There are several types of common forces in mechanics. Contact forces require direct contact between objects and include tension, friction, spring forces, and drag forces. Friction includes static, kinetic, and rolling varieties. Non-contact forces act at a distance and include gravitational and electromagnetic forces. Pseudo forces do not exist physically but arise due to perspective in accelerated frames of reference. Understanding these various forces is essential for mechanics problems.
1. ESSON 2. FORCE SYSTEM
2.1 INTRODUCTION
Definition of ‘force’ can be given in several ways. Most
simply it can be defined as ‘the cause of change in the state of
motion of a particle or body’. It is of course, the product
(multiplication) of mass of the particle and its acceleration.
Force is the manifestation of action of one particle on the
other. It is a vector quantity.
2.2 CHARACTERISTICS OF A FORCE
A Force has following basic characteristics
i) Magnitude
ii) Direction
iii) Point of application
iv) Line of action
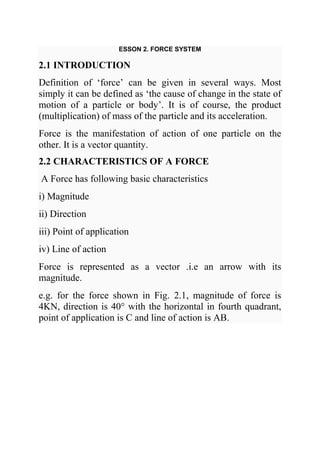
Force is represented as a vector .i.e an arrow with its
magnitude.
e.g. for the force shown in Fig. 2.1, magnitude of force is
4KN, direction is 40° with the horizontal in fourth quadrant,
point of application is C and line of action is AB.
2. Fig.2.1 Characteristics of a force
Smaller magnitudes of forces are measured in newton (N)
and larger in kilonewton (KN).
2.3 SYSTEMS OF FORCES
When a mechanics problem or system has more than one
force acting, it is known as a ‘force system’ or ‘system of
force’.
Fig.2.2 Force System
2.3.1 Collinear Force System
3. When the lines of action of all the forces of a system act along
the same line, this force system is called collinear force
system.
Fig.2.3 Force System
2.3.2 Parallel Forces
Fig.2.4 Force System
2.3.3 Coplanar Force System
When the lines of action of a set of forces lie in a single plane
is called coplanar force system.
2.3.4 Non-Coplanar Force System
When the line of action of all the forces do not lie in one
plane, is called Non-coplanar force system
4. Fig.2.5 Force System
2.3.5 Concurrent Force System
The forces when extended pass through a single point and the
point is called point of concurrency. The lines of actions of all
forces meet at the point of concurrency. Concurrent forces
may or may not be coplanar.
2.3.6 Non-concurrent Force System
When the forces of a system do not meet at a common point
of concurrency, this type of force system is called non-
concurrent force system. Parallel forces are the example of
this type of force system. Non-concurrent forces may be
coplanar or non-coplanar.
2.3.7 Coplanar and concurrent force system
A force system in which all the forces lie in a single plane and
meet at one point, For example, forces acting at a joint of a
roof truss (see fig.2.6)
P = External force
F1 to F5 = Member forces (internal) RA and RB = Reactions
5. C = Point of concurrency
Fig.2.6 Coplanar concurrent force system
2.3.8 Coplanar and non-concurrent force system
These forces do not meet at a common point; however, they
lie in a single plane, for example, forces acting on a beam as
shown in Fig.2.7:
Fig.2.7 Coplanar non-concurrent force system
2.3.9 Non-coplanar and concurrent force system
In this system, the forces lie in a different planes but pass
through a single point. Example is forces acting at the top end
of an electrical pole (see Fig.2.8)
6. Fig.2.8 Force System
Example 2.1: The tension in the guy wires OA and OB of the
electrical pole are 500 N and 300 N respectively as shown in
Fig.2.9. Determine the horizontal and vertical components of
these tensions exerted by the guy wires on the pole at O.
Fig 2.9
Solution: The tensions exerted by the guy wires on the pole at
O are acting as shown in the above figure. The components of
each of the forces are determined as given in the following
table:
Cable Force
P
Inclination
with x-axis
Ө
x-component
Px = P cos Ө
y-component
Py = P sin Ө
OB 500 N tan-1
6/2 =
71.57°
500 cos 71.57°
= 158.07 N
(→)
500 sin
71.57°
= 474.36 N
(↓)
7. OA 300 N tan-1
6/1.5 =
75.96°
300 cos 75.96°
= 72.78 N (←)
300 sin
75.96°
= 291.04 N
(↓)
2.3.10 Non-coplanar and non-concurrent force system
The forces which do not lie in a single plane and do not pass
through a single point are known as non-coplanar and non-
concurrent forces. Example is the loads transferred through
columns to the rectangular mat foundation as shown in
Fig.2.10.
Fig. 2.10 Non-coplanar non-concurrent force system
8. What is a system of forces?
Solution
System of forces:
A force system is a collection of forces that act at certain points (may also include
couples).
A force system is therefore the collection of forces depicted on any free body
diagram.
A force system is just a word that describes a collection of forces.
The system of force is mainly classified in Coplanar and Non-coplanar.
Characteristics of force system:
The different characteristics of force systems are:
1. The magnitude of the force
2. Point of application of the force
3. Direction
4. Line of action
9. Common Forces in Mechanics and Types of Forces
Last updated on May 11, 2023
Download As PDF
Overview
Test Series
Common Forces in Mechanics are friction force, drag force, tension, spring force,
pseudo force, etc. They are seen in most of our daily life problems. Hence, we call
them Common Forces in Mechanics. We studied how the forces act and work. Let’s
understand the concept of force and the different nature of these forces.
Force and its Types
The interaction, which after acting on a body, changes or tries to change the state of
rest or state of motion of the body is called force. There are six types of forces in
nature.
Conservative force
The force whose work is independent of the path followed is called conservative
force. The work done by the conservative force only depends on the initial point and
the final point. Hence, the work done by a conservative force in a closed loop is zero.
Example: Gravitational force, Electrostatic force, elastic force
Non-conservative force
If the work done by a force depends on the path followed by the particle then it is
called the non-conservative force.
Example: Friction force, air drag force, etc.
Constant force
The force that does not change with respect to time and distance is called constant
force. It always remains constant.
10. Variable force
The force that changes with respect to time and distance is called variable force. It is
a function of either time or distance or velocity etc.
Contact Force
Requires direct contact between the body and the agency of force.
Non-Contact Force
Does not require direct contact between the body and the agency of force.
In mechanics, we deal with only one type of non-contact force, that is, Gravity. There
are other non-contact type forces like magnetic force, electrostatic force, etc.
However, they do not come under the branch of mechanics. We shall know about
them in the upcoming articles. However, many questions asked in the exams are
majorly based on the different types of Contact Forces. Hence, we shall study them.
Crack CDS Exams with India's Super Teachers
Get 6 +2 Months SuperCoaching @ just
₹5999₹1749
Your Total Savings ₹4250
Purchase Now
11. Want to know more about this Super Coaching ?Explore SuperCoaching Now
Types of Contact Forces
1. Tension force
2. Friction force
3. Spring force
4. Drag force
5. Pseudo force
Let’s discuss each one in detail.
1. Tension force
It is a tension in the string due to which it balances the mass tied to it.
2. Friction Force
“When two objects are in contact and one object moves or intends to move, then a
force develops between the two surfaces called the frictional force”
In other words- “Friction is the force resisting the relative motion of solid surfaces”
For example, there is a friction force in the tyres of the car moving on the road. When
we push a heavy stone and the stone is not moving, it is due to friction force that
opposes the motion.
The friction force is usually denoted by “f”.
Friction force (f) = μ N
Where N is the normal force and μ is the coefficient of friction.
Types of Friction
Depending on the state of rest and state of motion, friction is classified into the
following:
Static Friction
The friction acting between the surfaces of two bodies when they are not moving
with respect to each other but tends to move is called static friction. It is the friction
when the body is at rest.
12. For example: When a block is kept at rest on a table and we apply some force to
move it but the block is not moving. Then the friction acting, in this case, is static
friction. Here force applied is balanced by the static friction force.
The static friction is adjusting friction. When the external force applied is increased
then the value of static friction also increases until it reaches a certain maximum
value. This maximum value is called the limiting value of static friction.
The static friction only comes into the picture when there is an external force applied
to the body. If a body is kept at rest and no force is applied to move the body then
no static friction will act.
The limiting value of static friction is independent of the area of contact. It only
depends on the nature of the surface and the normal force.
(fs)max=μsN(��)max=���
Where μsμ� is the coefficient of static friction and N is the normal force acting on the
block.
In general, the force of static friction is given by:
(fs)max≤μsN(��)max≤���
If the external force (F) exceeds this limiting friction (fs)max(��)��� then the block
starts moving on the surface.
Q. Determine the maximum acceleration of the bus in which a block lying on its
floor will remain stationary, given that the coefficient of static friction between
the block and the bus floor is 0.25.
13. Ans. Here the acceleration of the block will be due to the static friction by the floor.
Given that:
Coefficient of static friction(μs)(μ�) = 0.25
Let a is the maximum acceleration of the bus.
So the force on the block (F) = ma
Normal force (N) = mg
Thus the maximum acceleration of the bus = 2.5 m/s2�/�2
(fs)max≤μsN=0.25mg(��)max≤���=0.25��
F=(fs)max≤μsN=0.25mg�=(��)max≤���=0.25��
ma≤0.25mg��≤0.25��
a≤0.25g=0.25×10=2.5m/s2�≤0.25�=0.25×10=2.5�/�2
a≤2.5m/s2 �≤2.5�/�2
Kinetic Friction
The frictional force that opposes the relative motion between two surfaces is
called kinetic friction. It is denoted by fk��.
This friction comes into the picture only when there is a relative motion between two
surfaces.
It is also independent of contact area and depends only on the nature of the surface
and the normal force.
Kinetic friction (fk)=μkN(��)=μ��
Where μkμ� is the coefficient of kinetic friction and N is the normal force.
14. Q. What is the acceleration of the box and block system shown in the figure if
the coefficient of kinetic friction between the box and the surface is 0.05? Also,
find the tension in the string (Take g = 10 ms−2��−2). Neglect the mass of the
string.
Ans.
Given that:
Coefficient of kinetic friction (fk)(��) = 0.05
Let a be the acceleration of the block and the box.
For box; Normal (N) = 200 N
Friction (fk)=μkN(��)=μ�� = 0.05 × 200 = 10 N
T – (fk)(��) = 20 a
T – 10 = 20 a—— (1)
15. For block;
30 – T = 3 a —— (2)
Equation (1) + (2):
30 -10 = 23 a
Acceleration (a) = 20/23 = 0.87 m/s2�/�2
Tension (T) = 10 + 20 a = 10 + 20 × 0.87 = 27.4 N
Read about the Atom & Nuclei here.
Rolling Friction
When a body is rolling on a surface then the friction acting between the surface of
the body and the surface is called rolling friction.
In the case of rolling motion, there is no relative motion of the point of contact of the
surface with respect to the surface on which the body is moving.
During the rolling motion of a body, the surfaces in contact get momentarily
deformed a little, and this results in a finite area (not a point) of the body that is in
contact with the surface. The net effect is that the component of the contact force
parallel to the surface opposes motion.
Rolling friction is denoted by (fR)(��).
For example: When a wheel of the car is rolling on the road then the friction by the
road on the wheel is rolling friction. Friction on the wheel of cycle.
Points to Remember
o The static coefficient of friction is greater than the kinetic coefficient of friction.
o The coefficient of friction depends on the nature of the surface and the temperature.
16. o Rolling friction is always less than static friction because in order to roll any object
over a surface the force of friction between object and surface must be large enough
so that it can’t slide on it and perform a pure rolling motion.
o The work done by the rolling friction is zero because there is no relative motion of
the point of contact.
3. Drag Force
Drag force is the resistance faced by bodies inside a fluid. Fluids include both liquids
and gases.
FD=12CAV2��=12���2
where,
C is the drag coefficient,
A is the area of the object facing the fluid,
and ρ is the density of the fluid.
Consider an object falling through the air under the effect of gravity. The two forces
acting on it are the force of gravity and the drag force. The downward force of
gravity remains constant regardless of the mass and velocity of the object. However,
as the object velocity increases, the magnitude of the drag force also increases until
the magnitude of the drag force is equal to the gravitational force. Thus it produces a
net force of zero. Zero net force means that there is no acceleration. This can be
shown by Newton’s second law. At this point, the object’s velocity becomes constant
and we say that the object has reached its terminal velocity.
At the terminal velocity,
Fnet=mg−FD=ma=0����=��−��=��=0
Thus,
mg=FD��=��
Using the equation for drag force, we have
mg=1/2(CρAv2T)��=1/2(�ρ���2)
Solving for the velocity, we obtain
vT=2mg/ρCA−−−−−−−−√��=2��/ρ��
17. 4. Force in Spring
It is a restoring force that restores the spring into its original length.
F = – K x where k is spring constant, x is elongation or suppression of spring length
A negative sign shows that it works in opposition to the applied force.
5. Pseudo Forces:
When we observe any object with respect to an accelerated body then there is a
force acting on the object which we are observing. This force is called a pseudo force.
Pseudo force is an imaginary force.
Pseudo force (FP)(��) = ma
Where m is the mass of the object which we observe and a is the acceleration of the
body with respect to which we are observing the object.
Buy Testbook Pass
Types of Non-Contact Forces
These forces act at a distance.
1. Gravitational Force
The force of gravity exerted on one object by another due to its mass is called
gravitational force. It is directly proportional to the product of those objects’ masses
and inversely proportional to the square of the distance between them, according to
the inverse square law.
2. Electromagnetic Forces
Electromagnetic forces are forces that are exerted between charged particles or
objects that have electric charge. The electromagnetic force can be attractive or
repulsive, depending on the charge of the objects. Like charges repel each other,
while opposite charges attract.
We hope this article helped you to understand the important concept of the
Common Forces in Mechanics. For more such informative articles, updates, and
notes, get the Testbook App now! Download the App to access free mock tests and
practice sets and enhance your exam preparations today!
18. Check out other Important topics which will help you crack the examination:
Mechanical Properties of Fluids
Fluid Dynamics
Thermal Properties of Matter
Thermal Conductivity
Quantum Mechanics
Optics
Interference of Light
Ray Optics
Electromagnetic Devices
Mechanical Properties of Solids