hot
PDF
BuildKitの概要と最近の機能
by
Kohei Tokunaga
PDF
Apache Kafkaって本当に大丈夫?~故障検証のオーバービューと興味深い挙動の紹介~
by
NTT DATA OSS Professional Services
PDF
バージョン17からのpg_stat_bgwriter (第48回 PostgreSQLアンカンファレンス 発表資料)
by
NTT DATA Technology & Innovation
PDF
コンテナ時代のOpenStack
by
Akira Yoshiyama
PPTX
コンテナネットワーキング(CNI)最前線
by
Motonori Shindo
PDF
ネットワークエンジニアはどこでウデマエをみがくのか?
by
Yuya Rin
PDF
分散ストレージソフトウェアCeph・アーキテクチャー概要
by
Etsuji Nakai
PDF
NetflixにおけるPresto/Spark活用事例
by
Amazon Web Services Japan
PPTX
VPP事始め
by
npsg
PDF
PGOを用いたPostgreSQL on Kubernetes入門(PostgreSQL Conference Japan 2022 発表資料)
by
NTT DATA Technology & Innovation
PDF
CTF for ビギナーズ ネットワーク講習資料
by
SECCON Beginners
PDF
Red shadows ringing in Japan's Cyberspace
by
sttyk
PDF
明日から始める! ソフトウェアのグリーン化(GSF MeetUp Tokyo 発表資料)
by
NTT DATA Technology & Innovation
PDF
Grafana LokiではじめるKubernetesロギングハンズオン(NTT Tech Conference #4 ハンズオン資料)
by
NTT DATA Technology & Innovation
PDF
SQL大量発行処理をいかにして高速化するか
by
Shogo Wakayama
PDF
PG-REXで学ぶPacemaker運用の実例
by
kazuhcurry
PPTX
CloudNativePGを動かしてみた! ~PostgreSQL on Kubernetes~(第34回PostgreSQLアンカンファレンス@オンライ...
by
NTT DATA Technology & Innovation
PDF
ヤフー発のメッセージキュー「Pulsar」のご紹介
by
Yahoo!デベロッパーネットワーク
PDF
Apache Igniteインメモリーデータ処理プラットフォーム:特徴&利活用
by
Yahoo!デベロッパーネットワーク
PPTX
PostgreSQL 12は ここがスゴイ! ~性能改善やpluggable storage engineなどの新機能を徹底解説~ (NTTデータ テクノ...
by
NTT DATA Technology & Innovation
BuildKitの概要と最近の機能
by
Kohei Tokunaga
Apache Kafkaって本当に大丈夫?~故障検証のオーバービューと興味深い挙動の紹介~
by
NTT DATA OSS Professional Services
バージョン17からのpg_stat_bgwriter (第48回 PostgreSQLアンカンファレンス 発表資料)
by
NTT DATA Technology & Innovation
コンテナ時代のOpenStack
by
Akira Yoshiyama
コンテナネットワーキング(CNI)最前線
by
Motonori Shindo
ネットワークエンジニアはどこでウデマエをみがくのか?
by
Yuya Rin
分散ストレージソフトウェアCeph・アーキテクチャー概要
by
Etsuji Nakai
NetflixにおけるPresto/Spark活用事例
by
Amazon Web Services Japan
VPP事始め
by
npsg
PGOを用いたPostgreSQL on Kubernetes入門(PostgreSQL Conference Japan 2022 発表資料)
by
NTT DATA Technology & Innovation
CTF for ビギナーズ ネットワーク講習資料
by
SECCON Beginners
Red shadows ringing in Japan's Cyberspace
by
sttyk
明日から始める! ソフトウェアのグリーン化(GSF MeetUp Tokyo 発表資料)
by
NTT DATA Technology & Innovation
Grafana LokiではじめるKubernetesロギングハンズオン(NTT Tech Conference #4 ハンズオン資料)
by
NTT DATA Technology & Innovation
SQL大量発行処理をいかにして高速化するか
by
Shogo Wakayama
PG-REXで学ぶPacemaker運用の実例
by
kazuhcurry
CloudNativePGを動かしてみた! ~PostgreSQL on Kubernetes~(第34回PostgreSQLアンカンファレンス@オンライ...
by
NTT DATA Technology & Innovation
ヤフー発のメッセージキュー「Pulsar」のご紹介
by
Yahoo!デベロッパーネットワーク
Apache Igniteインメモリーデータ処理プラットフォーム:特徴&利活用
by
Yahoo!デベロッパーネットワーク
PostgreSQL 12は ここがスゴイ! ~性能改善やpluggable storage engineなどの新機能を徹底解説~ (NTTデータ テクノ...
by
NTT DATA Technology & Innovation
Similar to 2014年10月江戸前セキュリティ勉強会資料 -セキュリティ技術者になるには-
PDF
Windowsセキュリティ
by
Tatsuya Ueda
PPTX
4 Enemies of DevSecOps 2016
by
Riotaro OKADA
PPT
SEから見た情報セキュリティの課題
by
Katsuhide Hirai
PDF
Itパスポート勉強会for vb aer_ネットアップ版_20210731
by
Ryu CyberWintelligent
PPT
資料
by
Tatsuya Ueda
PPTX
春の脆弱性祭り 2017/06/13
by
dcubeio
PPTX
Security measures
by
shusuke-ichikawa
PPT
セキュアプログラミング講座
by
minoru-ito
PDF
徳丸本ができるまで
by
Hiroshi Tokumaru
PDF
セキュアな育毛
by
Ishibashi Ryosuke
PPTX
セキュリティ入門 ( 情報保護編 )
by
y-hattori
PDF
Sec gene pre_feb,2017
by
Takeo Sakaguchi ,CISSP,CISA
PDF
経営者・マネージャーが知るべき情報セキュリティ
by
Yasuo Ohgaki
PPTX
Browser andsecurity2015
by
彰 村地
PDF
Sec gene pre_jun,2017
by
Takeo Sakaguchi ,CISSP,CISA
ODP
第8回脆弱性診断入門
by
ionis111
PPTX
なぜ私たちはシステムを侵害から守れないのか?~広く知って欲しい不都合なこと~
by
Tomohiro Nakashima
PPTX
6 1security3
by
Yuki Fujino Oita Univ.
PDF
Sec012 windows 10_があなたの情報
by
Tech Summit 2016
PPTX
セキュリティを学ぼう~Ctfを添えて~
by
Takumi Ishibashi
Windowsセキュリティ
by
Tatsuya Ueda
4 Enemies of DevSecOps 2016
by
Riotaro OKADA
SEから見た情報セキュリティの課題
by
Katsuhide Hirai
Itパスポート勉強会for vb aer_ネットアップ版_20210731
by
Ryu CyberWintelligent
資料
by
Tatsuya Ueda
春の脆弱性祭り 2017/06/13
by
dcubeio
Security measures
by
shusuke-ichikawa
セキュアプログラミング講座
by
minoru-ito
徳丸本ができるまで
by
Hiroshi Tokumaru
セキュアな育毛
by
Ishibashi Ryosuke
セキュリティ入門 ( 情報保護編 )
by
y-hattori
Sec gene pre_feb,2017
by
Takeo Sakaguchi ,CISSP,CISA
経営者・マネージャーが知るべき情報セキュリティ
by
Yasuo Ohgaki
Browser andsecurity2015
by
彰 村地
Sec gene pre_jun,2017
by
Takeo Sakaguchi ,CISSP,CISA
第8回脆弱性診断入門
by
ionis111
なぜ私たちはシステムを侵害から守れないのか?~広く知って欲しい不都合なこと~
by
Tomohiro Nakashima
6 1security3
by
Yuki Fujino Oita Univ.
Sec012 windows 10_があなたの情報
by
Tech Summit 2016
セキュリティを学ぼう~Ctfを添えて~
by
Takumi Ishibashi
More from Asuka Nakajima
PDF
Reverse Engineering Dojo: Enhancing Assembly Reading Skills
by
Asuka Nakajima
PDF
[Dagstuhl Seminar 17281] Similarity Calculation Method for Binary Executables
by
Asuka Nakajima
PDF
技術紹介: S2E: Selective Symbolic Execution Engine
by
Asuka Nakajima
PDF
[JPCERT/CC POC Meeting] 研究紹介 + DLLハイジャックの脆弱性
by
Asuka Nakajima
PDF
第二回CTF勉強会資料
by
Asuka Nakajima
PDF
[CSS×2.0 2014] Polyglotシェルコードの最高記録に挑戦しよう☆
by
Asuka Nakajima
PDF
[セキュリティ・キャンプフォーラム 2014] 卒業生プレゼンテーション 『私とセキュリティと過去と未来』
by
Asuka Nakajima
PDF
[ROOTCON13] Pilot Study on Semi-Automated Patch Diffing by Applying Machine-L...
by
Asuka Nakajima
PDF
[AsiaCCS2019] A Pilot Study on Consumer IoT Device Vulnerability Disclosure a...
by
Asuka Nakajima
Reverse Engineering Dojo: Enhancing Assembly Reading Skills
by
Asuka Nakajima
[Dagstuhl Seminar 17281] Similarity Calculation Method for Binary Executables
by
Asuka Nakajima
技術紹介: S2E: Selective Symbolic Execution Engine
by
Asuka Nakajima
[JPCERT/CC POC Meeting] 研究紹介 + DLLハイジャックの脆弱性
by
Asuka Nakajima
第二回CTF勉強会資料
by
Asuka Nakajima
[CSS×2.0 2014] Polyglotシェルコードの最高記録に挑戦しよう☆
by
Asuka Nakajima
[セキュリティ・キャンプフォーラム 2014] 卒業生プレゼンテーション 『私とセキュリティと過去と未来』
by
Asuka Nakajima
[ROOTCON13] Pilot Study on Semi-Automated Patch Diffing by Applying Machine-L...
by
Asuka Nakajima
[AsiaCCS2019] A Pilot Study on Consumer IoT Device Vulnerability Disclosure a...
by
Asuka Nakajima
Recently uploaded
PDF
PMBOK 7th Edition Project Management Process Scrum
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PDF
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
PDF
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
PDF
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PMBOK 7th Edition Project Management Process Scrum
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
2014年10月江戸前セキュリティ勉強会資料 -セキュリティ技術者になるには-
2.
板前のご紹介 中 島 明 日 香 ‣高校生時代にセキュリティに出会う ‣NTTセキュアプラットフォーム研究所 ‣SECCON実行委員/CTF for GIRLS ‣セキュリティコンテストに関わる CTF/Hardening/MWS
Cup/IWSEC Cup ソフトウェアの脆弱性について研究 ‣キャンプ卒業生/チューター バイナリ解析クラス卒2009/ソフトウェアセキュリティ2014 小説「Project SEVEN」を読んで
3.
本日のネタ
15.
IT技術の基礎知識・技能 この分野の 知識・技能 セキュリティ 技術・知識 セキュリティ関係の基礎知識・情報 先端的知識 セキュリティ技術者の知識体系(概要図) 例 ソフトウェア WEB
ネットワーク分野 基礎 応用
16.
基礎的な知識・技能を習得する ■基礎知識・技能習得の教材等 ‣資格:I Tパスポート/基本情報技術者 ‣書籍: 絵本シリーズ
[アンク社](例:パソコンの仕組みの絵本) ‣オンライン学習サイト: ドットインストール/CodeAcademy ‣学校:大学の授業(例:情報基礎・コンピューター基礎) ‣その他: Linux/PC自作/管理者になる 基礎的な知識・技能を学ぶ教材・サイトは充実
17.
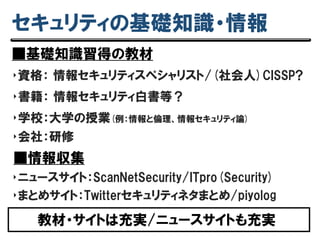
セキュリティの基礎知識・情報 ■基礎知識習得の教材 ‣資格: 情報セキュリティスペシャリスト/(社会人)CISSP? ‣書籍: 情報セキュリティ白書等? ‣学校:大学の授業(例:情報と倫理、情報セキュリティ論) 教材・サイトは充実/ニュースサイトも充実 ‣会社:研修 ■情報収集 ‣ニュースサイト:ScanNetSecurity/ITpro(Security) ‣まとめサイト:Twitterセキュリティネタまとめ/piyolog
18.
余談1:人の学び方・モチベーションについて 参考資料 http://learningpatterns.sfc.keio.ac.jp/ラーニングパターン 上達の法則 –効率のよい努力を科学する-【書籍】 学び方 インプット ‣書籍を読む ‣勉強会に参加 アウトプット ‣勉強会で発表/書籍執筆 ‣Webサイト/ブログ/Github 動機 内発的動機 ‣脆弱性の仕組みが気になる ‣バイナリ眺めてるのが楽しい 外発的動機 ‣CTFで優勝したい ‣賞金が欲しい
19.
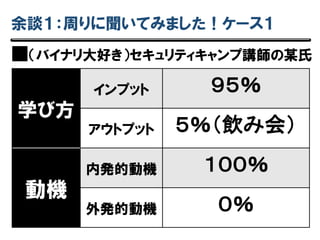
余談1:周りに聞いてみました!ケース1 学び方 インプット 95% アウトプット 5%(飲み会) 動機 内発的動機
100% 外発的動機 0% ■(バイナリ大好き)セキュリティキャンプ講師の某氏
20.
余談1:周りに聞いてみました!ケース2 学び方 インプット 65% アウトプット 35% 動機 内発的動機
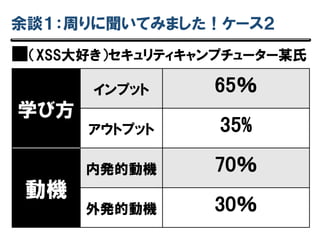
70% 外発的動機 30% ■(XSS大好き)セキュリティキャンプチューター某氏
21.
特定分野の知識・技能 ■どうするか? ‣必要な知識体系とは何なのか? ‣技能習得の手法とは? ‣知識習得の資料や教材は?(良書は?) ‣最近ではまとめ的なサイトがかなり充実してきてる (例)新人ネットワークエンジニアが読むべき本6冊~ ‣基本的には上級者の人に聞くのが一番早い ‣研究室の先輩/勉強会で詳しそうな人/人のブログ/大学の授業 (IT勉強会カレンダー) ■この段階での疑問点
22.
特定分野の知識・技能 [ソフトウェア] ■知識体系(例) ‣アセンブラの知識(x86,x86-64,ARM) ‣プログラミング力/開発経験 ■技能・経験 ‣コンパイラの知識(gcc,vc,最適化) ‣実行ファイルの知識(PE, ELF) ‣IDA/デバッガ(Ollydbg)の使い方 ‣リンカ・ローダの知識 ‣OS・CPU・メモリの知識
23.
特定分野の知識・技能 [ソフトウェア] ■書籍 (例) ‣はじめて読む486 ‣The
IDA pro Book (第二版) ‣リバースエンジニアリングバイブル ~コード再創造の美学~ ‣たのしいバイナリの歩き方 ‣Linkers&Loaders ‣インサイドWindows ‣各種プログラミング書 ‣デバッガ等自作/ゲームのチー(ry/CTF/Crackme ■勉強方法(例) ‣Reverse engineering for Beginners(無料電子書籍)
24.
特定分野のセキュリティ技術・知識の習得 ‣中々文献が無い(あったとしても海外の文献) ■どうするか? ■この段階での問題点 ‣トレーニングの受講/SANS/Blackhat/セキュリティ会社 ‣知っている人が限られてくる ‣習得も難しくなる ‣尖った人材育成の場/キャンプ/SECCON ‣[先端をいく人]が開催する勉強会に参加(Slideshare) ‣英語で検索しまくってみる/CTFのWriteupを検索[英語] ‣分野に関連した博士論文?(背景・関連技術の章)
25.
特定分野のセキュリティ技術・知識の習得 知識体系(例) 技能・経験(例) ‣BufferOverFlow/Use-after-free/FormatStringsBug ‣ASLR/DEP/StackCanary/SEHOP ‣Fuzzing ‣ExploitWriting ‣パッカー/難読化/解析妨害 ‣セキュアコーディング ‣Shellcode Writing(ret2libc/ROP)
26.
特定分野のセキュリティ技術・知識の習得 書籍(例) その他(例) ‣HACKING 美しき策謀 第二版 ‣ハッカープログラミング大全
攻撃編 ‣アナライジングマルウェア(宣伝?w) ‣The Shellcoder’s Handbook(私は読んでないが・・) https://www.corelan.be/index.php/articles/ http://opensecuritytraining.info/Training.html ‣The Corelan Team ‣OpenSecurityTraining http://inaz2.hatenablog.com/ ‣ももいろテクノロジー
27.
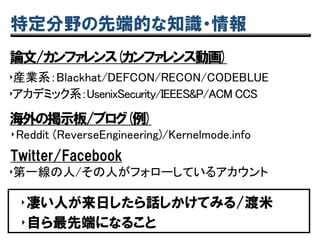
特定分野の先端的な知識・情報 論文/カンファレンス(カンファレンス動画) ‣産業系:Blackhat/DEFCON/RECON/CODEBLUE ‣Reddit (ReverseEngineering)/Kernelmode.info ‣凄い人が来日したら話しかけてみる/渡米 ‣自ら最先端になること ‣アカデミック系:UsenixSecurity/IEEES&P/ACM CCS 海外の掲示板/ブログ(例) Twitter/Facebook ‣第一線の人/その人がフォローしているアカウント
28.
特定分野の先端的な知識・情報 先端的な情報・知識(例) ‣Intel PIN ‣シンボリック実行/コンコリック実行(脆弱性に) ‣テイント解析 ‣JOP/SROPとか ‣Automatic Exploit
Generation
30.
学生時代 学校/研究室編 http://researchmap.jp/jopbd3chs-16769/ ‣「情報セキュリティ関連の大学研究室Webサイトをまとめてみた」 情報セキュリティ専門 情報セキュリティ人材育成コース(大学院) ‣ SecCap
(JAIST/NAIST/慶應大/IISEC/東北大) ‣ ISSスクエア(東大/中央大/IISEC) ‣情報セキュリティ大学院大学(IISEC) 大学の情報セキュリティ系研究室 最近は専門学校でも、セキュリティ学科が・・・ 自分の時は大学の先輩に聞いて武田研究室に出会った 海外 ‣カーネギーメロン大学等
31.
学生時代 活動編 (勉強と経験を兼ねて) 支援制度/スポンサー付活動/短期プロジェクト インターンシップ ‣すごうで(EpsilonDelta)
/Tachikoma ‣未踏プロジェクト/サイボウズ・ラボユース/GSoC ‣日本MS セキュリティレスポンスセンター 2ヶ月 (自分) ‣JPCERT/CC 解析センター 2ヶ月 (自分) ‣JNSAインターンシップ/海外インターンショップ(例:Facebook) ‣[弊社]「マルウェアの通信先の悪性判定に関する調査」 アルバイト ‣人づてで?(知り合い) ‣ソフトウェアテスト/ネットワークエンジニア補助(自分)
32.
セキュリティ技術者になる/選択肢の話 ‣外的キャリア ‣内的キャリア なぜ働くのか、何のために働くのか、なぜ その仕事をしたいのかなど、仕事や働き方に 対する個人の主観的な評価や認識 具体的な職種・職位・技能・実績など 客観的に把握できる職業上の経歴
33.
内的キャリア:基本的には自分がどう生きたいか →自分の管理が若干甘い(会社勤めなどある程度の束縛が欲しい) →裁量が多いと嬉しい/定型的な業務のみだとキツイ →キーワード:マルウェア、脆弱性、インシデントレスポンス →給料/残業等は気にしない →コミュニティに関わっていけるか(CTF,キャンプ) →その他、個人的な事情・願望・自分の性格の都合 →周囲に凄いセキュリティ技術者がいるか否か →技術的な所に関わっていきたい(専門家になれるか) →自分の個人名で成果が出せる所 or 大勢の人に貢献できること 生き方が分からないと、どんな職に就けば良いのかも分からない 個人的な例
34.
就職編:就活 ‣セキュリティ業種以外[PG/NW] ‣セキュリティベンダー [AVソフトとか] ‣IT企業のセキュリティ部門 海外 ‣セキュリティサービス/コンサルティング ‣高いセキュリティが求められる会社? ‣某アンチウィルスソフト会社に応募→面接 (自分) ‣海外就職用相談窓口も無く、履歴書作成すら大変 ‣独立行政法人/警察とか?
35.
就職編:起業 ‣FFRI ‣ネットエージェント ‣HASHコンサルティング ‣ゲヒルン ‣TRICORDER ‣何処かでキャリアを積んでから ‣キャンプ卒業生が起業した例も
36.
就職編:自宅セキュリティ技術者 バグハンター 脆弱性報奨金制度の充実化により可能 https://bugcrowd.com/list-of-bug-bounty-programs ■ The Bug
Bounty List ‣[日本]サイボウズ/mixi(過去) ‣[海外]Google/Microsoftとか これから? クラウドソーシング? →(どこか忘れたが)脆弱性診断の仕事を募集している人が →脆弱性報告の報奨金だけで年間600万以上稼いだ方も
37.
(おまけ)アンダーグラウンドな世界 ‣ボットネットのハーダー ‣ゼロデイの売買 ‣スパム業者 ‣マルウェア/ExploitKitの製作者 ‣「なにしてますか?忙しいですか?」中の人w ※ 冗談なので良い子はマネしないでください
38.
(最後に)個人的な心がけ ‣迷ったら難しいほうを選択する ‣出来るか出来ないかではなく、やるか やらないか(とりあえず飛び込んで見る) ‣自分のやりたい事を公言しておく ‣口だけ、行動だけにならないように 最近の例:CTF for GIRLS
39.
ご来店ありがとうごいました
Download










‣オンライン学習サイト: ドットインストール/CodeAcademy
‣学校:大学の授業(例:情報基礎・コンピューター基礎)
‣その他: Linux/PC自作/管理者になる
基礎的な知識・技能を学ぶ教材・サイトは充実](https://image.slidesharecdn.com/10-150604015942-lva1-app6892/85/2014-10-16-320.jpg)


![特定分野の知識・技能 [ソフトウェア]
■知識体系(例)
‣アセンブラの知識(x86,x86-64,ARM)
‣プログラミング力/開発経験
■技能・経験
‣コンパイラの知識(gcc,vc,最適化)
‣実行ファイルの知識(PE, ELF)
‣IDA/デバッガ(Ollydbg)の使い方
‣リンカ・ローダの知識
‣OS・CPU・メモリの知識](https://image.slidesharecdn.com/10-150604015942-lva1-app6892/85/2014-10-22-320.jpg)
![特定分野の知識・技能 [ソフトウェア]
■書籍 (例)
‣はじめて読む486
‣The IDA pro Book (第二版)
‣リバースエンジニアリングバイブル ~コード再創造の美学~
‣たのしいバイナリの歩き方
‣Linkers&Loaders
‣インサイドWindows
‣各種プログラミング書
‣デバッガ等自作/ゲームのチー(ry/CTF/Crackme
■勉強方法(例)
‣Reverse engineering for Beginners(無料電子書籍)](https://image.slidesharecdn.com/10-150604015942-lva1-app6892/85/2014-10-23-320.jpg)
![特定分野のセキュリティ技術・知識の習得
‣中々文献が無い(あったとしても海外の文献)
■どうするか?
■この段階での問題点
‣トレーニングの受講/SANS/Blackhat/セキュリティ会社
‣知っている人が限られてくる
‣習得も難しくなる
‣尖った人材育成の場/キャンプ/SECCON
‣[先端をいく人]が開催する勉強会に参加(Slideshare)
‣英語で検索しまくってみる/CTFのWriteupを検索[英語]
‣分野に関連した博士論文?(背景・関連技術の章)](https://image.slidesharecdn.com/10-150604015942-lva1-app6892/85/2014-10-24-320.jpg)





![学生時代 活動編 (勉強と経験を兼ねて)
支援制度/スポンサー付活動/短期プロジェクト
インターンシップ
‣すごうで(EpsilonDelta) /Tachikoma
‣未踏プロジェクト/サイボウズ・ラボユース/GSoC
‣日本MS セキュリティレスポンスセンター 2ヶ月 (自分)
‣JPCERT/CC 解析センター 2ヶ月 (自分)
‣JNSAインターンシップ/海外インターンショップ(例:Facebook)
‣[弊社]「マルウェアの通信先の悪性判定に関する調査」
アルバイト
‣人づてで?(知り合い)
‣ソフトウェアテスト/ネットワークエンジニア補助(自分)](https://image.slidesharecdn.com/10-150604015942-lva1-app6892/85/2014-10-31-320.jpg)


![就職編:就活
‣セキュリティ業種以外[PG/NW]
‣セキュリティベンダー [AVソフトとか]
‣IT企業のセキュリティ部門
海外
‣セキュリティサービス/コンサルティング
‣高いセキュリティが求められる会社?
‣某アンチウィルスソフト会社に応募→面接 (自分)
‣海外就職用相談窓口も無く、履歴書作成すら大変
‣独立行政法人/警察とか?](https://image.slidesharecdn.com/10-150604015942-lva1-app6892/85/2014-10-34-320.jpg)

![就職編:自宅セキュリティ技術者
バグハンター
脆弱性報奨金制度の充実化により可能
https://bugcrowd.com/list-of-bug-bounty-programs
■ The Bug Bounty List
‣[日本]サイボウズ/mixi(過去)
‣[海外]Google/Microsoftとか
これから?
クラウドソーシング?
→(どこか忘れたが)脆弱性診断の仕事を募集している人が
→脆弱性報告の報奨金だけで年間600万以上稼いだ方も](https://image.slidesharecdn.com/10-150604015942-lva1-app6892/85/2014-10-36-320.jpg)




















































![[Dagstuhl Seminar 17281] Similarity Calculation Method for Binary Executables](https://cdn.slidesharecdn.com/ss_thumbnails/dagstuhlseminar17281-200531030542-thumbnail.jpg?width=640&height=640&fit=bounds)

![[JPCERT/CC POC Meeting] 研究紹介 + DLLハイジャックの脆弱性](https://cdn.slidesharecdn.com/ss_thumbnails/jpcertccpocmeeting2018-1-200529161128-thumbnail.jpg?width=640&height=640&fit=bounds)

![[CSS×2.0 2014] Polyglotシェルコードの最高記録に挑戦しよう☆](https://cdn.slidesharecdn.com/ss_thumbnails/css2-200529154235-thumbnail.jpg?width=640&height=640&fit=bounds)
![[セキュリティ・キャンプフォーラム 2014] 卒業生プレゼンテーション 『私とセキュリティと過去と未来』](https://cdn.slidesharecdn.com/ss_thumbnails/securitycamp-200529153133-thumbnail.jpg?width=640&height=640&fit=bounds)
![[ROOTCON13] Pilot Study on Semi-Automated Patch Diffing by Applying Machine-L...](https://cdn.slidesharecdn.com/ss_thumbnails/rootcon-200517103713-thumbnail.jpg?width=640&height=640&fit=bounds)
![[AsiaCCS2019] A Pilot Study on Consumer IoT Device Vulnerability Disclosure a...](https://cdn.slidesharecdn.com/ss_thumbnails/asiaccsslide20190710-200517102305-thumbnail.jpg?width=640&height=640&fit=bounds)












