Download to read offline









![Demonstration
Scenario Design + Bug Classification
• Car 1 begins [0..1000]m from node C on edge 1 and
has a constant speed of [1..100]kph.
• Car 2 begins [0..1000]m from node C on edge 2 and
has a constant speed of [1..100]kph.](https://image.slidesharecdn.com/gossiccve2022-220921132619-0490258d/85/Goss_ICCVE-2022-pdf-26-320.jpg)
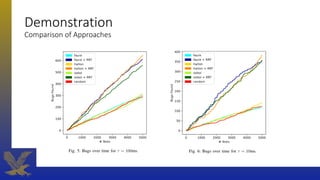
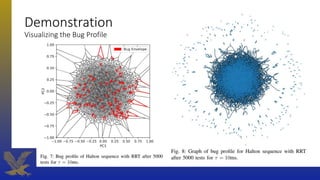



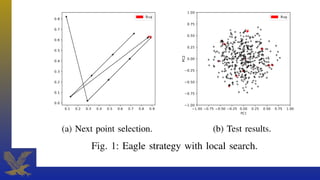
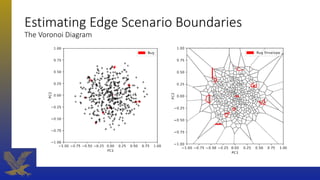
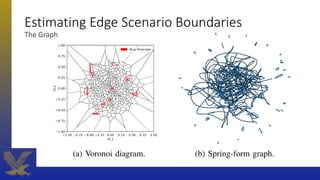
This document outlines a strategy for scenario-based validation of autonomous vehicles using the Eagle strategy with local search for selecting effective test scenarios. It discusses data from executed scenarios to estimate edge scenario boundaries and visualizes bug profiles using Voronoi diagrams. The conclusion emphasizes the efficiency of this approach in prioritizing interesting scenarios compared to traditional random sampling methods.












![[AAAI-16] Tiebreaking Strategies for A* Search: How to Explore the Final Fron...](https://cdn.slidesharecdn.com/ss_thumbnails/2016215aaai-160217025704-thumbnail.jpg?width=640&height=640&fit=bounds)