1. Il progetto Duckietown nasce come corso per gli studenti del MIT per l’insegnamento dei fondamenti della programmazione
dei veicoli a guida autonoma. L'Istituto di tecnologia del Massachusetts (in inglese: Massachusetts Institute of Technology,
MIT) è una delle più importanti università di ricerca del mondo con sede a Cambridge, nel Massachusetts (Stati Uniti),
ideatrice del progetto Duckietown. Il progetto del MIT destinato agli studenti universitari, è nato nella primavera 2016 come
applicazione pratica, con l’obiettivo di realizzare un sistema di trasporto basato su veicoli robot in grado di circolare in
autonomia all’interno di una città in miniatura. Ne è nata quindi una piattaforma aperta, flessibile ed economica liberamente
adottabile per l’insegnamento e la ricerca sui sistemi autonomi. I pilastri su cui si basa il progetto sono due:
I Duckiebot, piccoli veicoli autonomi costruiti con componenti assemblabili, il cui costo totale dev’essere al massimo di 100
dollari.
La Duckietown, la città in miniatura completa di strade, segnaletica, semafori, ostacoli e abitanti (le anatre) che hanno
bisogno di mezzi di trasporto.
Nel progetto universitario, i Duckiebot utilizzano una sola telecamera per percepire l’ambiente esterno ed una Raspberri Pi 2
per eseguire l’elaborazione dei dati. L’utilizzo della visione artificiale guida ogni robot nell’esecuzione delle azioni
fondamentali per la navigazione: seguire le corsie della città; riconoscere i semafori agli incroci; evitare gli ostacoli, i pedoni (le
anatre) e altri Duckiebot; localizzarsi all’interno della mappa cittadina; coordinarsi con altri Duckiebot per evitare collisioni. La
costruzione della città in miniatura è organizzata in modo da seguire regole ben precise per la realizzazione delle linee di
demarcazione delle carreggiate, della linea di mezzeria, per gli incroci ed il posizionamento dei semafori. La gestione del
traffico deve inoltre seguire le norme del codice della strada. Grazie all’apporto dell’ing. Mauro D’Angelo, fondatore
dell’associazione no profit “Perlatecnica” è nata la versione del progetto destinata alle scuole supriori, “DuckietownHS” (hight
school) il cui obbiettivo è quello di favorire il progresso della ricerca fondamentale caratteristica del progetto universitario
grazie all’aiuto degli studenti delle scuole superiori italiane fornendo a quest’ultimi un primo approccio verso il mondo della
programmazione robotica. La navigazione autonoma dei robot del progetto DuckietownHS, non si basa sull’utilizzo di una
telecamera ma su una serie di sensori di diverso tipo:
dei sensori ad infrarossi gli permettono di seguire i limiti della carreggiata;
un sensore di colore permette di riconoscere il colore del semaforo costituito da led RGB;
dei sensori laser ad infrarossi gli consentono di rilevare la presenza di ostacoli o altri robot sulla carreggiata;
un modulo bluetooth o WIFI gli consente di comunicare le proprie informazioni di stato alla città.
L’elettronica di bordo dei Duckiebot HS è strutturata in maniera modulare ed è basata su delle schede della
STMicroelectronics:
una scheda NUCLEO-F401RE, utilizzata per il controllo generale del robot;
una Shield per il controllo dei due motori;
una Shield con accelerometro, giroscopio, bussola ed altimetro;
una Shield con dei sensori di prossimità laser.
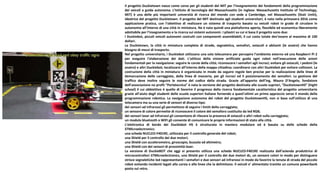
La versione di DuckieBOT che oggi vi presento utilizza una scheda NUCLEO-F401RE realizzata dall’azienda produttrice di
microcontrollori STMicroelectronics, uno Shield per il controllo dei due motori dc, un sensore colori in modo per distinguere
strisce segnaletiche led rappresentanti i semafori e due sensori ad infrarossi in modo da favorire la tenuta di strada del piccolo
robot evitando incidenti legati alla corsia e alle linee che la delimitano. Il veicoli e’ alimentato tramite un comune powerbank
posto sul retro.