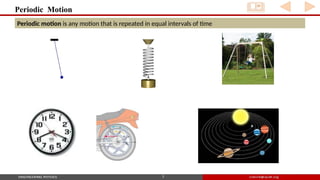
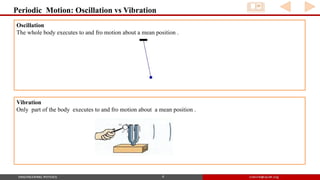
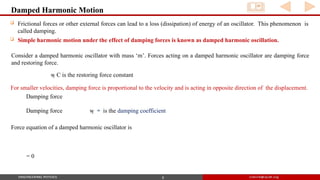
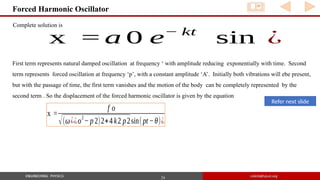
The document covers the fundamentals of oscillations in engineering physics, including types of harmonic motion such as simple harmonic motion and damped harmonic motion. It further explores different cases of damping (over damped, critically damped, and under damped), their equations, and the concept of forced harmonic oscillators and resonance. Key ideas include the effects of damping on amplitude and frequency, as well as the quality factor which measures oscillation sharpness and damping levels.

![Damped Harmonic Motion
11
x= A1e
(− k +√k
2
− ωo
2
)t
+A 2e
(−k − √k
2
−ωo
2
)t
]
w A1 and A2 are two constants that depends on initial conditions of motion
--------------------------------- (2)
---------------------------- (3)
Displacement of the oscillator
from mean position at time ‘t’.
k is the damping constant.
ω0 is the natural angular frequency in the
absence of damping
Depending on relative values of k and ω0 we have three different cases.
1. k > ω0 Over damped
2. k = ω0 Critically damped
3. k < ω0 Under damped](https://image.slidesharecdn.com/1-240805134919-2ddccaba/85/1-Oscillation-engineering-physics-ppsx-11-320.jpg)
![Case 2: Critically damped (k = ω0 )
13
When k = ω0, eqn (3) becomes
) = B where B= --------------------------------- (5)
Since above equation has only one constant, it does not form solution of a second order differential equation.
Therefore, we shall put = h, a very small positive quantity (h→0).
]
}
]
]
]
where D= A1+A 2 and E=(A1− A2)h
x
t
0
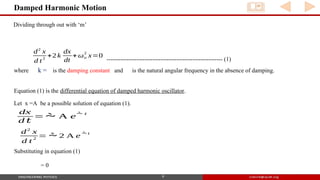
Initially the displacement increases slightly due to the factor D+Et. But as time elapses, the exponential term become
dominant factor and as a result displacement will returns continuously to zero, without changing direction, even faster than
over damped condition. This type of motion is non-oscillatory or aperiodic.
Applications: speedometer, multimeter, pressure gauge](https://image.slidesharecdn.com/1-240805134919-2ddccaba/85/1-Oscillation-engineering-physics-ppsx-13-320.jpg)
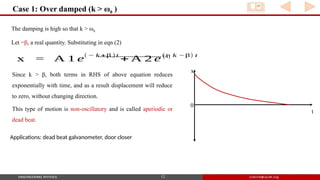
![Case 3: Under damped (k < ω0 )
Whendamping is very low ,k<ω 0
= = i and i=
Substituting in eqn (3)
]
]
]
14
The displacement ‘x’ being a real quantity, both must be real and so both A1 and A2 are complex.
Let φ
and = φ
]
x =a 0 e−kt
sin ¿
sin (A+B)=sinAcosB + cosAsinB
]
---------------------------- (6)](https://image.slidesharecdn.com/1-240805134919-2ddccaba/85/1-Oscillation-engineering-physics-ppsx-14-320.jpg)

![22
Forced or Driven Harmonic Oscillator
− p 2 A sin( pt −θ)+2 kpA cos( pt −θ)+ωo
2
A sin( pt − θ)=f o sinpt
)
Comparing coeffieicents of sin ( pt −θ) ∧cos ( pt − θ)
(ω¿¿o2
− p2)A=focosθ¿
2kpA=f osin θ
- - - - - - - - - - - - - - - - - - - - - - (6)
- - - - - - - - - - - - - - - - - - - - - - (7)
Divide eqn(7)witheqn(6)
f osinθ
f ocosθ
=
2kpA
(ω¿¿ o
2
− p2) A¿
tan θ=
2 kp
ωo
2
− p 2
(ω¿¿o2
− p2)2 A2+4k2p2 A2=fo2cos2θ+f o2sin2θ¿
] =
A2=
f o2
(ω¿¿o
2
− p2)2+4k2p2¿
Squaring∧addingeqn(7)∧eqn(6)
A=
f o
√(ω¿¿o
2
− p2)2+4k2p2¿
- - - - - (8)](https://image.slidesharecdn.com/1-240805134919-2ddccaba/85/1-Oscillation-engineering-physics-ppsx-22-320.jpg)
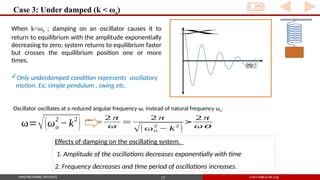
![23
Forced Harmonic Oscillator
So particular integral is
x =
f o
√(ω¿¿o2
− p2)2+4k2 p2sin(pt−θ)¿
- - - - - - - - - - - - -- - - - - - - - - - - - - - - - - - - - - - (9)
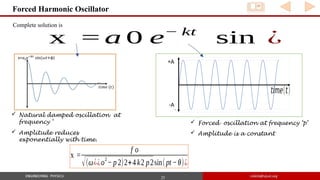
Complete solution of equation (2) is {substituting from eqns (2) and (9)}
x = a o e− kt
sin
¿
where θ=tan
− 1
[ 2 kp
ωo
2
− p 2 ]](https://image.slidesharecdn.com/1-240805134919-2ddccaba/85/1-Oscillation-engineering-physics-ppsx-23-320.jpg)
![26
Amplitude Resonance
Resonance is the phenomenon by which the amplitude of the forced harmonic oscillator becomes maximum at
a particular driving frequency which is very close to its natural frequency.
Frequency at which resonance occur is known as resonant frequency (pR).
A=
f o
√(ω¿¿o
2
−p2)2+4k2p2¿
Amplitude of a forced harmonic oscillator is given by
Value of A =Amax when the denominator is minimum.
]= 0
−2 (ω ¿¿ o2
− p 2) x 2 p+ 8 k 2 p=0 ¿
−(ω ¿¿ o2
− p 2) x 4 p+ 2 k 2 x 4 p=0 ¿
− (ω ¿¿ o2
− p 2)+ 2 k 2= 0 ¿
p 2= ω o
2
− 2 k 2
p=p R=√ωo
2
− 2 k 2
is the resonant frequency](https://image.slidesharecdn.com/1-240805134919-2ddccaba/85/1-Oscillation-engineering-physics-ppsx-26-320.jpg)
![27
Amplitude at Resonance
Amax=
f o
√(ω¿¿o2
− p R2)2+4k 2 pR 2¿
When p=pR
A max=
f o
√[ω ¿¿ o
2
−(√ωo
2
−2 k 2)2]2+4 k 2 p R 2¿
A max =
f o
2 k √ k 2 + p R 2
For low damping k2
can be neglected and so
p = p R = ω o
𝐀𝐦𝐚𝐱=
𝐟 𝐨
𝟐𝐤 𝛚𝐨
=
𝐟 𝐨𝛕
𝛚𝐨 pR
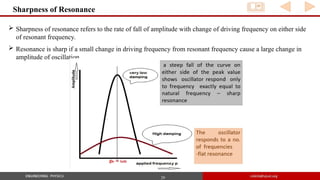
Low damping
Medium
damping
High damping](https://image.slidesharecdn.com/1-240805134919-2ddccaba/85/1-Oscillation-engineering-physics-ppsx-27-320.jpg)