Selector Laika: Planta automatitzada classificadora d'objectes segons la seva grandària
•Download as PPS, PDF•
0 likes•2,018 views

Laura Icart

Recommended
Recommended
More Related Content
More from Marcel Jorba
Recently uploaded
Recently uploaded (8)
Selector Laika: Planta automatitzada classificadora d'objectes segons la seva grandària
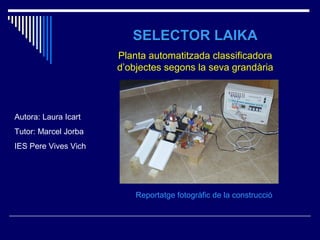
- 1. SELECTOR LAIKASELECTOR LAIKA Planta automatitzada classificadora d’objectes segons la seva grandària Reportatge fotogràfic de la construcció Autora: Laura Icart Tutor: Marcel Jorba IES Pere Vives Vich
- 2. Serrem les barres de fusta que faran de corrons Preparem els topalls Preparem el torn per foradar els corrons Foradem els corrons pel mig per posar-hi els eixos
- 3. Hi enganxem els topalls i els eixos i provem si han quedat bé Recoberts amb paper de vidre tindran més adherència amb la cinta transportadora
- 4. Utilitzarem perfil quadrat d’alumini per fer les guies de les tiges Un cop serrat convenientment, això es comença a assemblar a una guia... Trepant-la i doblegant els extrems podrem ancorar-la a la base Ara hi posem uns escaires d’acer que ens faran de suports
- 5. Muntem els suports de les tiges i les guies La distribució en planta té bona pinta
- 6. Preparem les tiges amb llistons quadrats i cremalleres de plàstic per arrossegar-les Les tiges encaixen perfectament dins les guies d’alumini que hem preparat abans
- 7. Trepem la fusta base per serrar els forats per als sistema de tensatge Serrem els forats Collem amb visos una platina d’acer A la platina hi collarem els suports d’un dels corrons
- 8. Així podrem tibar el corró si la cinta es destensa Tal com veiem, el corró es pot tibar enrere
- 9. Utilitzarem una càmera d’un pneumàtic de camió per fer les cintes transportadores Així quedaven, però al final vam haver d’utilitzar pell per culpa de l’asimetria... També preparem els topalls per als eixos dels corrons. Trepar metall és perillós: cal protegir-se
- 10. Construïm les torres que allotjaran els fins de cursa de les tiges i les rodes dentades per arrossegar-les Cal garantir que les tiges premin els interruptors de fi de cursa quan arribin al final del recorregut Sembla que la planta va agafant forma...
- 12. Amb la termoconformadora al buit de plàstics fem suports a mida per als motors Un cop tallats i trepats, el resultat és aquest. Posteriorment, però vam haver de substituir dos dels quatre motors i posar-ne uns de reciclats d’aparells de vídeo vells, que eren més potents.
- 13. Fem el disseny elèctric/electrònic de la interfície amb l’autòmat. L’esquema no és gaire complicat A partir de l’esquema, dissenyem la placa de circuit imprès on hauran d’anar tots els components Ja està!
- 14. Dibuixem les pistes sobre una placa verge de circuit imprès Ja està a punt! La submergim en una solució de clorur fèrric perquè elimini el coure sobrant
- 15. Aprofitarem components de plaques d’ordinador de desguàs Reparem algunes pistes que no han quedat prou bé... En realitat, al final vam optar per repetir la placa La placa d’interfície amb tots els components soldats Tots els connectors han estat obtinguts de la deixalleria. És més barat que comprar-los.
- 16. I aquest és el resultat final del projecte un cop connectada la planta a la interfície, i aquesta a l’autòmat. Naturalment, també hem hagut d’escriure el programa de control per a l’autòmat.
- 17. FIFI