Download as ODP, PPTX




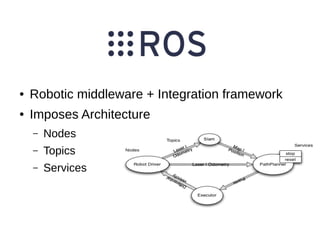


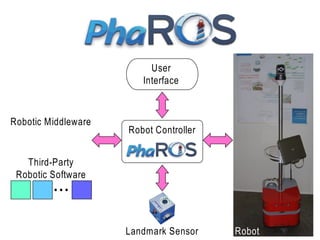
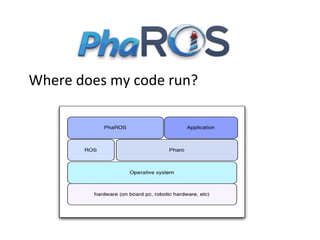
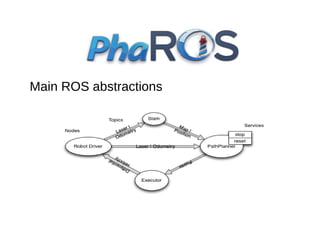
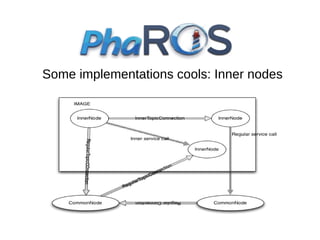
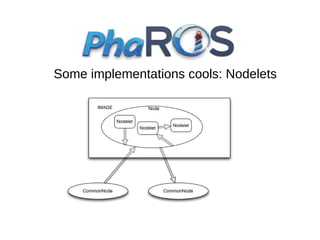
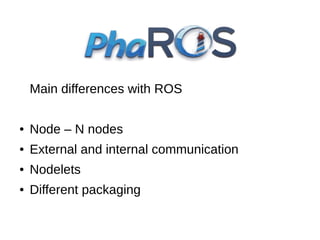


The document discusses PhaROS, a framework for robotic behavior development based on the Robot Operating System (ROS) architecture. PhaROS aims to provide high-level abstractions to ROS and make it easier to program robots for tasks like navigation in unknown environments. It introduces concepts like nodes, topics, and services from ROS. PhaROS includes tools like a command line interface for installing, creating, and distributing robot software packages. Examples of implementations using PhaROS include drivers for robots and localization algorithms.

































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)











