Download to read offline

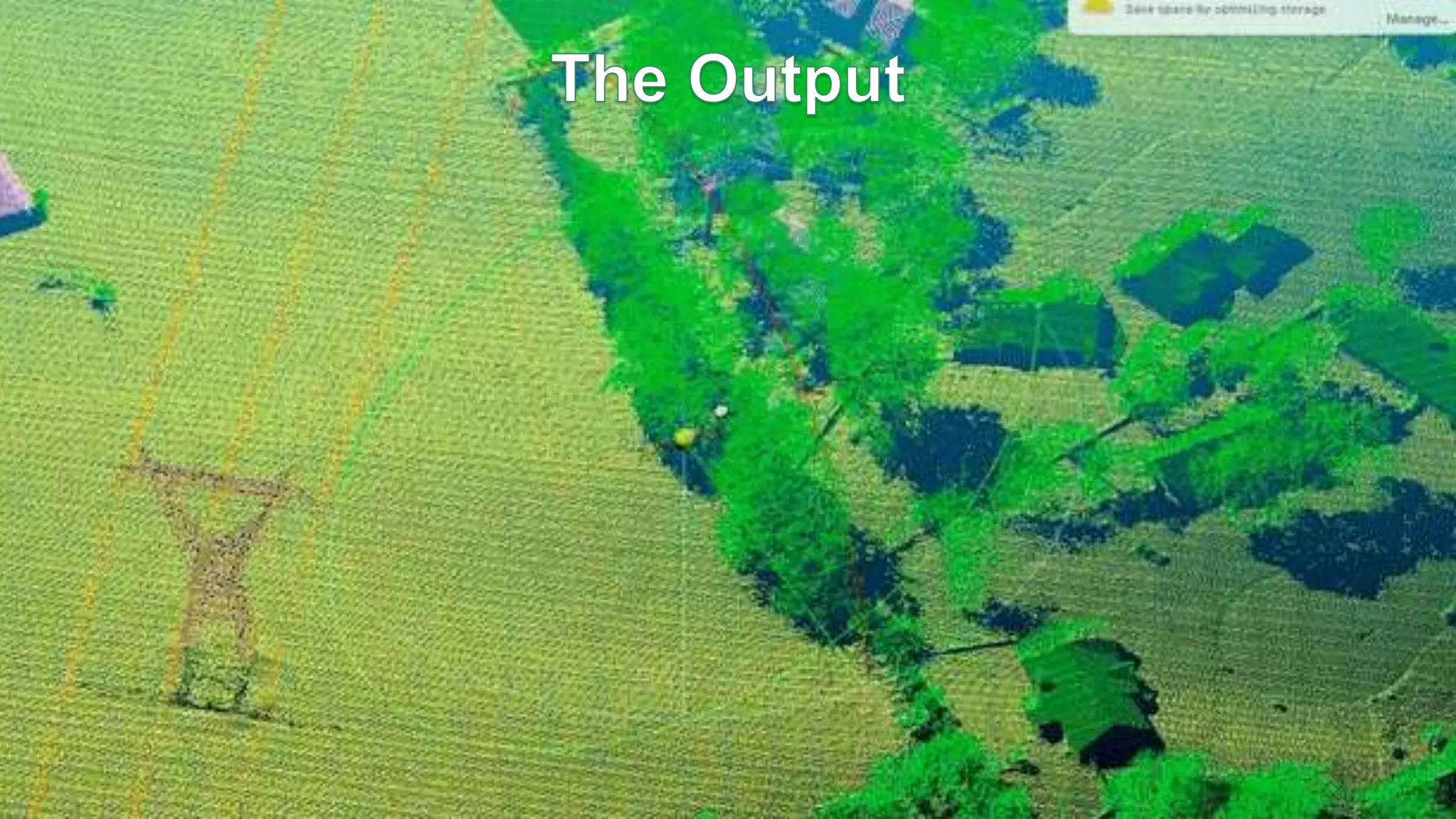



This document discusses challenges in object classification using LiDAR point cloud data compared to images. Point clouds can be much larger in size than images, ranging from 250-500 MB. While tools like OpenCV are mature for image analysis, PCL tools for point clouds have theoretical underpinnings that are not robust to real-world noisy data. The author's work involves creating noise-robust 3D pattern recognition techniques, dimensionality reduction methods for machine learning on point clouds using trigonometry and calculus, and generative adversarial networks to generate new diverse datasets.




































![exploring the wondors of cloud technology].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/exploringthewondorsofcloudtechnology-231016070322-adf37068-thumbnail.jpg?width=640&height=640&fit=bounds)











![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)

















