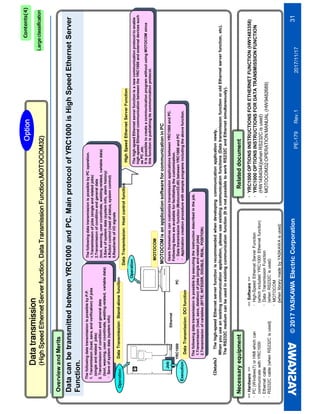
This document discusses Ethernet communication capabilities between a YRC1000 robot controller and a PC. It describes the high-speed Ethernet server function protocol for developing new communication applications and existing communication functions using RS-232C or an older Ethernet server protocol. It also outlines the MOTOCOM software for PC-based communication, including transmission of jobs, system data, robot control signals, and I/O signals. Customization of transmission applications is supported through provided library functions, sample programs, and documentation.