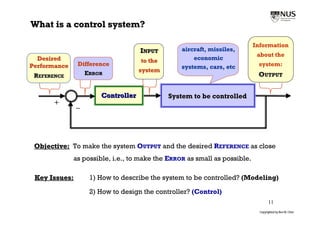
1. What is a control system?
Information
INPUT aircraft, missiles,
about the
Desired to the economic
Performance Difference systems, cars, etc system:
ERROR system
REFERENCE OUTPUT
Controller System to be controlled
+
–
Objective: To make the system OUTPUT and the desired REFERENCE as close
as possible, i.e., to make the ERROR as small as possible.
Key Issues: 1) How to describe the system to be controlled? (Modeling)
2) How to design the controller? (Control)
11
Copyrighted by Ben M. Chen
2. Back to systems – block diagram representation of a system
u(t) y(t)
System
u(t) is a signal or certain information injected into the system, which is called the
system input, whereas y(t) is a signal or certain information produced by the
system with respect to the input signal u(t). y(t) is called the system output. For
example,
R1
input: voltage source
+ output: voltage across R2
+
u(t) R2 y(t)
─ R2
y (t ) u (t )
R1 R2
16
Copyrighted by Ben M. Chen
3. Linear systems
u(t) y(t)
System
Let y1(t) be the output produced by an input signal u1(t) and y2(t) be the output
produced by another input signal u2(t). Then, the system is said to be linear if
a) the input is u1(t), the output is y1(t), where is a scalar; and
b) the input is u1(t) + u2(t), the output is y1(t) + y2(t).
Or equivalently, the input is u1(t) + u2(t), the output is y1(t) + y2(t). Such a
property is called superposition. For the circuit example on the previous page,
u1 (t ) u 2 (t )
R2 R2 R2
y (t ) u1 (t ) u 2 (t ) y1 (t ) y 2 (t )
R1 R2 R1 R2 R1 R2
It is a linear system! We will mainly focus on linear systems in this course.
17
Copyrighted by Ben M. Chen
4. Example for nonlinear systems
Example: Consider a system characterized by
y (t ) 100u 2 (t )
Step One:
y1 (t ) 100u12 (t ) & y 2 (t ) 100 u 2 (t )
2
Step Two: Let u (t ) u1 (t ) u 2 (t ), we have
y (t ) 100u 2 (t ) 100[u1 (t ) u2 (t )]2 100[u12 (t ) u2 (t ) 2u1 (t )u2 (t )]
2
y1 (t ) y2 (t ) 200u1 (t )u2 (t ) y1 (t ) y2 (t )
The system is nonlinear.
Exercise: Verify that the following system
y (t ) cos(u (t ))
is a nonlinear system. Give some examples in our daily life, which are nonlinear.
18
Copyrighted by Ben M. Chen
5. Time invariant systems
u(t) y(t)
System
A system is said to be time-invariant if for a shift input signal u( t t0), the output of
the system is y( t t0). To see if a system is time-invariant or not, we test
a) Find the output y1(t) that corresponds to the input u1(t).
b) Let u2(t) = u1(tt0) and then find the corresponding output y2(t).
c) If y2(t) = y1(tt0), then the system is time-invariant. Otherwise, it is not!
In common words, if a system is time-invariant, then for the same input signal, the
output produced by the system today will be exactly the same as that produced
by the system tomorrow or any other time.
19
Copyrighted by Ben M. Chen
6. Example for time invariant systems
Consider the same circuit, i.e.,
R2
y (t ) u (t )
R1 R2
Obviously, whenever you apply a same voltage to the circuit, its output will always
be the same. Let us verify this mathematically.
Step One:
R2 R2
y1 (t ) u1 (t ) y1 (t t 0 ) u1 (t t 0 )
R1 R2 R1 R2
Step Two: Let u 2 (t ) u1 (t t 0 ), we have
R2 R2
y 2 (t ) u 2 (t ) u1 (t t 0 ) y1 (t t 0 )
R1 R2 R1 R2
By definition, it is time-invariant!
20
Copyrighted by Ben M. Chen
7. Example for time variant systems
Example 1: Consider a system characterized by
y (t ) cos(t )u (t )
Step One:
y1 (t ) cos(t ) u1 (t ) y1 (t t 0 ) cos(t t 0 ) u1 (t t 0 )
Step Two: Let u 2 (t ) u1 (t t 0 ) , we have
y 2 (t ) cos(t ) u 2 (t ) cos(t ) u1 (t t 0 ) y1 (t t 0 )
The system is not time-invariant. It is time-variant!
Example 2: Consider a financial system such as a stock market. Assume that you
invest $10,000 today in the market and make $2000. Is it guaranteed that you will
make exactly another $2000 tomorrow if you invest the same amount of money? Is
such a system time-invariant? You know the answer, don’t you?
21
Copyrighted by Ben M. Chen
8. Systems with memory and without memory
u(t) y(t)
System
A system is said to have memory if the value of y(t) at any particular time t1 depends
on the time from to t1. For example,
+ dy (t ) 1
t
u(t) ~ C y(t) u (t ) C
dt
y (t )
C u(t )dt
─
On the other hand, a system is said to have no memory if the value of y(t) at any
particular time t1 depends only on the time t1. For example,
R1 + R2
+ y (t ) u (t )
u(t) R2 y(t) R1 R2
─
22
Copyrighted by Ben M. Chen
9. Causal systems
u(t) y(t)
System
A causal system is a system where the output y(t) at a particular time t1 depends on
the input for t t1. For example,
+ dy (t ) 1
t
u(t) ~ C y(t) u (t ) C
dt
y (t )
C u( )d
─
On the other hand, a system is said to be non-causal if the value of y(t) at a particular
time t1 depends on the input u(t) for some t > t1. For example,
y (t ) u (t 1)
in which the value of y(t) at t = 0 depends on the input at t = 1.
23
Copyrighted by Ben M. Chen
10. System stability
u(t) y(t)
System
The signal u(t) is said to be bounded if |u(t)| < < for all t, where is real scalar.
A system is said to be BIBO (bounded-input bounded-output) stable if its output y(t)
produced by any bounded input is bounded.
A BIBO stable system:
y (t ) e u ( t ) | y (t ) | e u ( t ) e e
A BIBO unstable system:
t t t
y (t ) u( )d
Let u (t ) 1, which is bounded. Then, y (t ) u( )d d
24
Copyrighted by Ben M. Chen
11. Linear differential equations
General solution:
n th order linear d n xt d n 1 xt
differential equation a n 1 a0 xt u t
dt n dt n 1
General solution xt x ss t xtr t
Steady state response x ss t particular integral obtained from assuming
with no arbitrary solution to have the same form as u t
constant
Transient response with xtr t general solution of homogeneou s equation
n arbitrary constants d n xtr t d n 1 xtr t
a n 1 a0 xtr t 0
dt n dt n 1
33
Copyrighted by Ben M. Chen
12. General solution of homogeneous equation:
n th order linear d n xtr t d n 1 xtr t
homogeneous equation n
a n 1 n 1
a0 xtr t 0
dt dt
Roots of polynomial roots : z1 , ,z n
from homogeneous
equation given by z z1 z z n z n an 1 z n 1 a0
General solution xtr t k1e z1t k n e z n t
(distinct roots)
General solution
xtr t k1 k 2 t k 3t 2 e13t k 4 k 5t e 22t k 6 e 31t k 7 e 41t
(non-distinct roots) if roots are 13, 13, 13, 22 , 22 , 31, 41
34
Copyrighted by Ben M. Chen
13. Particular integral:
x ss t Any specific solution (with no arbitrary constant)
of
d n xt d n 1 xt
an 1 a0 xt u t
dt n dt n 1
Method to determine Trial and error approach: assume x ss t to have
x ss t the same form as u t and substitute into
differential equation
Example to find x ss t for Try a solution of he 3t
dxt dx t
2 xt e3t dt
2 x t e 3t 3he 3t 2he 3t e 3t h0.2
dt
x ss t 0.2e 3t
Standard trial solutions u t trial solution for xss t
et het
t ht
tet h1h2t et
a cos t b sin t h1 cos t h2 sin t
35
Copyrighted by Ben M. Chen
15. RL circuit and governing differential equation
Consider determining i(t) in the following series RL circuit:
i (t)
t=0 5
3V 7H v(t)
where the switch is open for t < 0 and is closed for t 0.
Since i(t) and v(t) will not be equal to constants or sinusoids for all time, these
cannot be represented as constants or phasors. Instead, the basic general
voltage-current relationships for the resistor and inductor have to be used:
37
Copyrighted by Ben M. Chen
16. For t < 0 5 i (t)
i (t)
t =0 5
t<0
3 v(t) = 7
d i(t) 5 i (t)
7
dt
i (t) = 0
5
3 7 d i(t)
v(t) = 7
dt
3 5 i (t) = 0
i (t) = 0
voltage cross
5
over the switch
d i(t)
3 KVL 7 v(t) = 7 =0
dt
38
Copyrighted by Ben M. Chen
17. t 0
0 5 i (t)
i (t)
5
3 7 d i (t)
v(t) = 7
dt
Applying KVL: Mathematically, the above d.e. is often
written as
di t
7 5 i t 3, t 0
di t
5 i t u t , t 0
dt
7
dt
and i(t) can be found from determining the
general solution to this first order linear where the r.h.s. is u t 3, t 0
differential equation (d.e.) which governs and corresponds to the dc source or
the behavior of the circuit for t 0. excitation in this example.
39
Copyrighted by Ben M. Chen
18. Steady state response
iss t
3
Since the r.h.s. of the governing d.e. , t 0
5
dit
7 5it u t 3, t 0
dt
Let us try a steady state solution of diss t d 3 3
7 5iss t 7 5 3, t0
dt dt 5 5
iss t k , t 0
and is a solution of the governing d.e.
which has the same form as u(t), as a
possible solution.
In mathematics, the above solution is
called the particular integral or solution
di t
7 ss 5iss t 3
dt and is found from letting the answer to
70 5k 3 have the same form as u(t). The word
3 "particular" is used as the solution is only
k
5
one possible function that satisfy the d.e.
40
Copyrighted by Ben M. Chen
19. In circuit analysis, the derivation of iss(t) by letting the answer to have the same form
as u(t) can be shown to give the steady state response of the circuit as t .
t
i (t) = k Using KVL, the steady state
5
response is
3 7 d i(t)
v(t) = 7
dt
3 0 5k 0 5k
3
k
5 i (t) = 5 k
5
3
it , t
i (t) = k 5
5
3 d i(t)
7 v(t) = 7 =0
dt This is the same as iss(t).
41
Copyrighted by Ben M. Chen
20. Transient response
To determine i(t) for all t, it is necessary to find the complete solution of the
governing d.e.
di t
7 5i t u t 3, t 0
dt
From mathematics, the complete solution can be obtained from summing a
particular solution, say, iss(t), with itr(t): i t iss t itr t , t 0
where itr(t) is the general solution of the homogeneous equation
di t
5
t
7 5i t 0, t 0 i tr t k 1 e z1 t
k1 e 7 , t0
dt
di t where k1 is a constant (unknown now).
7 tr 5itr t
dt ditr t 5
replaced by z t
dt
itr t k1e 7 0, t
7 z 5z 7 z 5
1 0
Thus, it is called transient response.
5
z1 42
7 Copyrighted by Ben M. Chen
21. Complete response
To see that summing iss(t) and itr(t) gives the general solution of the governing ODE
di t
7 5i t 3, t 0
dt
note that
3 d 3 5 3 3,
i ss t , t0 satisfies 7 t0
5 dt 5 5
5
t
d 7t 7t
5 5
itr t k1e 7 , t 0 satisfies 7 k1e 5 k1e 0, t 0
dt
t
5
3 t
5
3 t
5
i ss t itr t 3 k 1 e 7 , t 0 satisfies 7
d k1e 7 5 k1e 7 3
5 dt 5 5
5
3 t
i t iss t itr t k1e 7 , t 0 is the general solution of the ODE
5
43
Copyrighted by Ben M. Chen
22. 3
5
i ss ( t )
0 steady state
response
t <0 t 0
Switch
close
k1
5t
i tr ( t ) = k 1e 7 , t0
k1 transient response
e
0
t =0 t = 7 (Time constant) k1 is to be
5
determined later
k1 + 3
5
i ss ( t ) + i tr ( t )
3 complete response
5
0 44
Complete response
Copyrighted by Ben M. Chen
23. Note that the time it takes for the transient or zero-input response itr(t) to decay to
1/e of its initial value is
7
Time taken for itr(t) to decay to 1/e of initial value
5
and is called the time constant of the response or system. We can take the
transient response to have died out after a few time constants. For the RC circuit,
100 At the time equal to 3 time
90
constants, the magnitude is
about 5% of the peak.
80
70
Magnitude in Percentage
At the time equal to 4 time
60
constants, the magnitude is
50
about 1.83% of the peak.
40
x 100/e
30
At the time equal to 5 time
20
constants, the magnitude is
10 about 0.68% of the peak
0
0 1 2 3 4 5 6 7 8 9 10
Time (second) 45
7/5
Copyrighted by Ben M. Chen
24. A cruise control system
acceleration
x
A cruise-control
x displacement
system friction
force b x mass force u
m
By the well-known Newton’s Law of motion: f = m a, where f is the total force applied
to an object with a mass m and a is the acceleration, we have
b u
u bx m
x
x x
m m
This a 2nd order Ordinary Differential Equation with respect to displacement x. It can
be written as a 1st order ODE with respect to speed v = x :
b u
v
v model of the cruise control system, u is input force, v is output.
m m
60
Copyrighted by Ben M. Chen
25. Assume a passenger car weights 1 ton, i.e., m = 1000 kg, and the friction coefficient
of a certain situation b = 100 N·s/m. Assume that the input force generated by the car
engine is u = 1000 N and the car is initially parked, i.e., x(0) = 0 and v(0) = 0. Find the
solutions for the car velocity v(t) and displacement x(t).
For the velocity model,
model
b u
v
v v 0.1v 1
m m
The steady state response: It is obvious that vss = 10 m/s = 36 km/h
The transient response: Characteristic polynomial z + 0.1 = 0, which gives z1 = 0.1.
10
0.1t 0.1t
vtr (t ) k1e v(t ) vss vtr (t ) 10 k1e
8
v(0) = 0 implies that k1 = 10 and hence
Velocity (m/s)
6
4
0.1t
v(t ) vss vtr (t ) 10 10e
2
61
What is the time constant for this system? 0
0 20 40 60 80 100
Time (second)
26. For the dynamic model in terms of displacement,
u bx m
x 0.1x 1
x
The steady state response: From the solution for the velocity, which is a constant, we
can conclude that the steady state solution for the displacement is xss = vsst = 10t.
The transient response: Characteristic polynomial z2 + 0.1z = 0, which gives z1 = 0.1
and z2 = 0. The transient solution is then given by
xtr (t ) k1e 0.1t k 2 e 0t k1e 0.1t k 2
and hence the complete solution
x(t ) xss xtr (t ) 10t k1e 0.1t k 2 v(t ) x(t ) 10 0.1k1e 0.1t
x(0) = 0 implies k1 + k2 = 0 and v(0) = 0 implies 10 0.1 k1 = 0. Thus, k1 = 100, k2 = 100.
x(t ) 10t 100e 0.1t 100
62
Copyrighted by Ben M. Chen
27. Complete response for the car displacement
800
700
600
500
Displacement (m)
400
300
200
100
0
0 10 20 30 40 50 60 70 80
Time (second)
Exercise: Show that the car cruise control system is BIBO stable for its velocity model
and it BIBO unstable for its displacement model.
63
Copyrighted by Ben M. Chen
28. Behaviors of a general 2nd order system
Consider a general 2nd order system (an RLC circuit or a mechanical system or
whatever) governed by an ODE
a(t ) by (t ) cy (t ) u (t )
y
Its transient response (or natural response) is fully characterized the properties of
its homogeneous equation or its characteristic polynomial, i.e.,
a(t ) by (t ) cy (t ) 0 az 2 bz c 0
y
The latter has two roots at
two real distinct roots if b2 4ac > 0
b b 2 4ac
z1, 2 = two complex conjugate roots if b2 4ac < 0
2a
two identical roots if b2 4ac = 0
These different types of roots give different natures of responses. 64
Copyrighted by Ben M. Chen
29. Overdamped systems
Overdamped response is referred to the situation when the characteristic polynomial
has two distinct negative real roots, i.e., ab > 0 & b2 4ac > 0. For example,
(t ) 6 y (t ) 5 y (t ) 0
y
which has a characteristic polynomial,
z 2 6 z 5 0 z1, 2 1, 5 y (t ) k1e t k 2 e 5t , y (t ) k1e t 5k 2 e 5t
Assume that y (0) 0, y (0) 4 , which implies
1
0.8
y (0) k1 k 2 0 0.6
k1 1, k 2 1 0.4
y (0) k1 5k 2 4
0.2
Magnitude
0
and thus, -0.2
y (t ) e t e 5t -0.4
-0.6
-0.8
What is the dominating time constant? -1 65
0 1 2 3 4 5 6 7 8 9 10
Time (second)
30. Underdamped systems
Underdamped response is referred to the situation when the characteristic polynomial
has two complex conjugated roots negative real part, i.e., ab > 0 & b2 4ac < 0. For
example,
(t ) 2 y (t ) 101 y (t ) 0
y
which has a characteristic polynomial,
z 2 2 z 101 0 z1, 2 1 j10 y (t ) k1e ( 1 j10 )t k 2 e ( 1 j10 )t e t (k1e j10t k 2 e j10t )
y (t ) e t [k1 (cos10t j sin 10t ) k 2 (cos10t j sin 10t )] e t [(k1 k 2 ) cos10t j (k1 k 2 ) sin 10t ]
Assume that y (0) 0, y (0) 10 , which implies
y (0) k1 k 2 0
j (k 1k 2 ) 1 y (t ) e t sin 10t
y (0) (k1 k 2 ) j10(k 1k 2 ) 10
The time constant for such a system is determined by the exponential term.
66
Copyrighted by Ben M. Chen
31. Underdamped response
et
1
0.8
0.6
0.4
0.2
Magnitude
0
-0.2
-0.4
-0.6
-0.8
-1
0 1 2 3 4 5 6 7
et
Time (second)
67
Copyrighted by Ben M. Chen
32. Critically damped systems
Critically damped response is corresponding to the situation when the characteristic
polynomial has two identical negative real roots, i.e., ab > 0 & b2 4ac = 0. For example,
(t ) 2 y (t ) y (t ) 0
y
which has a characteristic polynomial,
z 2 2 z 1 0 z1, 2 1 y (t ) k1e t k 2te t e t (k1 k 2t )
y (t ) e t (k 2 k1 k 2t )
Assume that y (0) 1, y (0) 1 , which implies
1.4
1.2
y (0) k1 1
k1 1, k 2 2
1
y (0) k 2 k1 1
0.8
Magnitude
0.6
and thus 0.4
y (t ) e t (1 2t ) 0.2
68
0
0 2 4 6 8 10
Time (second)
33. Never damped (unstable) systems
Never damped response is corresponding to the situation when the characteristic
polynomial has at least one root with a nonnegative real part. For example,
(t ) y (t ) 0
y
which has a characteristic polynomial,
z 2 1 0 z1, 2 1 y (t ) k1e t k 2 et y (t ) k1e t k 2 et
Assume that y (0) 2, y (0) 0 , which implies
450
400
y (0) k1 k 2 2
k1 k 2 1 350
y (0) k 2 k1 0
300
Magnitude
250
and thus 200
y (t ) e t et
150
100
50
It is an unstable system. We’ll study more on it. 0
69
0 1 2 3 4 5 6
Time (second)
35. Introduction
Let us first examine the following time-domain functions:
1 2
1.5
0.5 1
0.5
Magnitude
Magnitude
0 0
-0.5
-0.5 -1
-1.5
-1 -2
0 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10
Time in Seconds Time in Seconds
A cosine function with a frequency f = 0.2 Hz. x (t ) cos0.4t sin 0.8t cos1.6t
Note that it has a period T = 5 seconds. What are frequencies of this function?
Laplace transform is a tool to convert time-domain functions into a frequency-domain
ones in which information about frequencies of the function can be captured. It is
often much easier to solve problems in frequency-domain with the help of Laplace
transform. 71
Copyrighted by Ben M. Chen
36. Laplace Transform
Given a time-domain function f (t), the one-sided Laplace transform is defined as
follows:
F ( s ) L f (t ) f (t )e st dt , s j
0
where the lower limit of integration is set to 0 to include the origin (t = 0) and to capture
any discontinuities of the function at t = 0.
The integration for the Laplace transform might not convert to a finite solution for
arbitrary time-domain function. In order for the integration to convert to a final value,
which implies that the Laplace transform for the given function is existent, we need
( j ) t t jt
| F ( s ) | f (t )e dt f (t ) e e dt f (t ) e t dt
0 0 0
for some real scalar = c . Clearly, the integration exists for all c, which is called
the region of convergence (ROC). Laplace transform is undefined outside of ROC.
72
Copyrighted by Ben M. Chen
37. Example 1: Find the Laplace transform of a unit step function f(t) = 1(t) = 1, t 0.
1 1 1 1 1 1
F ( s ) 1(t )e st dt e st dt e st e e 0 0 1
0 0 s 0 s s s s s
Clearly, the about result is valid for s = + j with > 0.
Example 2: Find the Laplace transform of an exponential function f (t) = e – a t, t 0.
1 s a t 1
F ( s) f (t )e st dt e at e st dt e s a t dt e
0 0 0
sa 0 sa
Again, the result is only valid for all s = + j with > a.
imag axis imag axis
real axis real axis
0 a
ROC for Example 1 ROC for Example 2 73
Copyrighted by Ben M. Chen
38. Example 3: Find the Laplace transform of a unit impulse function (t), which has the
following properties:
1. (t) = 0 for t 0
2. (0)
3. (t )dt 1, f (t ) (t )dt f (0) for any f (t)
4. (t) is an even function, i.e., (t) = (t)
Its Laplace transform is significant to many system and control problems. By definition,
L (t ) (t )e st dt e 0 1
0
Its ROC is the whole complex plane.
Obviously, impulse functions are non-existent in real life. We will learn from a tutorial
question on how to approximate such a function.
74
Copyrighted by Ben M. Chen
39. Inverse Laplace Transform
Given a frequency-domain function F(s), the inverse Laplace transform is to convert
it back to its original time-domain function f (t).
ROC
1 j
f (t ) L1 F ( s )
1
F ( s )e ds
st
1
2 j 1 j
This process is quite complex because it requires knowledge about complex analysis.
We use look-up table rather than evaluating these complex integrals.
The functions f(t) and F(s) are one-to-one pairing each other and are called Laplace
transform pair. Symbolically,
f (t ) F ( s )
75
Copyrighted by Ben M. Chen
40. Properties of Laplace transform:
1. Superposition or linearity:
La1 f1 (t ) a2 f 2 (t ) a1L f1 (t ) a2 L f 2 (t ) a1F1 ( s ) a2 F2 ( s )
Example: Find the Laplace transform of cos(t). By Euler’s formula, we have
cos(t )
2
1 j t
e e j t
By the superposition property, we have
1
1
Lcos(t ) L e jt e jt L e jt e jt
1
2 2 2
1 1 1 1 s j s j s
2
2 s j s j 2 ( s j )s j s 2
76
Copyrighted by Ben M. Chen
41. 2. Scaling:
If F(s) is the Laplace transform of f(t), then
1 s
L f ( at ) F
a a
Example: It was shown in the previous example that
Lcos(t )
s
s2 2
By the scaling property, we have
s s
1
Lcos(2t )
1 2 2 s
2 2
2 s 2
2s 4 2 s 4
2
2
4 4
which may also be obtained by replacing by 2. 77
Copyrighted by Ben M. Chen
42. 3. Time shift (delay): f(t)
If F(s) is the Laplace transform of f(t), then
f(t a)
L f (t a ) 1(t a) e as F ( s )
a
For a function delayed by ‘a’ in time-domain, the equivalence in s-domain is
multiplying its original Laplace transform of the function by eas.
Example:
Lcos t
s s
Lcos( (t a )) 1(t a ) e as
s2 2 s2 2
78
Copyrighted by Ben M. Chen
43. 4. Frequency shift:
If F(s) is the Laplace transform of f(t), then
Example: Given
cos(t )
s
and sin(t )
s2 2 s2 2
Using the shift property, we obtain the Laplace transforms of the damped sine and
cosine functions as
L e at cos(t )
sa
( s a) 2 2
and
L e at sin(t )
( s a) 2 2
79
Copyrighted by Ben M. Chen
44. 5. Differentiation:
Lf (t ) sL f (t ) f (0 ) sF ( s ) f (0 )
df (t )
L
dt
d 2 f (t )
L(t ) s L f (t ) sf (0 ) f (0 ) s F ( s ) sf (0 ) f (0 )
2 2
L 2
f
dt
6. Integration:
t 1
L f d L f (t ) F ( s )
1
0 s s
Example: The derivative of a unit step function 1(t) is a unit impulse function (t).
d
1(t ) (t )
dt
d 1 t 1
L (t ) L 1(t ) sL (t ) 1(0 ) s 0 1
1
1 L (t ) L d L (t )
1
dt s 0 s s
80
Copyrighted by Ben M. Chen
45. 7. Periodic functions:
If f (t) is a periodic function, then it can be represented as the sum of time-shifted
functions as follows:
f (t ) f1 (t ) f 2 (t ) f 3 (t )
f1 (t ) f1 (t T ) f1 (t 2T )
Applying time-shift property, we obtain
F ( s ) F1 ( s ) F1 ( s )e sT F1 ( s )e s 2T
T st
F1 ( s ) f (t )e dt
0
F1 ( s )(1 e sT e s 2T ) sT
1 e 1 e sT
81
Copyrighted by Ben M. Chen
46. 8. Initial value theorem:
Examining the differentiation property of the Laplace transform, i.e.,
Lf (t ) sL f (t ) f (0 ) sF ( s ) f (0 )
df (t )
L
dt
we have
df (t ) df (t ) st
sF ( s ) f (0 ) L e dt e st df (t ) 0, as s
dt 0 dt 0
Thus,
f (0 ) sF ( s ), as s or f (0 ) lim [ sF ( s )]
s
This is called the initial value theorem of Laplace transform. For example, recall that
sa
f (t ) e at cos(t ) F (s)
( s a) 2 2
s( s a) s 2 as
f (0) e cos(0) 1
0
lim [ sF ( s )] lim lim 2 1
s ( s a ) s s 2 as ( a )
2 2 2 2
s
82
Copyrighted by Ben M. Chen
47. 9. Final value theorem:
Examining again the differentiation property of the Laplace transform, i.e.,
Lf (t ) sL f (t ) f (0 ) sF ( s ) f (0 )
df (t )
L
dt
we have
df (t ) df (t ) st df (t ) 0t
lim [ sF ( s ) f (0 )] lim L lim e dt e dt f (t ) 0 f () f (0 )
s 0 s 0 dt s 0 0 dt 0 dt
Thus, The result is only valid for a function whose
f () lim [ sF ( s )] F(s) has all its poles in the open left-half
s 0 plane (a simple pole at s = 0 permitted)!
This is called the final value theorem of Laplace transform. For example,
sa
f (t ) e at cos(t ) F (s)
( s a) 2 2
s( s a) s 2 as
f ( ) e cos() 0 lim [ sF ( s )] lim lim 2 0
s 0 ( s a ) s 0 s 2 as ( a )
2 2 2 2
s 0
83
Copyrighted by Ben M. Chen
48. Summary of Laplace transform properties
Property f (t) F (s)
Linearity
Scaling
Time shift
Frequency shift
Time derivative
t
Time integration f d
0
F1 ( s )
Time periodicity
1 e sT
Initial value f (0 )
Final value
Convolution
84
Courtesy of Dr Melissa Tao
49. Some commonly used Laplace transform pairs
f (t ) F ( s) f (t ) F ( s)
(t ) 1
sin t
s2 2
1
1(t ) s
s cos t
s2 2
1 s sin cos
t sin(t )
s2 s2 2
tn
n! s cos sin
cos(t )
s n 1 s2 2
1
e at e at sin t
sa s a 2 2
te at
1 sa
e at cos t
s a 2 s a 2 2
85
Copyrighted by Ben M. Chen
50. Why Laplace transform?
Allows us to work with algebraic
equations rather than differential
equations.
Provides an easy way
to solve system
Applicable to a Laplace transform is
problems involving
wider variety of significant for many
initial conditions.
inputs than phasor reasons
analysis
Capable of giving us the total response (natural
and forced) of the circuit in one single operation.
86
Courtesy of Dr Melissa Tao
52. Frequency domain model of linear systems – transfer functions
A linear system expressed in terms of an ODE is called a model in the time domain. In
what follows, we will learn that the same system can be expressed in terms of a
rational function of s, the Laplace transform variable. Recall the cruise control system
u bx m
x m bx u
x
Assume that the initial conditions are zero. Taking Laplace transform on its both sides,
(ms 2 bs) X ( s ) ms 2 X ( s ) bsX ( s ) Lm bx Lu U ( s )
x
we obtain a rational function of s, i.e.,
X (s) 1 1
H (s) 2 X ( s ) H ( s )U ( s ) U (s)
U ( s ) ms bs ms bs
2
H(s) is the ratio of the system output (displacement) and input (force) in frequency
domain. Such a function is called the transfer function of the system, which fully
characterizes the system properties. 96
Copyrighted by Ben M. Chen
53. More example: the series RLC circuit
The ODE for the general series RLC circuit was derived earlier as the following:
d 2 vC t dv t
LC RC C vC t v(t )
dt 2 dt
Assume that all initial conditions are zero (note that for deriving transfer functions, we
always assume initial conditions are zero!).
d 2 vC t dvC t
( LCs RCs 1)VC ( s ) L LC
2
RC vC t Lv(t ) V ( s )
dt 2 dt
VC ( s ) 1 1
H (s) VC ( s ) H ( s )V ( s ) V ( s)
V ( s ) LCs 2 RCs 1 LCs RCs 1
2
H(s) is the ratio of the system output (capacitor voltage) and input (voltage source) in
frequency domain. The circuit (or the system) is fully characterized by the transfer
function. If the H(s) and V(s) are known, we can compute the system output. As such,
it is important to study the properties of H(s)! 97
Copyrighted by Ben M. Chen
54. System poles and zeros
As we have seen from the previous examples, a general linear time-invariant system
can be expressed in a frequency-domain model or transfer function:
U(s) Y(s)
H(s)
with
N ( s ) bm s m bm 1s m 1 b1s b0
H (s) n n 1
, mn
D( s) s an 1s a1s a0
n is called the order of the system. The roots of the numerator of H(s), i.e., N(s), are
called the system zeros (because the transfer function is equal to 0 at these points),
and the roots of the denominator of H(s), i.e., D(s), are called the system poles (the
transfer function is singular at these points). It turns out that the system properties are
fully captured by the locations of these poles and zeros…
98
Copyrighted by Ben M. Chen
55. Examples:
1
1 m
The cruise control system has a transfer function H ( s ) 2
ms bs s ( s b )
m
It has no zero at all and two poles at s 0, s b m
1
The RLC circuit has a transfer function H ( s )
LCs 2 RCs 1
It has no zero and two poles at
RC ( RC ) 2 4 LC RC ( RC ) 2 4 LC
s1 , s2
2 LC 2 LC
which are precisely the same as the roots of the characteristic polynomial of its ODE.
5s 2 10 s 5 5( s 1) 2
The system H ( s ) 3 has two zeros (repeated)
s 6 s 11s 6 ( s 1)( s 2)( s 3)
2
at s = 1 and three poles at s 1, s 2, s 3 , respectively.
99
Copyrighted by Ben M. Chen
56. Response to sinusoidal inputs
Let us consider the series RL circuit whose current governed by the following ODE
di t I (s) 0 .2
5 5 i t v t ( 5 s 5) I ( s ) V ( s ) H (s)
dt V (s) s 1
Let the voltage source be a sinusoidal v(t) = cos (2t), which has a Laplace transform
s 0 .2 0.2 s A Bs C
V (s) I ( s) V (s) 2 2
s 4
2
s 1 s 1 s 4 s 1 s 4
Using the coefficient matching method, we have to match
( A B ) s 2 ( B C ) s ( 4 A C ) 0 .2 s 0.04 s 0.16 0.04 0.04 s 0.08 2 0.04
I (s)
s2 4 s 1 s 2 22 s 2 22 s 1
A B 0 A 0.04
B C 0.2 B 0.04
4 A C 0
C 0.16
i (t ) 0.04[cos(2t ) 2 sin( 2t ) e t ]
The steady state response is the given by
iss (t ) 0.04[cos(2t ) 2 sin(2t )] 0.0894 cos(2t 63.4349 ). 100
Copyrighted by Ben M. Chen
57. Let us solve the problem using another approach. Noting that v(t) = cos (2t), which
has an angular frequency of = 2 rad/sec, and noting that the transfer function
I (s) 0 .2
H (s)
V (s) s 1
is nothing more than the ratio or gain between the system input and output in the
frequency domain. Let us calculate the ‘gain’ of H(s) at the particular frequency
coinciding with the input signal, i.e., at s = j with = 2.
0 .2 0 .2
H ( j 2 ) H ( j ) 2 0.0894 e j1.1071 0.0894 63 .4349
j 1 2 j 2 1
It simply means that at = 2 rad/sec, the input signal is amplified by 0.0894 and its
phase is shifted by 63.4349 degrees. It is obvious then the system output, i.e., the
current in the circuit at the steady state is given by
iss (t ) 0.0894 cos(2t 63.4349 ).
which is identical to what we have obtained earlier. Actually, by letting s = j, the
above approach is the same as the phasor technique for AC circuits. 101
Copyrighted by Ben M. Chen
58. Frequency response – amplitude and phase responses
It can be seen from the previous example that for an AC circuits or for a system with a
sinusoidal input, the system steady state output can be easily evaluated once the
amplitude and phase of its transfer function are known. Thus, it is useful to ‘compute’
the amplitude and phase of the transfer function, i.e.,
H ( j ) H ( s ) s j H ( j ) H ( j )
It is obvious that both magnitude and phase of H(j) are functions of . The plot of
|H(j)| is called the magnitude (amplitude) response of H(j) and the plot of H(j) is
called the phase response of H(j). Together they are called the frequency response
of the transfer function. In particularly, |H(0)| is called the DC gain of the system (DC is
equivalent to k cos(t) with = 0).
The frequency response of a circuit or a system is an important concept in system
theory. It can be used to characterize the properties of the circuit or system, and used
to evaluated the system output response. 102
Copyrighted by Ben M. Chen
59. Example:
Let us reconsider the series RL circuit with the following transfer function:
I (s) 0 .2 0 .2 0 .2
H (s) H ( j ) H ( j ) H ( j ) tan 1
V (s) s 1 j 1 1 2
Thus, it is straightforward, but very tedious, to compute its amplitude and phase.
0.01 H ( j ) 0.2, H ( j ) 0.57 0.2
0.15
0.1 H ( j ) 0.199, H ( j ) 5.71
Magnitude
0.1
0.2 H ( j ) 0.196, H ( j ) 11.31
0.05
0.5 H ( j ) 0.179, H ( j ) 26.57
0
-2 -1 0 1 2 3
1 H ( j ) 0.141, H ( j ) 45 10 10 10 10 10 10
Frequency (rad/sec)
0
2 H ( j ) 0.089, H ( j ) 63.43
5 H ( j ) 0.039, H ( j ) 78.69 Phase (degrees)
-50
10 H ( j ) 0.020, H ( j ) 84.29
100 H ( j ) 0.002, H ( j ) 89.43 -100
-2 -1 0 1 2 3
10 10 10 10 10 10
1000 H ( j ) 0.0002, H ( j ) 89.94 Frequency (rad/sec)
103
Copyrighted by Ben M. Chen
60. Note that in the plots of the magnitude and phase responses, we use a log scale
for the frequency axis. If we draw in a normal scale, the responses will look awful.
There is another way to draw the frequency response. i.e., directly draw both
magnitude and phase on a complex plane, which is called the polar plot. For the
example considered, its polar plot is given as follows:
0.1 0.2
0.08 0.15
Magnitude
0.06 0.1
0.04
0.05
0.02
0
imag axis
-2 -1 0 1 2 3
10 10 10 10 10 10
0
Frequency (rad/sec)
0
-0.02
-20
Phase (degrees)
-0.04
-40
-0.06
-60
-0.08 -80
-0.1 -100
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 10
-2 -1
10 10
0
10
1
10
2
10
3
read axis Frequency (rad/sec)
The red-line curves are more accurate plots using MATLAB. 104
Copyrighted by Ben M. Chen
61. What can we observe from the frequency response?
0.2
0.15
Magnitude
0.1
0.05
0
-2 -1 0 1 2 3
10 10 10 10 10 10
Frequency (rad/sec)
0
-20
Phase (degrees)
-40
-60
-80
-100
-2 -1 0 1 2 3
10 10 10 10 10 10
Frequency (rad/sec)
At low frequencies, magnitude
At low frequencies, magnitude For large frequencies, the magnitude
For large frequencies, the magnitude
response is relatively aalarge.
response is relatively large. response is small and thus signals
response is small and thus signals
Thus, the corresponding output
Thus, the corresponding output with large frequencies is attenuated
with large frequencies is attenuated
will be large.
will be large. or blocked.
or blocked.
105
Copyrighted by Ben M. Chen
63. Bode plot
The plots of the magnitude and phase responses of a transfer function are called the
Bode plot. The easiest way to draw Bode plot is to use MATLAB (i.e., bode function).
However, there are some tricks that can help us to sketch Bode plots (approximation)
without computing detailed values. To do this, we need to introduce a scale called dB
(decibel). Given a positive scalar a, its decibel is defined as 20 log 10 ( a ) . For example,
a 1 20 log 10 ( a ) 0 a 0 dB
a 10 20 log 10 ( a ) 20 a 20 dB
a 100 20 log 10 ( a ) 40 a 40 dB
a 20 log 10 ( ) 20 log 10 ( ) 20 log 10 ( ) a in dB in dB
a 20 log 10 (
) 20 log 10 ( ) 20 log 10 ( ) a in dB in dB
In the dB scale, the product of two scalars becomes an addition and the division of
two scalars becomes a subtraction. 107
Copyrighted by Ben M. Chen
64. Bode plot – an integrator
We start with finding the Bode plot asymptotes for a simple system characterized by
1 1 1
H (s) H ( j ) H ( j ) H ( j ) 90
s j
Examining the amplitude in dB scale, i.e.,
1
20 log 10 H ( j ) 20 log 10 20 log 10 dB
it is simple to see that
1 20 log 10 H ( j1) 20 log 10 1 0 dB
10 20 log 10 H ( j10 ) 20 log 10 10 20 dB
2 101 20 log 10 H ( j 2 ) 20 log 10 2 20 log 10 101
20 log 10 10 20 log 10 1 20 20 log 10 1 dB
Thus, the above expressions clearly indicate that the magnitude is reduced by 20 dB
when the frequency is increased by 10 times. It is equivalent to say that the magnitude
times
108
is rolling off 20 dB per decade.
Copyrighted by Ben M. Chen
65. The phase response of an integrator is 90 degrees, a constant. The Bode plot of an
integrator is given by
Bode Diagram
20
rolling off
0
20 dB per
Magnitude (dB)
-20 decade
-40
-60
-89
-89.5
constant
Phase (deg)
-90
phase
-90.5 response
-91
-1 0 1 2 3
10 10 10 10 10
Frequency (rad/sec)
109
Copyrighted by Ben M. Chen