Downloaded 68 times

















![2. Physics of radar
Electromagnetic waves
Th e velocity of light in free space is
299,792,458 metres per second, but
who is timing? For the purposes of the
calculations in this book, we will call it
300,000 kilometres per second or
3 x 108 metres per second.
Maxwell’s theories of electromagnetism were confirmed by the
experiments of Heinrich Hertz. These
show that all forms of electromagnetic
radiation travel at the speed of light in
free space. This applies equally to long
wave radio transmissions, microwaves,
infrared, visible and ultraviolet light
plus X-rays and Gamma rays.
Maxwell showed that the velocity of
light in a vacuum in free space is given
by the expression :
Examples :-
1
co =
µo
εo
o
x
εo)
[Eq. 2.1]
velocity of electromagntic wave
in a vacuum in metres / second
the permeability of free space
(4 π x 10 -7 henry / metre)
the permittivity of free space
(8.854 x 10 -12 farad / metre)
c =
f xλ
[Eq. 2.2]
c
velocity of electromagnetic
waves in metres / second
f
λ
frequency of wave in second -1
wavelength in metres
The original cavity magnetron had
a wavelength of 9.87 centimetres.
This corresponds to a frequency of
3037.4 MHz (3.0374 GHz).
The frequency of a pulse radar
level transmitter may be 26 GHz
or 26 x 108 metres per second.
The wavelength is 1.15 centimetres.
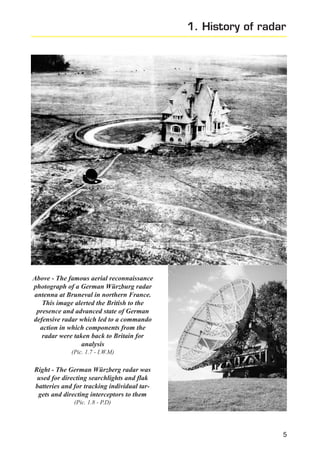
The electromagnetic waves have an
electrical vector E and a magnetic vector B that are perpendicular to each
other and perpendicular to the direction
of the wave. This will be discussed and
illustrated further in the section on
polarization. The electrical vector has
the major influence on radar applications.
λ
direction of wave
amplitude
co
(µ
The velocity of an electromagnetic
wave is the product of the frequency
and the wavelength.
Fig 2.1
13](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-19-320.jpg)

![Permittivity
In electrostatics, the force between
two charges depends upon the magnitude and separation of the charges and
the composition of the medium
between the charges. Permittivity ε is
the property of the medium that effects
the magnitude of the force. The higher
the value of the permittivity, the lower
the force between the charges. The
value of the permittivity of free
space (in a vacuum) εo, is calculated
indirectly and empirically to be:
8.854 x 10-12 farad / metre.
Relative permittivity or
dielectric constant εr
The ratio of the permittivity of a
medium to the permittivity of free
space is a dimensionless property
called ‘relative permittivity’ or ‘dielectric constant’. For example, at 20° C
the relative permittivity of air is close
to that of a vaccum and is only about
1.0005 whereas the relative permittivity of water at 20° C is about 80.
(Dielectric constant is also widely
known as DK.)
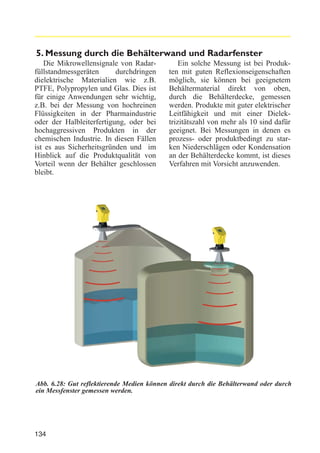
The value of the dielectric constant
of the product being measured is very
important in the application of radar to
level measurement. In non-conductive
products, some of the microwave energy will pass through the product and
the rest will be reflected off the surface.
This feature of microwaves can be
used to advantage or, in some circumstances, it can create a measurement
problem.
16
Permeability µ and relative
permeability µr
The magnetic vector, B, of an electromagnetic wave also has an influence
on the velocity of electromagnetic
waves. However, this influence is negligible when considering the velocity in
gases and vapours which are non-magnetic. The relative permeability of the
product being measured has no significant effect on the reflected signal when
compared with the effects of the relative permittivity or dielectric constant.
For the non-magnetic gases above the
product being measured, the value of
the relative permeability, µr = 1.
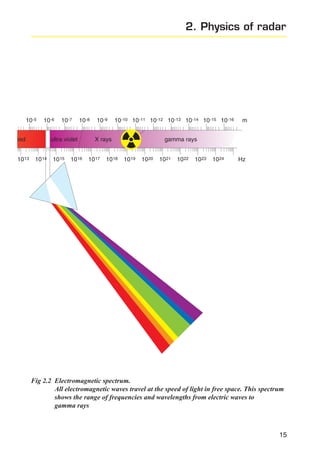
Frequency, velocity and wavelength
As we have already stated, the frequency (f), velocity (c) and wavelength
(λ) of the electromagnetic waves are
related by the equation c = f x λ.
The frequency remains uninfluenced
by changes in the propagation medium.
However, the velocity and wavelength
can change depending on the electrical
properties of the medium in which they
are travelling. The speed of propagation can be calculated using equation
2.3.
c =
co
(µ x ε )
r
c
co
µr
εr
r
[Eq. 2.3]
velocity of electromagnetic wave
in the medium in metres/second
velocity of electromagnetic
waves in free space
the relative permeability
(µ medium / µo)
the relative permittivity](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-22-320.jpg)

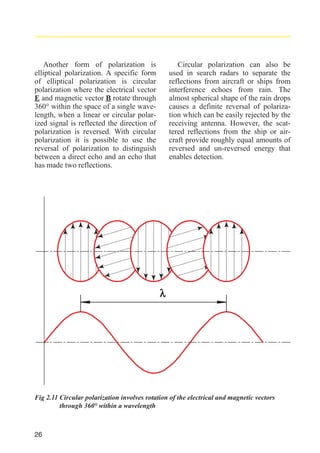
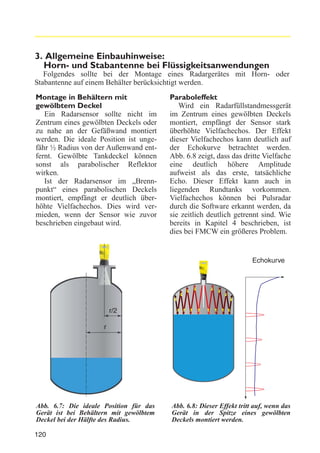
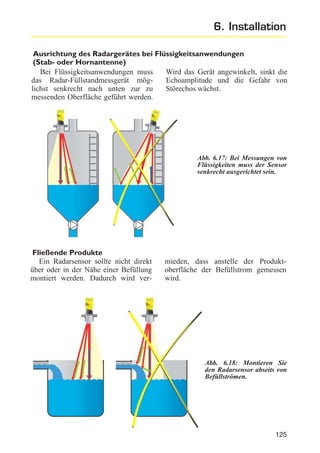
![The same effect can be experienced when looking at interface detection using
guided microwave level transmitters to detect oil and water or solvent and aqueous
based liquids.
Fig 2.4 Oil/water interface
detection using a
guided microwave
level transmitter. Note
that the water echo
has a reduced amplitude and appears to be
further away. The
running time of
microwaves in oil is
slower than in air
reference echo
(water without oil)
oil echo
water echo
Effects on the propagation
speed of microwaves
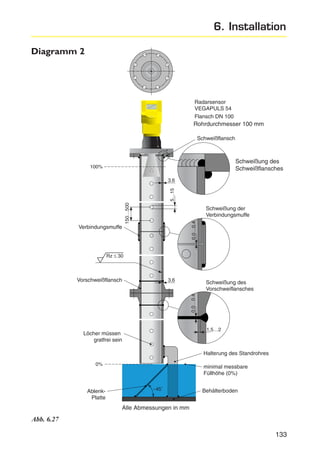
Microwave radar level transmitters
can be applied almost universally
because, as a measurement technique,
they are virtually unaffected by process
temperature, temperature gradient, vacuum and normal pressure variations,
gas or vapour composition and movement of the propagation medium.
However, changes in these process
conditions do cause slight variations in
the propagation speed because the
dielectric constant of the propagation
medium is altered.
Calculating the propagation
speed of microwaves
The temperature, pressure and the
gas composition of the vapour space all
have an effect on the dielectric constant
of the propagation medium through
which the microwaves must travel.
This in turn affects the propagation
speed or running time of the instrument.
18
The dielectric constant or relative
permittivity can be calculated as
follows :
εr = 1 + (εrN - 1) x θN x P
θ x PN
[Eq. 2.4]
εr
εrN
calculated dielectric constant
(relative permittivity)
dielectric constant of gas/vapour
under normal conditions
(temperature 273 K, pressure 1 bar
absolute)
θN
PN
θ
P
temperature under normal
conditions, 273 Kelvin
pressure under normal
conditions, 1 bar absolute
process temperature in Kelvin
process pressure in bar absolute](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-24-320.jpg)




![2. Physics of radar
W1
Transmitted power:
W2
Reflected power:
Dielectric constant:
εr
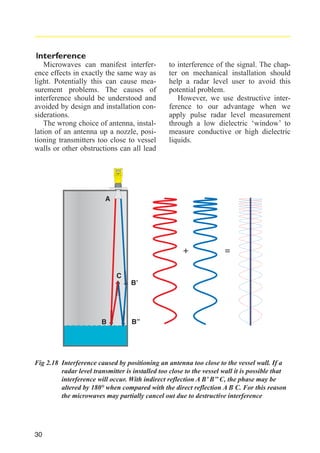
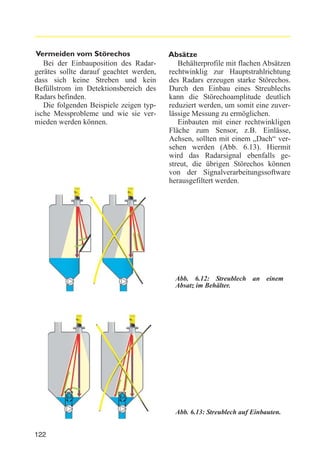
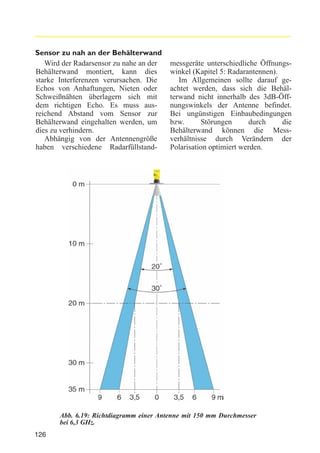
Then the percentage of reflected
power at the dielectric layer,
Π = 1-
4 x εr
(1 + ε )
2
r
W2
Π =
[Eq. 2.5]
W1
Typical examples are as follows:
Acetone
Solvent with a dielectric constant,
εr = 20
Toluene
Solvent with a low dielectric consta t
n,
εr = 2.4
Π = 1-
(2.4)
4x
(1 +
Π = 1-
2
(2.4))
4.46% power is reflected
4x
(1 +
( 20 )
(20)
2
)
40 % power is reflected
Π x 100% power reflected
100
80
60
40
20
0
0
10
20
30
40
50
60
70
80
Dielectric constant, εr
Fig 2.7 Reflected radar power depends upon the dielectric constant of the product
being measured
23](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-29-320.jpg)





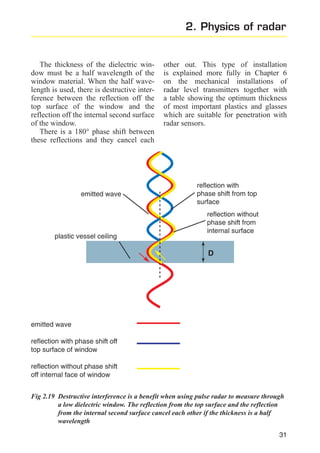

![In Fig 3.1, the aircraft is travelling
towards the CW radar. Therefore the
received frequency is higher than
the transmitted frequency and the sign
of fdp is positive. If the aircraft was
travelling away from the radar at the
v =
λ x fdp
2
=
same speed, the received frequency
would be ft - fdp.
The velocity of the target in the
direction of the radar is calculated by
equation 3.1
c x fdp
c
v
ft
2 x ft
fdp
[Eq. 3.1]
ft+fdp
is the velocity of microwaves
is the target velocity
is the frequency of the
transmitted signal
is the doppler beat frequency
which is proportional to velocity
is received frequency. The sign
of fdp depends upon whether the
target is closing or receding
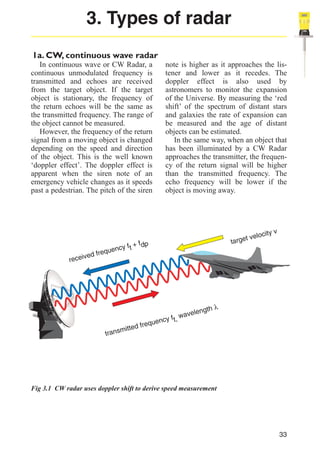
1b. CW wave-interference radar or bistatic CW radar
We have already mentioned that CW
radar was used in early radar detection
experiments such as the famous
Daventry experiment carried out by
Robert Watson - Watt and his colleagues. In this case, the transmitter
and receiver were separated by a considerable distance. A moving object
was detected by the receiver because
there was interference between the fre-
quency received directly from the
transmitter and the doppler shifted frequency reflected off the target object.
Although the presence of the object is
detected, the position and speed cannot
be calculated.
In essence, this is what happens
when a low flying aircraft interferes
with the picture on a television screen.
See Fig 3.2.
1c. Multiple frequency CW radar
Standard continuous wave radar is
used for speed measurement and, as
already explained, the distance to a stationary object can not be calculated.
However, there will be a phase shift
between the transmitted signal and the
return signal.
If the starting position of the object
is known, CW radar could be used to
detect a change in position of up to half
wavelength (λ/2) of the transmitted
wave by measuring the phase shift of
the echo signal. Although further
movement could be detected, the range
34
would be ambiguous. With microwave
frequencies this means that the useful
measuring range would be very limited.
If the phase shifts of two slightly
different CW frequencies are measured
the unambiguous range is equal to the
half wavelength (λ/2) of the difference
frequency. This provides a usable distance measurement device.
However, this technique is limited to
measurement of a single target.
Applications include surveying and
automobile obstacle detection.](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-40-320.jpg)
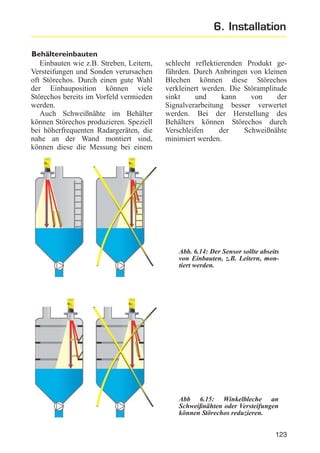
![2.
FM-CW, frequency modulated continuous wave radar
If the distance to the target is R,
and c is the speed of light, then the
time taken for the return journey is:-
2xR
c
∆t =
[Eq. 3.2]
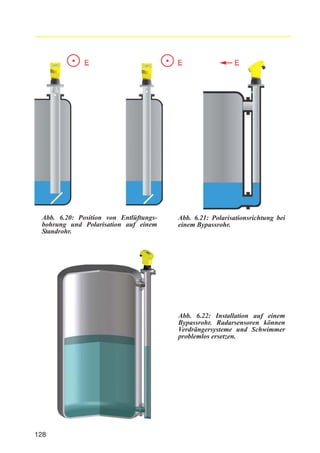
We can see from Fig. 3.3 that if
we know the linear rate of change of
the transmitted signal and measure the
difference between the transmitted and
received frequency fd, then we can
calculate the time ∆t and hence derive
the distance R.
frequency
Single frequency CW radar cannot
be used for distance measurement
because there is no time reference mark
to gauge the delay in the return echo
from the target. A time reference mark
can be achieved by modulating the frequency in a known manner.
If we consider the frequency of the
transmitted signal ramping up in a
linear fashion, the difference between
the transmitting frequency and the
frequency of the returned signal will be
proportional to the distance to the
target.
cy
en
u
eq
r
df
itte
m
ns
tra
re
∆t
fd
c
e
eiv
df
re
e
qu
nc
y
∆t =
2xR
c
time
Fig 3.3 The principle of FM - CW radar
36](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-42-320.jpg)


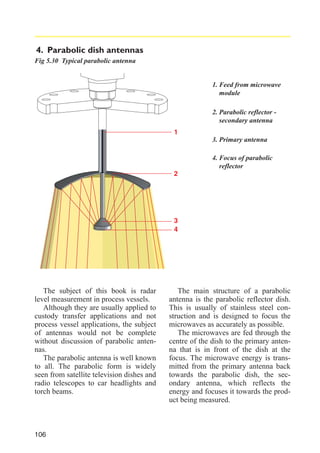
![3. Types of radar
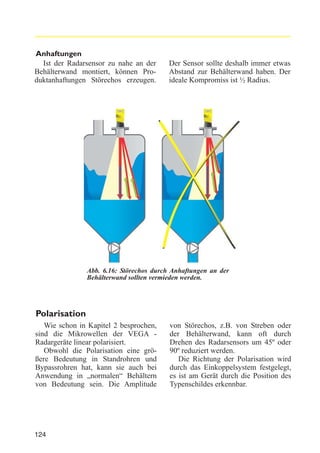
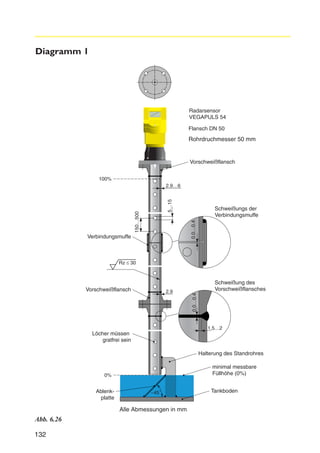
3. Pulse radar
a. Basic pulse radar
Pulse radar is and has been used
widely for distance measurement since
the very beginnings of radar technology. The basic form of pulse radar is a
pure time of flight measurement. Short
pulses, typically of millisecond or
nansecond duration, are transmitted
and the transit time to and from the target is measured.
The pulses of a pulse radar are not
discrete monopulses with a single peak
of electromagnetic energy, but are in
fact a short wave packet. The number
of waves and length of the pulse
depends upon the pulse duration and
the carrier frequency that is used.
These regularly repeating pulses
have a relatively long time delay
between them to allow the return echo
to be received before the next pulse is
transmitted.
t
τ
3rd pulse
2nd pulse
1st pulse
Transmitted pulses
Fig 3.9 Basic pulse radar
The inter pulse period (the time
between successive pulses) t is the
inverse of the pulse repetition
frequency fr or PRF. The pulse duration
or pulse width, τ, is a fraction of the
inter pulse period.
The inter pulse period t effectively
defines the maximum range of the
radar.
Example
The pulse repetition frequency
(PRF) is defined as
fr =
1
t
If the pulse period t is 500 microseconds, then the pulse repetition frequency is two thousand pulses per second.
In 500 microseconds, the radar pulses
will travel 150 kilometres. Considering
the return journey of an echo reflected
off a target, this gives a maximum theoretical range of 75 kilometres.
If the time taken for the return
journey is T, and c is the speed of light,
then the distance to the target is
R=
Txc
2
[Eq. 3.3]
39](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-45-320.jpg)
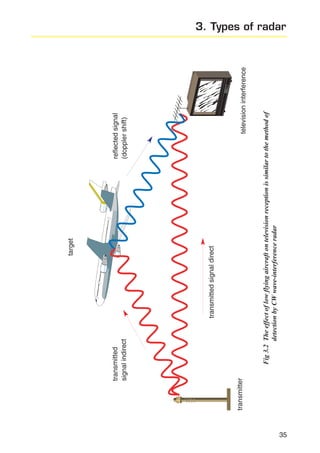
![b. Pulse doppler radar
The pulses transmitted by a standard
pulse radar can be considered as a very
short burst of continuous wave radar.
There is a single frequency with no
modulation on the signal for the duration of the pulse.
If the frequency of the waves of the
transmitted pulse is ft and the target is
moving towards the radar with velocity
v, then, as with the CW radar already
described, the frequency of the return
pulse will be ft + fdp , where fdp is the
doppler beat frequency. Similarly, the
received frequency will be ft - fdp if the
target is moving away from the radar.
Therefore, a pulse doppler radar can
be used to measure speed, distance and
direction.
The ability of the pulse doppler
radar to measure speed allows the system to ignore stationary targets. This is
also commonly called ‘moving target
indication’ or MTI radar.
In general, an MTI radar has accurate range measurement but imprecise
speed measurement, whereas a pulse
doppler radar has accurate speed measurement and imprecise distance measurement.
40
The velocity of the target in the
direction of the radar is calculated in
equation 3.4:
c =
c x fdp
λ x fdp
=
2 x ft
2
[Eq. 3.4]
This is the same calculation as for
CW radar. The distance to the target is
calculated by the transit time of the
pulse, equation 3.3.
R =
Txc
2
[Eq. 3.3]
As well as being used to monitor
civil and military aircraft movements,
pulse doppler radar is used in weather
forecasting. A doppler shift is measured
within storm clouds which can be distinguished from general ground clutter. It is also used to measure the
extreme wind velocities within a tornado or ‘twister’.](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-46-320.jpg)





















![radar_applied_to_level_rb.qxd
15.01.2007
18:46
FM-CW radar bandwidth
The bandwidth of an FM - CW radar is
the difference between the start and
finish frequency of the linear frequency
modulation sweep.
Unlike pulse radar, the amplitude of the
FM - CW signal is constant across the
range of frequencies.
Seite 70
A wider bandwidth produces narrower
difference frequency ranges for each
echo on the frequency spectrum. This
leads to better range resolution in the
same way as with shorter duration pulses with pulse radar.
This is explained in the following diagrams and equations.
frequency
fd =
∆F x 2R
Ts x c
fd
∆F
Ts
R
fd
c
∆F
[Eq. 4.1]
bandwidth
sweep time
distance
difference frequency
speed of light
time
Ts
Fast Fourier Transform
The FAST FOURIER
TRANSFORM produces a
frequency spectrum of all echoes
such as that at fd.
There is an ambiguity ∆fd for each
echo fd.
amplitude
fd
∆fd =
2
Ts
[Eq. 4.2]
∆fd
70
frequency](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-75-320.jpg)
![radar_applied_to_level_rb.qxd
15.01.2007
18:46
Seite 71
4. Radar level measurement
The ambiguity of the distance R,
is ∆ R
∆fd
fd
∆R
R
=
2
Ts
∆F x 2 R
Ts x c
∆R
R
=
c
∆F x R
∆R
R
∆R
=
=
c
∆F
∆R
R
amplitude
distance
Fig 4.24 to 4.26 - FM - CW range resolution
[Eq. 4.3]
From equation 4.3, it can be seen
that with an FM - CW radar the range
resolution ∆R is equal to:-
c
∆F
Therefore, the wider the bandwidth, the
better the range resolution.
Examples:
A linear sweep of 2 GHz has a range
resolution of 150 mm whereas a 1 GHz
bandwidth has a range resolution of
300 mm.
In process radar applications, each
echo on the frequency spectrum is
processed with an envelope curve. The
above equations (Equations 4.1 to 4.3)
show that the Fast Fourier Transforms
(FFTs) in process radar applications do
not produce a single discrete difference
frequency for each echo in the vessel.
Instead they produce a difference frequency range ∆fd for each echo within
an envelope curve. This translates into
range ambiguity.
71](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-76-320.jpg)






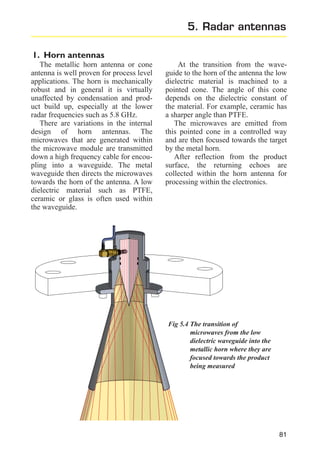
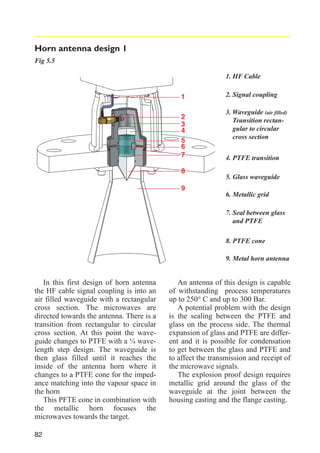
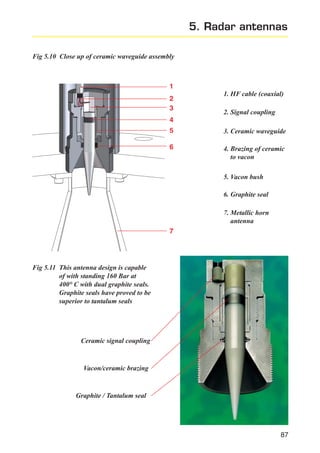
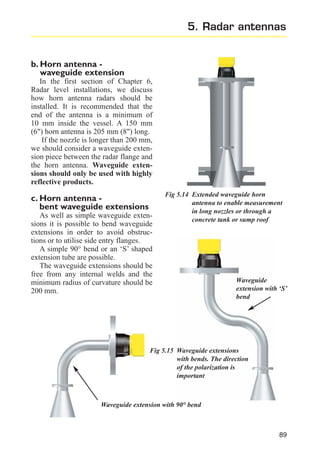
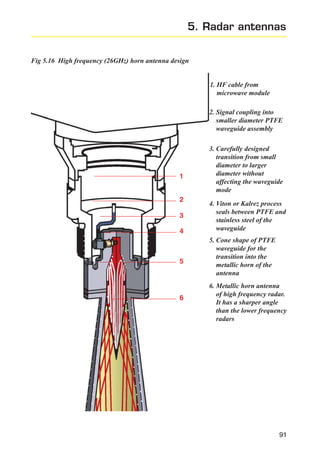
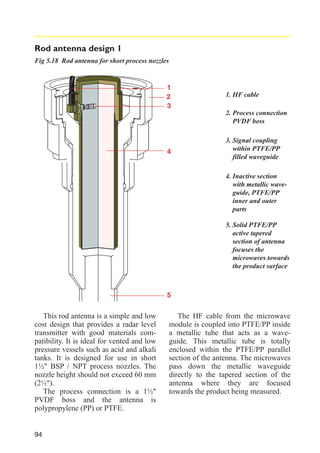
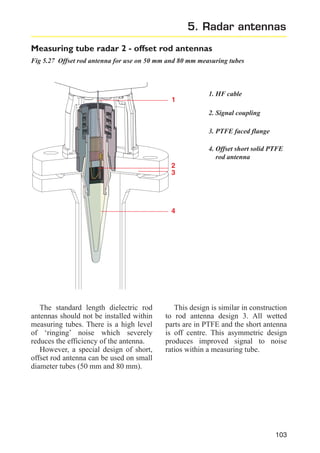
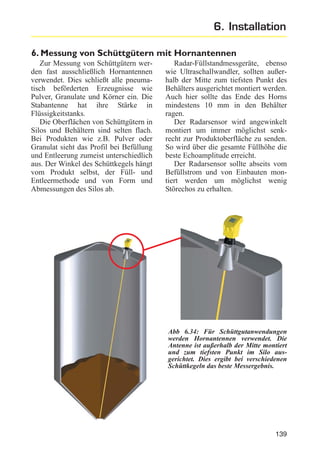
![5. Radar antennas
A measure of how well the antenna
is directing the microwave energy is
called the ‘antenna gain’.
Antenna gain is a ratio between the
power per unit of solid angle radiated
by the antenna in a specific direction to
the power per unit of solid angle if the
total power was radiated isotropically,
that is to say, equally in all directions.
isotropic power
directional power
Isotropic equivalent with total power
radiating equally in all directions
Directional power from antenna
Fig 5.2 Illustration of antenna gain
Antenna gain ‘G’ can be calculated as follows:
G = ηx
(
πxD
λ
2
)
= ηx
4π x A
λ2
[Eq. 5.1]
Where
The aperture efficiencies of radar
level antennas are typically between
η = 0.6 and η = 0.8.
D = antenna diameter.*
It is clear from equation 5.1 that
the directivity improves in proportion
A = antenna area.*
to the antenna area. At a given freλ = microwave wavelength * quency, a larger antenna has a narrower beam angle
η = aperture efficiency
* must be same units
79](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-84-320.jpg)
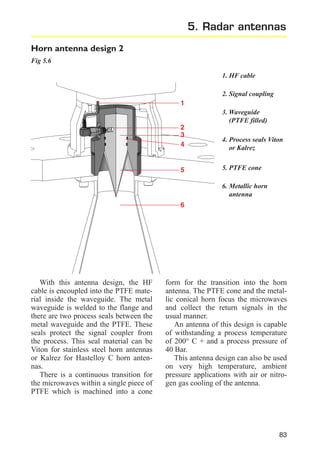
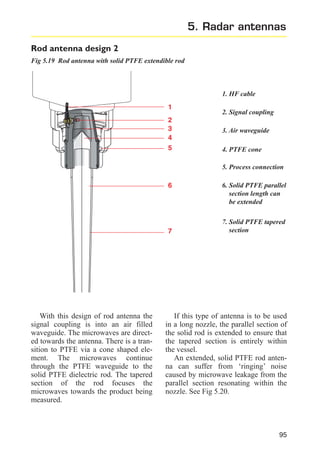
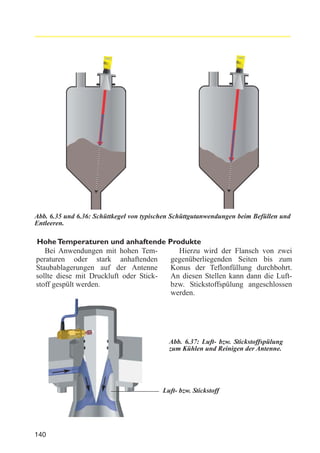
![Also, we can see that the antenna
gain and hence directivity is inversely
proportional to the square of the wavelength.
For a given size of antenna the beam
angle will become narrower at higher
frequencies (shorter wavelengths). For
example the beam angle of a 5.8 GHz
radar with a 200 mm (8") horn antenna
is almost equivalent to a 26 GHz radar
with a 50 mm (2") horn antenna. This
Beam angle
φ
=
means that a 26 GHz antenna is lighter
and easier to install for the same beam
angle. However, as discussed in
Chapter 4, this is not the whole story
when choosing the right transmitter for
an application.
For a standard horn antenna the
beam angle φ, that is the angle to the
minus 3 dB position, can be calculated
using equation 5.2.
70° x
λ
D
[Eq. 5.2]
The following graph shows horn antenna diameter versus beam angle for the
most common radar frequencies,
5.8 GHz, 10 GHz and 26 GHz.
Antenna beam angles (diameter / frequency)
beam angle in degrees (-3dB)
80
5.8 GHz
10 GHz
60
26 GHz
40
20
0
50
75
100
125
150
175
200
225
250
antenna diameter, mm
Fig 5.3 Graph showing relation between horn antenna diameter and beam angle for
5.8 GHz, 10Ghz and 26GHz radar
80](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-85-320.jpg)
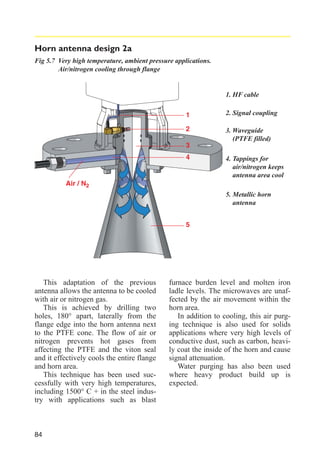




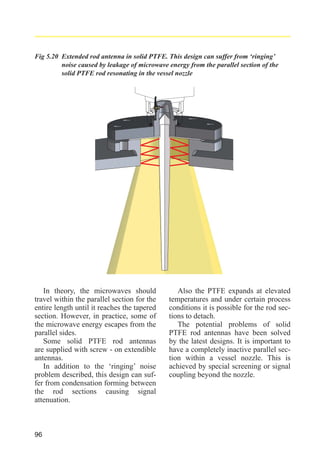





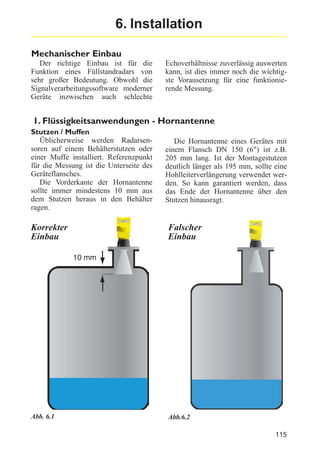
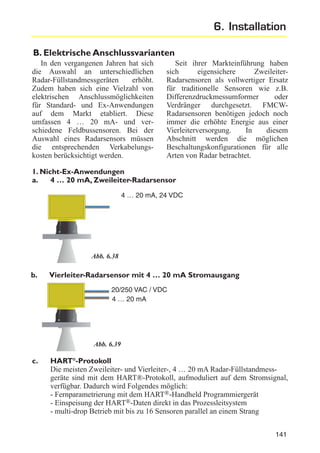
![Microwave velocity within measuring tube
The speed of microwaves within a
measuring tube is apparently slower
when compared to the velocity in free
space. The degree to which the running
time slows down depends on the diameter of the tube and the wavelength of
the signal.
cwg = co x
{
1-
2
}
λ
( 1.71d )2
[Eq. 5.3]
The microwaves bounce off the
sides of the tube and small currents are
induced in the walls of the tube. For a
circular tube, or waveguide, the
velocity change is calculated by the
following equation :
cwg
co
λ
d
is the speed of microwaves in
the measuring tube / waveguide
is the speed of light in free
space
is the wavelength of the
microwaves
is the diameter of the measuring tube
Fig 5.28 The transit time of microwaves
is slower within a stilling tube.
This effect must be compensated
within the software of the radar
level transmitter
104](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-109-320.jpg)
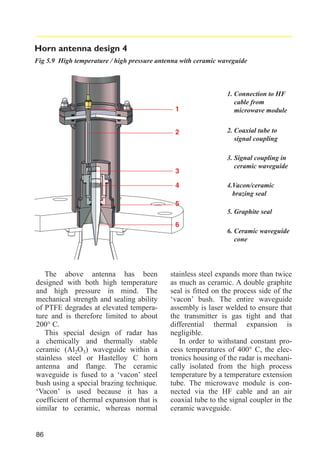
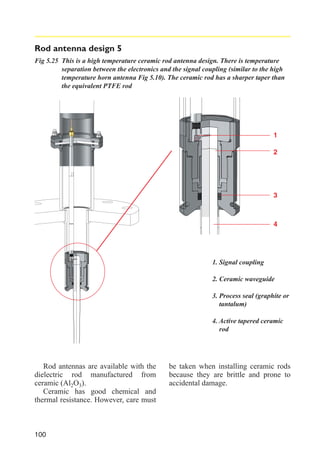
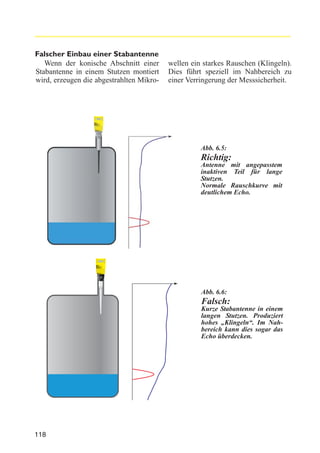
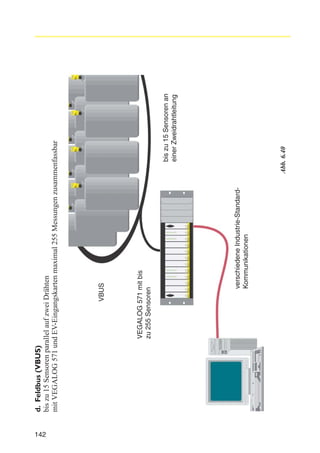
![5. Radar antennas
There are different modes of propagation of microwaves within a waveguide. However, an important value is
the minimum diameter of pipe that will
allow microwave propagation.
The value of the critical diameter,
dc , depends upon the wavelength λ of
the microwaves: The higher the frequency of the microwaves, the smaller
the minimum diameter of measuring
tube that can be used.
dc =
Equation 5.4 shows the relationship
between critical diameter and wavelength. For example, 5.8 GHz has a
wavelength λ of ~ 52 mm. The minimum theoretical tube diameter is
dc = 31 mm
With a frequency of 26 GHz, a
wavelength of 11.5 mm, the minimum
tube diameter is dc = 6.75 mm. In practice the diameter should be higher. The
diameter for 5.8 GHz should be at least
40 mm.
λ
1.71
[Eq. 5.4]
% speed of light, c
100
80
60
40
20
0
0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8 3.0
Tube diameter / wavelength, d / λ
Fig 5.29 Graph showing the effect of measuring tube diameter on the propagation speed
of microwaves
Higher frequencies such as 26 GHz
will be more focused within larger
diameter stilling tubes. This will minimise false echoes from the stilling tube
wall.
The installation requirements of
radar level transmitters in measuring
tubes are covered in the next chapter.
105](https://image.slidesharecdn.com/vega-radarbook-140212093820-phpapp02/85/Vega-radar-book-110-320.jpg)




















The history of radar began in the late 19th century with Maxwell's theory of electromagnetism and Hertz's experiments verifying the existence of radio waves that could reflect off objects. Early pioneers included Hülsmeyer who invented the first radar system in 1904 and Marconi who recognized its potential for ship detection. During the 1930s, radar was independently developed by several countries including the US, UK, Germany and others. The UK played a key role with Watson-Watt demonstrating radar detection of aircraft at Daventry in 1935. This led to the development of pulse radar and the Chain Home radar network which helped defend Britain in WWII. Germany also made major advances with naval and airborne radar including the Freya,




















































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)













