Sensörler ve transdüserler sunumu araştırma dosyası
•Download as DOCX, PDF•
0 likes•2,712 views

Sensörler ve transdüserler sunumu araştırma dosyası & Kazım Anıl AYDIN | Ordu - 2012 | sensörler, transdüserler, sensör çeşitleri, sensörlerin sınıflandırılması, transdüserlerin sınıflandırılması, transdüser çeşitleri

Recommended
Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (10)
Similar to Sensörler ve transdüserler sunumu araştırma dosyası
Similar to Sensörler ve transdüserler sunumu araştırma dosyası (20)
Sensörler ve transdüserler sunumu araştırma dosyası
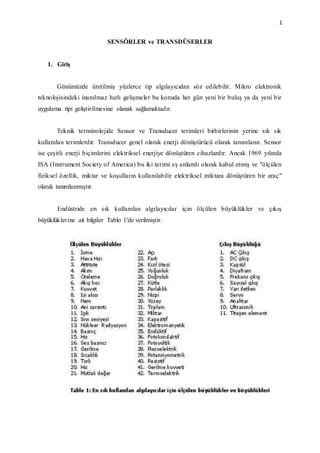
- 1. 1 SENSÖRLER ve TRANSDÜSERLER 1. Giriş Günümüzde üretilmiş yüzlerce tip algılayıcıdan söz edilebilir. Mikro elektronik teknolojisindeki inanılmaz hızlı gelişmeler bu konuda her gün yeni bir buluş ya da yeni bir uygulama tipi geliştirilmesine olanak sağlamaktadır. Teknik terminolojide Sensor ve Transducer terimleri birbirlerinin yerine sık sık kullanılan terimlerdir. Transducer genel olarak enerji dönüştürücü olarak tanımlanır. Sensor ise çeşitli enerji biçimlerini elektriksel enerjiye dönüştüren cihazlardır. Ancak 1969 yılında ISA (Instrument Society of America) bu iki terimi eş anlamlı olarak kabul etmiş ve "ölçülen fiziksel özellik, miktar ve koşulların kullanılabilir elektriksel miktara dönüştüren bir araç" olarak tanımlanmıştır. Endüstride en sık kullanılan algılayıcılar için ölçülen büyüklükler ve çıkış büyüklüklerine ait bilgiler Tablo 1'de verilmiştir.
- 2. 2 2. Sensör ve Transdüser Nedir? Sensör = Algılayıcılar ("duyarga" da denmektedir) fiziksel ortam ile endüstriyel amaçlı elektrik/elektronik cihazları birbirine bağlayan bir köprü görevi görürler. Bu cihazlar endüstriyel proses sürecinde kontrol , koruma ve görüntüleme gibi çok geniş bir kullanım alanına sahiptirler. Transdüser = Fiziksel ortam değişikliklerini (ısı, ışık, basınç, ses, vb.) algılayan elemanlara “sensör”, algıladığı bilgiyi elektrik enerjisine çeviren elemanlara transdüser denir. Transdüserler, teknolojinin gelişmesiyle birlikte birçok iş makinasının kumandasında ,kapıların otomatik açılıp kapatılmasında ,bir çok aygıtın istenildiği zaman devreye sokulup çıkartılmasında gibi bir çok yerde transdüserlerkullanılırlar.Bu sayede hem günlük hayatımızı hem de endüstriyel üretim süreçlerini çok daha kolaylaştırmış oluruz. Biz bu modül de hep birlikte başlıca sensör ve transdüserleri tanıyarak kullanım alanlarını göreceğiz. 3. Sensörlerin Sınıflandırılması Algılayıcıları birbirinden farklı birçok sınıfa ayırmak mümkün. Ölçülen büyüklüğe göre, çıkış büyüklüğüne göre, besleme ihtiyacına göre vb… Aşağıda bu sınıflardan bazılarına değinilecektir. 3.1 Giriş Büyüklüklerine Göre Algılayıcılarla ölçülen büyüklükler 6 gruba ayrılabilir. Bunlar; 1. Mekanik : Uzunluk, alan, miktar, kütlesel akış, kuvvet, tork (moment), basınç, hız, ivme, pozisyon, ses dalgaboyu ve yoğunluğu 2. Termal : Sıcaklık, ısı akışı 3. Elektriksel : Voltaj, akım, direnç, endüktans, kapasitans, dielektrik katsayısı, polarizasyon, elektrik alanı ve frekans 4. Manyetik : Alan yoğunluğu, akı yoğunlugu, manyetik moment, geçirgenlik 5. Işıma : Yoğunluk, dalgaboyu, polarizasyon, faz, yansıtma, gönderme 6. Kimyasal : Yoğunlaşma, içerik, oksidasyon/redaksiyon, reaksiyon hızı, pH miktarı
- 3. 3 3.2 Çıkış Büyüklüklerine Göre Öte yandan analog çıkışlara alternatif olan dijital çıkışlar ise bilgisayarlarla doğrudan iletişim kurabilirler. Bu iletişimler kurulurken belli bazı protokoller kullanılır. Bunlardan seri iletişim protokollerine, aşağıda kısaca değinilmiştir. RS232C: Bu protokol başlangıçta telefon veri iletişimi için tasarlanmıştır. Daha sonra birçok bilgisayar sistemi bunu sıkça kullanmaya başlamış ve sonuçta RS232 standart bir iletişim protokolu haline gelmiştir. RS232C'nin çalışması tek sonlamalıdır(single ended). Lojik 1 = -15,-3 arasında ve lojik 0 = +3,+15 arasındadır. Algılayıcılar verileri bitler halinde ve seri iletişim protokoluna uygun olarak bilgisayara gönderir. RS232C bir single ended arayüze olduğundan alıcı ve gönderici arasındaki uzaklık dış çevreden gelen olumsuz faktörlerin (EMI,RFI enterferanslar) azaltılması açısından kısa tutulmalıdır. RS422A : Bu protokol Differantial ended bir arayüze sahiptir. Alıcı verici arasındaki uzaklık yeterince en uzak seviyededir. Hatlarda bu mesafe sebebiyle olabilecek zayıflama 200mV seviyesine kadar azalsa da sistem iletişime devam eder. Diferansiyel ara birim sayesinde sinyaldeki zayıflama ihmal edilebilir düzeye çekilir ve oldukça yüksek bir veri hızıyla haberleşme sağlanabilir. Algılayıcı ve bilgisayar arasındaki iletişimde Twisted Pair (Bükülmüş kablo) kullanıldığından dış etkilerden etkileşim azdır. RS485 : Standart 422A protokolu genişletilerek oluşturulmuş bir protokoldür. Bu protokol ile birlikte çalışabilen 32 adet alıcı vericinin tek bir kabloyla veri iletişimi sağlanabilir. RS485 protokolü kablodaki iletişim problemlerini ortadan kaldırmaktadır. 3.3 Besleme İhtiyacına Göre Algılayıcılar besleme ihtiyacına göre iki sınıfa ayrılabilir. Bunlar ; 3.3.1 Pasif Algılayıcılar Hiçbir şekilde dışardan harici enerji almadan (besleme gerilimine ihtiyaç duymadan) fiziksel ya da kimyasal değerleri bir başka büyüklüğe çevirirler. Bu algılayıcı tipine örnek
- 4. 4 olarak Termocouple (T/C) ya da anahtar gösterilebilir. T/C aşağıda etraflıca anlatılacaktır. Anahtar ise bilindiği gibi mekanik bir hareketi elektriksel bir kontağa dönüştürmektedir. 3.3.2 Aktif Algılayıcılar Çalışmaları için harici bir enerji beslenmesine ihtiyaç duyarlar. Bu algılayıcılar tipik olarak zayıf sinyalleri ölçmek için kullanılırlar. Aktif algılayıcılarda dikkat edilmesi gereken nokta giriş ve çıkışlardır. Bu tip algılayıcılar dijital ya da analog formatta elektriksel çıkış sinyali üretirler. Analog çıkışlılarda, çıkış büyüklüğü gerilim ya da akımdır. Gerilim çıkışı genellikle 0-5V aralığında oldukça yaygın kullanılmaktadır. Ancak 4-20mA akım çıkışı da artık endüstride standart haline gelmiştir. Bazı durumlarda 0-20mA akım çevrimi kullanılmaktadır Ancak endüstride çoğu zaman hatlarda meydana gelen bozulma kopma gibi durumlarda sistemin bu durumu kolay algılaması ve veri iletişiminin sağlıklı yapılabilmesi için 4-20mA daha yaygın kullanılır. Çok eski algılayıcılar 10-50 mA akım çıkışlarına sahiptirler. Endüstride en yaygın kullanılan 4-20 mA çevrim tipinin kullanımı bazı özel durumlar gerektirmektedir. Bu noktalar; a) Algılayıcıların yerleştirildiği uzak noktalarda elektrik besleme geriliminin olmaması gereklidir. b) Algılayıcılar gerilim sinyalinin sınırlı olabileceği durumlarda tehlikeli uygulamalarda kullanılmalıdır c) Algılayıcıya giden kablolar iki ile sınırlanmalıdır. d) Akım çevrimsinyali göreceli olarak gürültü geriliminin ani sıçramalarına karşı korumalıdır. Ancak bunu uzun mesafe veri aktarımında yapamaz. e) Algılayıcılar, ölçüm sisteminden elektriksel olarak izole edilmelidir. 3.4 Algılama Şekillerine Göre 3.4.1.1 Temaslı Algılayıcılar Sensörün algıladığı cisme temas etmesi ile gerçekleşen değişimin algılanmasıdır. Temas eylemi genelde mekaniktir.
- 5. 5 3.4.1.2 Temassız Algılayıcılar Ayrık konum büyüklükleri için kullanılan, ya kısaca ifade etmek gerekirse, bir nesnenin belirlenen bir konumda bulunup, bulunmadığını saptayan algılayıcılardır. Bu algılayıcılar temassız algılayıcı adı altında gösterilmektedir. Nesnenin konumunu belirleyen ya da belirleyemeyen bu algılayıcılar, duruma göre ya “evet” ya da “hayır” şeklinde bir uyarı verirler. Bu tip, yani sadece iki durumu bildiren algılayıcılar ikili algılayıcı ya da seyrek de olsa initiyatör şeklinde gösterilir. Birçok üretim donanımında belirlenen hareketlerin geri besleme işareti için mekanik konum anahtarları kullanılır. Bu anahtarların diğer gösterim şekilleri mikro anahtar, sınır anahtarı ya da limit valfidir. Burada hareket temas edilerek algılanır ve daha önceden tasarlanan şartlar bu şekilde yerine getirilir. Ayrıca bu anahtarlar aşınmaya karşı dayanıklıdır. Temassız algılayıcılar bu anahtarlardan farklı olarak elektroniksel ve temassız çalışır. Temassız algılayıcıların getirdiği avantajlar şunlardır: Geometrik konumların hassas ve otomatik olarak saptanması Nesnelerin ve hareketlerin temassız olarak saptanması; elektronik temassız algılayıcının yardımıyla iş parçası ve algılayıcı arasında kontak kurulması gerekmez Anahtarlama hızlılığı – algılayıcılar elektronik çıkış sinyallerinin yardımıyla gerilim tepe değerleri ve hata impulsları üretmez. Aşınmaya dayanımlı fonksiyon – elektronik algılayıcılar hareketlilikten dolayı aşınan parçalar içermez Sınırsız sayıdaki anahtarlama çevrimleri Ağır çevre koşullarında da kullanılabilen tasarımlar mevcuttur (örneğin patlama tehlikesi bulunan ortamlar). Bu sebeplerden dolayı, temassız algılayıcılar endüstrinin birçok kolunda kullanılmaktadır.Temassız algılayıcılar teknik birimlerin çalışmalarının kontrol edilmesini
- 6. 6 sağlar. Bu yüzden de prosesin çalışma kontrolünün ve güvenliğinin sağlanması amacı ile kullanılır. Böylece üretim sırasında ortaya çıkan arızalar önceden, hızlı ve güvenli bir şekilde saptanır. İnsan ve makinenin başına gelebilecek zararların önlenmesi, önemli bir görüş noktasıdır. Makinelerin durma süre ve sayılarının azaltılması, arızaları hızlı bir şekildesaptayan ve bildiren algılayıcıları kullanılması ile mümkündür. 4. Sensör Çeşitleri 4.1. Temaslı Sensörler 4.1.1. Mekanik Konum Anahtarları Şekil 1: Örnek bir konum anahtarı Robot çalışmalarında sıklıkla kullanılan touch sensörler aslında basit anahtarlardır. Touch sensör robotun bir cisme temas edip etmediğini ya da sınırlandırılması gereken bir hareketin tamamlanıp tamamlanmadığını algılamak için ( limit switch ) kullanılır. 4.1.2. Basınç Sensörleri Her türlü fiziki kuvvet ve basınç değişimini algılayan ve bu değişimi elektriksel sinyale çeviren elemanlara basınç sensörü denir.
- 7. 7 4.1.2.1. Piezoelektrik Basınç Ölçme Sensörleri Basıncın elektrik akımına dönüştürülme yollarından biri de piezoelektrik olayıdır. Piezoelektrik özellikli algılayıcılarda kuartz (quartz), roşel (rochelle) tuzu, baryum, turmalin gibi kristal yapılı maddeler kullanılır. Bu elemanlar üzerlerine gelen basınca göre küçük değerli bir elektrik gerilimi ve akımı üretir. Bu elektrik akımının değeri basıncın değeri ile doğru orantılıdır. Piezoelektrik özellikli elemanlar hızlı tepki verdiklerinden ani basınç değişikliklerini ölçmede yaygın olarak kullanılır. Şekil 2: Piezoelektrik basınç sensörünün yapısı 4.1.2.2. Load Cell (Yük Hücresi) Basınç Sensörleri Yük hücresi (load cell) daha çok elektronik terazilerin yapımında kullanılan basınç sensörüdür. Asıl çalışma prensibi strain gauge gibidir.
- 8. 8 Şekil3: Load Cell ve iç yapısı 4.1.2.3. Strain Gauge (Şekil Değişikliği) Sensörleri Temel olarak strain gaugeler esneyebilen bir tabaka üzerine ince bir telin veya şeridin çok kuvvetli bir yapıştırıcı ile yapıştırılmasından oluşmuştur. Üzerindeki basıncın etkisinden dolayı tabakanın esnemesi ile birlikte iletken şeridin de gerilerek uzamasına sebep olacaktır.Bu uzama esnasında telin boyu uzayarak kesiti azalacaktır. Bilindiği gibi iletkenlerin kesiti azaldıkça dirençleri artacağından uygulanan kuvvete bağlı olarak iletkenin direncinde değişme olacaktır. Bu direnç değişimine bağlı olarak uygulanan kuvvetin miktarını tespit edilebilir.
- 9. 9 Şekil 4: Strain Gauge 4.1.2.4. Kapasitif Basınç Ölçme Sensörü Kondansatörler yapıları gereği elektrik yükü depolayabilir. Kondansatörlerin yük depolayabilme kapasiteleri ise kondansatör plakalarının boyutlarına, bu plakalar arasındaki mesafenin uzaklığına ve iki plaka arasındaki yalıtkan malzemenin özelliğine bağlıdır. Sonuç olarak kondansatör plakaları birbirinden uzaklaştırılırsa ya da esnetilirse veya ki plaka arasındaki dielektrik malzeme hareket ettirilirse, kondansatörün kapasitesi değişir. Kondansatörün kapasitesi ile beraber alternatif akıma gösterdiği direnç de değişir. İşte bu prensipten hareketle kapasitif basınç sensörleri üretilmiştir. Şekil 5: Kapasitif Basınç Ölçme Sensörünün Yapısı
- 10. 10 4.1.3. Denge ve Eğim Sensörleri (Civalı Sensörler) Bazı otomasyon sistemlerinde ya da robot projelerinde eğimin algılanması gerekebilir. Bu durumlarda eğimi algılayabilmek için içlerinde civa damlacığı ya da metal bilye bulunan eğim sensörleri kullanılır. Bu sensörler bulundukları konuma göre içlerindeki civa damlacığının ya da metal bilyenin sensör içerisindeki anahtarları açması ya da kapamasıyla çalışır. Şekil 6: Civalı Eğim Sensörleri 4.2. Temassız Sensörler 4.2.1. Termal Sensörler Ortamdaki ısı değişimini algılamamıza yarayan cihazlara ısı veya sıcaklık sensörleri denir. Birçok maddenin elektriksel direnci sıcaklıkla değişmektedir. Sıcaklığa karşı hassas olan maddeler kullanılarak sıcaklık kontrolü ve sıcaklık ölçümü yapılır. 4.2.1.1. Dirençsel sıcaklık sensörleri (RTD) Bir metalin direncinin sıcaklık ile artması dirençsel sıcaklık sensörü RTD lerin temelidir. Metal iletkenlerden yapılmış olan elemanların dirençleri sıcaklık ile doğru
- 11. 11 orantılıdır. (PTC). Alaşım ve yarıiletkenlerde ise durum farklıdır. Pek çok yarıiletkenin direnci sıcaklık ile ters orantılıdır. RTD lerin dirençleri ne kadar yüksekse sistemdeki hata payı da o kadar düşük olacaktır. Demir, platin, nikel, 0.7 nikel-0.3 demir ve bakır gibi maddeler RTD imalatında en çok kullanılan maddelerdir. Bu malzemeler içerisinde en doğrusal sonuçları veren ve en ideal olanı platindir. RTD’ler hassas sıcaklık algılayıcılardır. Hassaslık, uzun süreli elektriksel direnç kararlılığı, eleman doğrusallığı ve tekrarlanabilirliği gibi özellikler isteyen uygulamalarda kullanılırlar. Çok geniş bir sıcakılık aralığında ölçüm alabilirler (Bazı platin algılayıcılar -164 C ; +650 C arasında çalışabilir). RTD'lerde bulunan algılama elemanı genellikle bir platin tel sargısı veya seramiğe uygulanmış ince bir metalik tabakadır. Platin RTD'lerin direnç değerleri, tel sarımlı laboratuar RTD'lerinde 10 ohm'dan, ince plakalı RTD'lerde birkaç bin ohm'a kadar değişmektedir. En çok bilinen değer 0°C'ta 100 ohm'dur (PT100). RTD'ler 0 °C'taki direnç değerleri ve kullanılan elemente göre adlandırılmıştır. (PT100, PT1000...). Şekil 7: Örnek Bir RTD 4.2.1.1.1. PTC (Positive Temperature Coefficient) Bulunduğu ortamın veya temas ettiği yüzeyin sıcaklığı arttıkça elektriksel direnci artan devre elemanıdır.
- 12. 12 PTC’ler 60 ºC ile +150 ºC arasındaki sıcaklıklar da kararlı bir şekilde çalışır. Daha çok elektrik motorlarını fazla ısınmaya karşı korumak için tasarlanan devrelerde kullanılır. Şekil 8: Çeşitli PTC ‘ler ve karakteristiği 4.2.1.1.2. NTC (Negative Temperature Coefficient) Bulunduğu ortamın veya temas ettiği yüzeyin sıcaklığı arttıkça elektriksel direnci azalandevre elemanıdır.NTC’ler - 300 Cº ile +50 Cº arasındaki sıcaklıklar da kararlı bir şekilde çalışırlar. Daha çok elektronik termometrelerde, arabaların radyatörlerin de, amplifikatörlerin çıkış güç katlarında, ısı denetimli havyalarda kullanılırlar.
- 13. 13 Şekil 9: Çeşitli NTC ‘ler ve karakteristiği 4.2.1.2. Termistörler Termistörler, RTD ler gibi termistörler de sıcaklığa duyarlıdirençlerdir ancak RTD lerden daha yüksek dirence sahiptirler ve bu daonları daha hassas yapan bir özelliktir. Çünkü yüksek dirençlerindendolayı bağlantı uçlarının dirençlerinden kaynaklanan ölçüm hatasıRTD'lerinkinden çok daha küçük olur. Sonuç olarak termistörler RTD ler ileölçülemeyecek küçük sıcaklık değişimlerini ölçmek için kullanılabilir.
- 14. 14 Şekil 10: Örnek Bir Termistör 4.2.1.3 Isıl Çiftler (thermocouple, termokupl) Yüksek sıcaklıkların ölçülmesinde termometreler kullanılamaz. Termokupllar eksi 200°'den 2320°C' ye kadar çeşitli proseslerde yaygın olarak kullanılır. Termokupullar demir konstantan ve bakır konstantan gibi iki farklı metalin birleşme noktası ısıtıldığında bu iki metal uçları arasında potansiyel bir fark meydana gelir, prensibine göre çalışır. Oluşan potansiyel farkın değeri , iki ayrı metalin ısınma sonucundaki sıcaklık ve soğukluk farkına bağlıdır.İşte oluşan bu potansiyel fark kullanılarak istenilen sıcaklık değerleri ölçülür. (Şekil 11) Şekil 11: Termokuplun yapısı ve çeşitleri
- 15. 15 4.2.1.4. Entegre devre sıcaklık sensörleri Yarı iletken entegre devrelerin gelişmesi ile tümdevre sıcaklık sensörleri ortaya çıkmıştır. Germanyum ve silisyum içerisine karıştırılan kristaller ile üretilen sıcaklık sensörleri kullanılmaktadır. Germanyum kristal malzemelerin dirençleri sıcaklık ile ters orantılıdır. Silisyum kristal malzemelerin dirençleri ise sıcaklıkla doğru orantılıdır. Germanyum silisyum malzemelerin sıcaklık sensörü olarak çalışma mantığı; normal germanyum silisyum PN birleşmeli diyotlarda oluşan nötr bölgenin sıcaklık arttırılarak aşılması sonucu bu bölgeden akım geçmesinin sağlanmasıdır. Sıcaklık arttıkça bu bölgeden geçen akım da artar. Şekil 12: Örnek lm35 ısı sensörü (entegresi) 4.2.2. Manyetik Sensörler 4.2.2.1. ReedSensörü Manyetik temassız algılayıcılar kalıcı mıknatısların ve elektromıknatısların oluşturdukları manyetik alanlara etkirler.Reed-anahtarlarında ferromanyetik malzemeden yapılan (Fe-Ni karışımı, Fe=demir, Ni=nikel) kontak dilleri eritilerek cam bir pistona bağlanır. Pistonun içinde reaksiyona girmeyen ve yanmayan bir gaz
- 16. 16 (örneğin azot) bulunur. Reed-temassız algılayıcının yakınına bir manyetik alan yaklaştığı zaman, kontak dilleri manyetiklenir. Manyetiklenen kontak dilleri birbirlerini çeker ve kontak kapanır. Şekil 13: Örnek bir reed kontak 4.2.2.2. Hall (Alan)Etkili Sensör Başka bir tür manyetik sensör ileyarı iletkenden yapılmış “hall sensörü” denir. Yarı iletkenden elektronlar aktığı zaman akım yönüne dik manyetik alan uyguladığımızda elektronlar belli yerde toplanır. Toplanan elektronlar yarı iletkenin öbür uçlarında gerilimi meydana gelmesine sebep olur. Buna hall etkisi adı verilir. Gerilim ile manyetik alanın şiddeti ve varlığı ile algılanır. Şekil 14: Alan etkili sensör 4.2.3. Endüktif Sensörler Manyetik alanlarına giren metal nesneleri, hareket etseler de, etmeseler de temassız olarak algılar.
- 17. 17 Şekil 15: Endüktif sensörünün yapısı ve bağlantısı Şekil 16: Endüktif sensörün metal cisimi algılaması 4.2.4. Kapasitif Sensörler Metallerin yanı sıra plastik, tahta, kağıt, kumaş vb. malzemeleri algılayan sensör çeşididir. Bu sensörler ilke olarak indüktif sensörlere benzer. Fiyatları indüktif sensörlerden daha pahalı, optik sensörlere göre hemen hemen aynıdır. Algılama mesafeleri indüktifsensörlere göre daha fazladır. Şekil 17: Kapasitif sensörünün yapısı ve bağlantısı
- 18. 18 Şekil 18: Kapasitif sensörün metal cisimi algılaması 4.2.5. Optik Sensörler 4.2.5.1. LDR Işığa karşı öz direnci değişen üzerinden geçen akımı değiştiren elemanlara optik sensör denir. Işık miktarındaki değişmeleri elektriksel olarak dönüştürürler. Optik sensörler küçük akımlı cihazlardır. Optik sensörler büyük akımları taşımaz, yalnız kumanda devrelerini çalıştırırlar. Şekil 19: LDR 4.2.5.2. Foto Diyot Foto diyotlar ışık etkisi ile ters yönde iletken olan diyotlardır. Ters polarma altında kullanılır. Doğru polarmada normal diyotlar gibi çalışır, ters polarmada ise N ve P maddelerinin birleşim yüzeyine ışık düşene kadar yalıtkandır. Birleşim yüzeyine
- 19. 19 ışık düştüğünde ise birleşim yüzeyindeki elektron ve oyuklar açığa çıkar ve bu şekilde foto diyot üzerinden akım geçer. Buakımın boyutu yaklaşık 20 mikroamper civarındadır. Üzerine ışık düştüğünde katotdan anota doğru akım geçiren elemanlara foto diyot denir. Foto diyot televizyon veya müzik setlerinin kumanda alıcılarında yaygın olarak kullanılır.Eğer Foto diyot, avometre çıkış polaritesine ters olarak bağlanıp üzerine ışık tutulursadirencinin azaldığı ve üzeri karartıldığında direncinin arttığı gözlemlenirse foto diyot sağlamdır. Şekil 20: Foto Diyot Örnekleri 4.2.5.3. Foto Pil Güneş pilleri (fotovoltaik piller), yüzeylerine gelen güneş ışığını doğrudan elektrik enerjisine dönüştüren yarıiletken maddelerdir. Yüzeyleri kare, dikdörtgen, daire şeklinde biçimlendirilen güneş pillerinin alanları genellikle 100 cm² civarında, kalınlıkları ise 0,2-0,4 mm arasındadır. Güneş pilleri transistörler, doğrultucu diyotlar gibi yarı iletken maddelerden yapılmaktadır. Yarı iletken özellik gösteren birçok madde arasından güneş pili yapmak için en elverişli olanlar, silisyum, galyum arsenid, kadmiyum tellür gibi maddelerdir. Bu maddeler güneş pilleri için özel olarak hazırlandıktan sonra PN eklemine güneş enerjisi geldiğinde fotonlardaki elektron yükü PN maddeleri arasında bir potansiyel fark yani gerilim oluşturur. Bu gerilim 0,15 ~ 0,5 volt civarındadır. Işık
- 20. 20 pilleri seri bağlanarak daha büyük gerilim, paralel bağlanarak daha büyük akım elde edilebilir. Güneş enerjisiyle çalışan hesap makinelerinde kullanılan eleman ışık pilidir. Şekil 21: Foto Pil Elemanı Görünümü 4.2.5.4. Optokuplör Optokuplör kelime anlamı olarak optik kuplaj anlamına gelir. Kuplaj bir sistem içindeki iki katın birbirinden ayrılması ama aralarındaki sinyal iletişiminin devam etmesi olayıdır. Ayrılma fiziksel olarak gerçekleşir ama iletişim manyetik veya optik olarak devam eder. Bu durumun faydası, katlardan birinde olan fazla akım, yüksek gerilim gibi olumsuz, sisteme zarar verecek etkilerden diğer katları korumaktır. Işık yayan eleman ile ışık algılayan elemanın aynı gövde içinde birleştirilmesiyle elde edilen elemanlara optokuplör denir. Bu elemanlarda ışık yayan eleman olarak "LED", "Enfraruj LED" kullanılırken ışık algılayıcı olarak "foto diyot", "foto transistör", "foto tristör", "foto triyak"vb. gibi elemanlar kullanılır. Şekil 22: Optokuplör görünümü ve yapısı
- 21. 21 4.2.5.5. Foto Transistörler Fototransistörler diğer transistörlerden farklı olarak base bacağı yerine base ile kollektörün birleşim yüzeyine düşen ışıkla tetiklenirler. Genellikle led ile birlikte yansıma sensörü olarak kullanılırlar. Şekil 22: Fototransistör görünümü ve yapısı 4.2.5.6. Engel Algılama Sensörleri Engel tanıma sensörleri gelişmiş yansımalı sensörlerdir. Bu sensörler bir IR verici led tarafından yayılan IR ışığın IR alıcı modül ile toplanması mantığıyla çalışırlar. IR ışınların yayılımı kodlanmıştır ( uzaktan kumandalardaki gibi ) ve kesik kesiktir. Sensörün kullanıldığı robot bir engelle karşılaştığında yayılan IR ışın geri yansır ve alıcı tarafından algılanır. Sensörün hassasiyeti IR ışığın gücüne, yansımanın olduğu yüzeyin rengine, şekline , yapısına, yansıma açısına ve alıcının hassasiyetine bağlı olarak değişebilir. Şekil 23: TSOP1738 IR Alıcı Modül
- 22. 22 4.2.5.7. Mesafe Algılama Sensörleri Robot ve otomasyon projelerinde bazen sadece engeli algılamak yeterli olmayabilir. Mesafe algılaması gerektiren durumlardan SHARP mesafe algılayıcı sensörler kullanılır. SHARP sensörün yaydığı IR ışık engele çarpıp geri yansır ve yansıyan IR ışık SHARP sensörün alıcısı tarafından algılanır. Engel ile SHARP sensör arasındaki mesafeye bağlı olarak IR ışığın yansıma açısı ve ışığın dedektör üzerinde düştüğü nokta değişir. Dedektör bu veriyi okur ve mesafeyi hesaplar. Şekil 24: Sharp mesafe algılama sensörü 4.2.5.8. PIR Sensörler PIR sensörler görüş alanlarındaki insanların ve sıcak kanlı canlıların yaydıkları IR ışıkları algılayabilen sensörlerdir. Genellikle hareket sensörü olarak kullanılırlar (hırsız alarmları, otomatik aydınlatma üniteleri gibi yerlerde). PIR sensörlerdeki algılama mesafesinin arttırılması ortamdan gelen ışığın Freshnel lens (mercek filtre) ile IR ışınların kırılma açılarının tam sensör üzerine düşürülüp odaklanmasıyla sağlanır. Canlı hareket ettiğinde sensörün çokgen yapısından dolayı algıladığı ışığın anlık olarak kesilip yeniden sensör üzerine düşmesi ile PIR sensör hareketi algılar. Yangın alarmlarında alev algılayan pyroelectric Infra red sensor kullanılır.
- 23. 23 Şekil 25: PIR sensörü 4.2.5.9. Encoderler (Şaft Pozisyon Algılayıcı) Encoderler robot ve otomasyon projelerinde açısal dönme hızını ve düzeneğin açısal pozisyonunu belirlemek amacıyla kullanılır. Encoder diskinin üzerinde belirli aralıkla delikler vardır. Encoder diski dönerken IR ledin yaydığı ışık deliklerden geçer ve karşı taraftaki fototransistörü tetikler. Delik olmayan kısımlarda ise IR ışık fototransistörü tetikleyemez. Bu şekilde alınan sinyaller sayılabilir ve mikrodenetleyiciye gönderilebilir. Mikrodenetleyicide yazılı program ile sinyaller işlenerek gerekli işlemlerin gerçekleştirilmesi sağlanır. Bir diğer encoder diskide üzerinde delikler yerine siyah ve beyaz renkte dilimler olan encoder diskleridir. Bu tip encoder disklerinde sensör olarak yansımalı sensörler kullanılır. Beyaz ve siyah renklerin algılanması sayesinde açısal dönem hızı ve pozisyon belirlenir.
- 24. 24 Şekil 26: Encoder şekli ve yapısı 4.2.6. Ses Sensörleri 4.2.6.1. Ultrasonik Sensörler Ultrasonik sensörler genellikle robotlarda engellerden kaçmak, navigasyon ve bulunan yerin haritasını çıkarmak amacıyla kullanılmaktadır.Bu türden çalışmaları ilk olarak,Polaroid firması ultrasonik sensörü kullanarak ve bunu bir aletin içine koyup kamera uzaklığını anlayan sistem geliştirmiştir. Ultrasonik ses dalgaları 20.000 Hz ile 500.000 Hz arasında frekanslara sahip ses dalgalarıdır. Bizim duyabildiğimiz 300 Hz-14.000 Hz bandının üzerindedirler. Ultrasonik sensörler ultrasonik ses dalgaları yayan ve bunların engellere çarpıp geri dönmesine kadar geçen süreyi hesaplayarak aradaki uzaklığı belirleyebilen sensörlerdir. Bu sensörlerde bu kadar yüksek frekanslarda ses dalgalarının yayılmasının nedeni ; bu frekanslardaki dalgaların düzgün doğrusal şekilde ilerlemeleri , enerjilerinin yüksek olması ve sert yüzeylerden kolayca yansımasıdır. Ultrasonik sensörlerin algılama menzili uygun koşullarda 30 metreye varabilir. Ultrasonik sensörlerde iki adet transducer bulunur. Bunlardan biri ultrasonik speaker diğeri de ultrasonik mikrofondur. Elektronik devre ile ultrasonik speaker'dan ses dalgasının yayılma anı ile bu ses dalgasının engele çarpıp yansıyarak ultrasonik mikrofon tarafından algılanması arasındaki zaman ölçülür ve bu zamanın ikiye
- 25. 25 bölünüp ses hızı ile çarpılması sonucunda da engel ile ultrasonik sensör arasındaki mesafe hesaplanır. Robotlarda genellikle 40 kHz'lik ultrasonik sensörler kullanılmaktadır. Çalışma Prensibi: Ultrasonik uzaklık sensörü, piezoelektrik transducerden gelen 40khz ultrasonik sesin kısa darbelerini yayarak çalışmaktadır. Ses enerjisinin küçük bir kısmı sensörün önündeki cisimlerden yansıyarak dedektöre yani farklı bir piezoelektrik transducere gelir (Şekil 7.1). Alıcı yükselteci yansıyan işareti (ekoları) sinyal dedeksiyon sistemine veya mikrokontrolöre gönderir. Sinyalin havadaki hızına bağlı olarak mikrokontrolör, cisimlerin ne kadar uzakta olduklarını zamanlama prosesi koşarak belirler. Şekil 27: Örnek bir ultrasonik 4.2.6.2. Mikrofon (Ses Sensörü) Biz konuştuğumuzda havayı titreştirerek hava da bir basınç değişikliği oluşturuyoruz. Duyma işleminde ise bu basınç değişikliğini kulaklarımızdaki zar ile algılıyoruz. Mikrofonlar da tıpkı kulaklarımız gibi havadaki basınç değişikliğinin yarattığı etkiden yararlanarak sesi algılıyor ve elektrik sinyaline çeviriyor. Sesi elektrik sinyallerine çeviren cihazlara “mikrofon” denir.
- 26. 26 Şekil de görüldüğü gibi, ağzından çıkan veya herhangi bir şekilde yayınlanan ses havada basınç değişimi yaratmakta ve bu basınç değişimi, suya atılan taşın yarattığı dalgaya benzer şekilde havada bir dalga iletimi şeklinde yayılmaktadır. Ses aslında hava basıncındaki değişimdir. Bütün mikrofonların yapısı, ses dalgalarının bir diyaframı titreştirmesi esasına dayanmaktadır. Her sesin belirli bir şiddeti vardır. Bu ses şiddetinin havada yarattığı basınç ses şiddeti ile doğru orantılıdır. Gelen hava basıncının büyüklük ve küçüklüğüne göre ileri geri titreşen diyaframın bu titreşimini, elektrik enerjisine çevirmek için değişik yöntemler kullanılmaktadır. Kullanılan yöntemlere göre de mikrofonlara isim verilmektedir. Ses algılaması gerektiren robot ve otomasyon projelerinde mikrofon kullanarak yapılan ses sensörü devreleri kullanılır. Mikrofonlarda önemli olan unsur diyaframdır. Diyafram ses dalgalarıyla titreşir ve bu titreşimler mikrofonun çeşidine ve yapısına göre farklı biçimlerde elektrik sinyallerine dönüştürülür. Mikrofonların frekans, empedans, duyarlılık ve alış yönü gibi karakteristik özellikleri vardır. Bu karakteristik özellikler mikrofonun çeşidine ve kalitesine göre farklılık gösterir ve uygulamaya göre mikrofon seçiminde rol oynar. Mikrofonlara sağlamlık testi uygularken öncelikle mikrofonun özelliğine göre direncine bakılır. Katalogda ya da üzerinde belirtilen direnç değerleri avometre ile kontrol edilir. Mikrofonun çıkışına bir preamplifikatör (çok küçük sinyalleri yükselten yükseltici) bağlanır. Preamplifikatörün çıkışına da bir osilaskop bağlayarak mikrofona ses dalgası verilir. Uyguladığımız seslere göre osilaskop ekranında AC titreşimler oluşuyorsa mikrofon sağlamdır. Mikrofon çeşitleri: Dinamik (bobinli - manyetik) mikrofonlar Kapasitif (kondansatör) mikrofonlar Şeritli (bantlı) mikrofonlar
- 27. 27 Kristal (Piezoelektrik kristalli) mikrofonlar Karbon tozlu mikrofonlar Elektret mikrofonlar Şekil 28: Mikrofon 4.2.6.2.1. Dinamik (Bobinli - Manyetik) Mikrofonlar Dinamik mikrofonlar ses dalgaları ile hareket eden diyaframa bağlı bobinin sabit bir mıknatıs içinde hareket etmesinden dolayı bobin uçlarında oluşan gerilim değişimine bağlı olarak çalışır. Ses dalgalarıyla titreşen diyafram, bağlı bulunduğu bobini, sabit mıknatıs içerisinde ileri-geri hareket ettirir. Sabit mıknatısın kutupları arasında manyetik alan hatları vardır. Bobin iletkenleri hareket sırasında bu manyetik alan hatlarını kesmektedir. Manyetik alan içerisinde hareket eden iletkenin uçları arasında bir gerilim oluşur.
- 28. 28 Şekil 29: Dinamik mikrofon örnekleri Sürekli ileri-geri titreşim halinde bulunan bobinde de ses frekans ına uygun olarak değişen bir gerilim oluşur. Mikrofon bobini uçlarında oluşan gerilim, bir ses frekans yükseltecine verildiğinde, hoparlörden aynı frekansta çıkış alınır. Böylece mikrofona yapılan konuşma veya melodi kuvvetlendirilmiş olarak sese dönüştürülür. Dinamik mikrofon bobininin direnci birkaç ohm "Ω" kadardır. Şekil 30: Dinamik mikrofonun yapısı Dinamik mikrofon, Şekil de görüldüğü gibi şu bölümlerden oluşmaktadır: Diyafram Diyaframa bağlı hareketli bobin
- 29. 29 Bobinin içerisinde hareket ettiği sabit mıknatıs Empedans uygunluğu sağlayan küçük bir transformatör (Bazı dinamik mikrofonlarda bulunur). Dinamik mikrofonlar kullanım sırasında, elektriksel alandan uzak tutulmalıdır. En çok kullanılan mikrofon türüdür. 4.2.6.2.2. Kapasitif (Kondansatör) Mikrofonlar Kapasitif mikrofonlar statik elektriklenme esasına göre çalışan mikrofonlardır. Kapasitif mikrofonların diyaframı gelen ses dalgalarıyla titreşir ve bu titreşim mikrofonun kapasitesinin değişimine neden olur. Kapasitedeki bu değişim sesin özelliğine uygun olarak mikrofonun çıkışında elektrik sinyallerini oluşturur. Şekilde görüldüğü gibi bir sabit levha ve bir de hareketli iletken levha arasında hava boşluğu bırakılarak kapasite elde edilir. Hareketli levha aynı zamanda diyafram görevi de yapar. Kapasitif mikrofonlar şarjlı bir kondansatörün yükü değiştirildiğinde elektrik akımının elde edilmesi esasına dayalı olarak çalışır. UCC bataryası (1,5-45V) sürekli olarak beslediği için kondansatörlü mikrofon sürekli şarjlıdır. Ses dalgalar diyaframa çarptığı nda mekanik titreşimler meydana gelir. Titreşimin plakalar arasındaki hava aralığını daralıp genişletmesiyle kapasite değişimi sağlar. Kapasitenin değişmesi ile devreden küçük bir akım geçer. Devreden geçen akım direnç üzerinde bir gerilim düşümü meydan getirir. Bu gerilim küçük olduğu için bir yükselteç devresiyle yükseltilerek kullanılır.
- 30. 30 Şekil 31: Kapasitif mikrofonun yapısı Kapasitif mikrofonların yüksek seslerde az distorsiyonlu olduklar için çok tercih edilir. Fakat fiyatları da kaliteleri gibi yüksektir. Başlıca şu üstünlüklere sahiptir: 50 - 15000 Hz arasında oldukça geniş bir frekans karakteristiği vardır. Distorsiyon azdır. Empedansı büyüktür (10 - 50 MΩ). Bu özelliklere karşın şu tip dezavantajları vardır: Diğer mikrofonlardan farklı olarak, bir besleme kaynağına ihtiyacı vardır. Yükselteç ile mikrofon arası kablonun kapasitif etkisi mikrofon kapasitesini etkileyerek parazite neden olur. Bu etkiyi azaltmak amacıyla mikrofon içine bir yükselteç konur. Kapasitif mikrofonların devreye bağlantısı DC beslemeli olarak yapılır. Mikrofonun plâkalarına uygulanan DC, modele göre 1,5 - 48 V arasında değişmektedir. Günümüzde yaygın olarak kullanılan kapasitif mikrofonların DC beslemesinde bir ya da iki adet kalem pil bulunur. DC akım ile beslenerek
- 31. 31 kullanıldıkları ve küçük boyutlarda üretilebildikleri için robotik çalışmalar için uygundur. 4.2.6.2.3. Şeritli (Bantlı) Mikrofonlar Çalışmaları dinamik mikrofonlar gibi manyetik alan esasına dayalı mikrofonlardır. Şekil de görüldüğü gibi manyetik alan içine yerleştirilmiş ince bir alüminyum ya da kalay levhaya ses sinyalleri çarpınca, manyetik alan içinde hareket eden levhada ses frekanslı akım oluşur. Şeritli mikrofonların empedeansı çok düşük, kaliteleri yüksektir. Sarsıntıdan, rüzgârdan olumsuz etkilendiklerinden kapalı ortamlarda kullanılır. Şekil 32. Şeritli mikrofonun yapısı 4.2.6.2.4. Kristal (Piezoelektrik kristalli) Mikrofonlar Kuartz (quartz), roşel (rochelle) tuzu, baryum, turmalin gibi kristal yapılı maddelere basınç uygulandığında üzerlerinde elektrik akımı oluşur. Bu akım, basıncın kuvvetine ve frekansına göre değişir. İşte bu esastan yararlanarak kristal mikrofonlar
- 32. 32 yapılmıştır. Kristalli mikrofonlarda, kristal madde Şekil 7.9' da görüldüğü gibi çok ince iki metal elektrot arasına yerleştirilmiş ve bir pin (küçük çubuk) ile diyaframa tutturulmuştur. Ses titreşimleri diyaframı titreştirince kristal de titreşmektedir. Kristaldeki titreşim ise AA özellikli elektriksel sinyallerin oluşmasını sağlamaktadır. Şekil 33. Kristal mikrofonun yapısı 4.2.6.2.5. Karbon Tozlu Mikrofonlar Karbon tozlu mikrofonlar Şekil 7.10’de görüldüğü gibi bir hazne içinde doldurulan karbon tozu zerrecikleri ve esnek diyaframdan oluşmuştur. Ses dalgaları alüminyum diyaframa çarpınca titreşerek karbon zerreciklerinin sıkışıp gevşemesine yol açar. Tozlar sıkışınca akımın yolu kısalacağından direnç azalır. Tozlar gevşeyince ise akımın yolu uzayacağından direnç yükselir. İşte bu işlem esnasında sesin şiddetine göre karbon tozlarından geçen akım değişken özellik gösterir. Karbon tozlu mikrofonların çalışabilmesi için bir DA besleme kaynağına gereksinim vardır. Bu tip mikrofonların empedansları 50 ohm dolayında olup çok küçüktür. Ayrıca, kömür tozları zamanla özelliğini kaybettiğinden mikrofonun
- 33. 33 hassasiyeti bozulmaktadır. İşte bu nedenle günümüzde çok kullanılan bir mikrofon tipi olmayıp, eski tip telefonlarda vb. karşımıza çıkmaktadır. Şekil 34: Karbon tozlu mikrofonun yapısı 4.2.6.3. Hoparlör Elektriksel sinyalleri insan kulağının duyabileceği ses sinyallerine çeviren elemanlara “hoparlör” denir. Sağlamlık testi yapılırken Avometre Ohm konumuna (200 ohm) alınır. Yapılan ölçümde üzerinde yazılı olan direnç değeri (4,8,16 Ohm gibi) okunmalıdır. Bunun yanında ölçüm esnasında hoparlör bobini, membranı bir miktar titreştirmelidir. Çok küçük bir ses çıkarmalıdır. Şekil 35: Hoparlör
- 34. 34 4.2.6.3.1. Dinamik (Hareketli Bobinli) Hoparlörler Dinamik hoparlörlerde yükselteçten gelen AC özellikli sinyaller hoparlör içindeki bobinin etrafında değişken bir manyetik alan oluşturur. Bu alan ile sabit mıknatısın alanı birbirini itip çekerek diyaframın titreşimine sebep olur. Diyaframın ses sinyallerine göre titreşimi havayı titreştirir. Kulak zarı da buna bağlı olarak titreşerek sesleri algılamamızı sağlar. Şekil de görüldüğü gibi dinamik hoparlörler, bobin, mıknatıs, kon (diyafram) gibi elemanların birleşiminden oluşmuştur. Bu elemanlarda demirden yapılmış bir silindirin ortasına doğal mıknatıs yerleştirilmiştir. Mıknatısla yumuşak demir arasındaki hava aralığına ise hoparlör diyaframının uzantısı üzerine sarılmış bobin konmuştur. Bobinin sarıldığı diyaframın alt kısmı bir süspansiyon (esnek taşıyıcı) ile gövdeye tutturulmuştur. Bobin, süspansiyonlar sayesinde hava aralığında rahatça hareket edebilmektedir. Hoparlörlerde kon iki tanedir. Geniş çaplı olan dışarıda, küçük çaplı olan ortadadır. Büyük kon kalın (bas) sesleri, küçük kon ise ince (tiz) sesleri oluşturur. Şekil 36: Hoparlörün yapısı
- 35. 35 4.2.6.3.2. Piezoelektrik (Kristal) Hoparlörler Şekil de yapıları görülen piezoelektrik hoparlörler çizgi biçiminde, birbirine karşı polarize edilmiş, bükülgen piezooksit (kurşun, elmas, titan karışımı) maddeden yapılmıştır.Şeritlere akım uygulandığında, boyut uzayıp kısalır ve karşıdakini itip çeker. Bu titreşim ise esnek membranı hareket ettirerek ses oluşur. Piezoelektrik hoparlörler daha çok yüksek frekanslı seslerin elde edilmesinde (kolonların tivitırlarında) ve kulaklıklarda kullanılmaktadır. Aynı zamanda dijital saatlerde kullanılan hoparlörlerde buzzer olarak piezoelektrik esasına göre çalışır. Şekil 37: Piezoelektrik hoparlörler 4.2.7. Kimyasal Sensörler 4.2.7.1. LPG Gaz Sensörleri Otomasyon projelerinde sıkça kullanılangaz sensörüdür. Algılama hassasiyeti =>100-10,000 ppm Tespit edilen gazlar => izobutan, propan Özellikleri =>10 Sn'de tepki süresi Şekil 38:LPG gaz sensörü
- 36. 36 5. Diğer sensörler 1-)Akış ölçüm sensörleri Akış transdüserleri kalorimetrik algılama metoduna uygun olarak çalışırlar ( sıcaklık transferi/soğutma davranışı ).Sıcaklığa bağımlı olarak değişen iki direnç bir ölçüm köprüsü olarak sensörün içine yerleştirilmiştir. Dirençlerden biri akışkan sıvı etrafındaki sıcaklığı ölçen aygıttır diğeri ise ısıtıcı elemana termal bağlantılıdır. Isıtıcı elemana gerilim uygulandığında her iki direnç arasındaki ölçüm sonucu bir sıcaklık farkı yaratır.Sıvı akmadığı müddetçe bu fark sabit bir değerdir. 2-)Yoğunluk ölçüm sensörleri
- 37. 37 Yoğunluk ölçüm cihazları sıvıların ve katı maddelerin yoğunluğunu yüzdürme yöntemi ile belirler. Aslında yoğunlukölçüm cihazları kesin doğruluğa sahip elektriksel teraziler olarak görülebilirler. Plastik, kauçuk sıvılar, sinterli metaller, seramik, cam ve diğer A-metallerin yoğunluk ölçümleri için uygundurlar. Bu yoğunluk belirleme tarzı yüksek doğruluk oranı ve hızlı ölçüm sonucu imkanı ile öne çıkmaktadır. Yoğunluk ölçümü yüzdürme yönteminde kullanılan camdan bir bob ile yapılmaktadır. Katı maddelerde ise yoğunluk tespiti kitle probun ağırlık ve hacminin ölçülmesi ile gerçekleşmektedir. Bu esnada yoğunluk ölçüm cihazları mevcut olan terazi ile nesnenin ağırlığı belirlenirken probun yüzme seviyesinden yola çıkarak hacim ölçüm gerçekleşmektedir ki bunun için kullanılan sıvının hacmi bilinmelidir. Sıvıların hacminin sıcaklığa bağlı olması sebebiyle yoğunluk ölçüm cihazları ölçüm sonuclarının manüel veya otomatik bir sıcaklık kompenzasyonuna sahiptir. Yüzdürme kuvveti uzaklaştırılan sıvının ağırlığına eşittir. 3-)Ph ölçüm sensörleri Ph, elektrik sinyali üreten bir araç (elektrot) kullanılarak Ph metre cihazı sayesinde bu elektriksel sinyali, Ph birimine çeviren potansiyometrik bir ölçümdür. Üretilen ve ölçülen sinyal bir voltajdır. pH ölçümünü yapabilmek için iki gerilime ihtiyaç vardır, Ph ölçümü için gerekli olan elektriksel sinyal bu iki gerilim arasındaki fark ile oluşur.Bu iki gerilim şunlardır:
- 38. 38 1- Algılama elektrotu ürün içindeki hidrojen iyon aktivitesinin logaritmasına oransal bir gerilim sağlar, 2- Referans elektrot ideal olarak ürünün aktivitesinden bağımsız sabit ve sürekli bir gerilim sağlar. Referans ve algılama elektrotu arasındaki bu gerilim farkı ph metre tarafından ölçülür ve pH değerine çevrilir. 4-)360o eğim sensörü FTA18 Açı sensörünü bir çok farklı amaç için kullanabilirsiniz. 0-180 derece ölçme aralığında 0,04 derece hassasiyetinde 0-10 volt, 0-20 ma. veya 4-20 ma. kısa devre korumalı çıkışı vardır. Hatalı bağlantı koruması mevcuttur. Bu sensör ile dairesel hareketlerin posizyon ölçümünü ve açısal ölçümünü yapabilirsiniz. Potansiyometre gibi sürtünmesi olmadığı için sensör çok uzun ömürlüdür. Vibrasyondan etkilenmez, Su geçirmez (waterproof). 0,333 milisaniye ölçüm zamanı ile son derece hızlı ve hatasız olarak posizyon bilgisini analog çıkışa aktarır. Endüstriyel uygulamalarda linear cetvel, potansiyometre, enkoder ile yapılan bir çok ölçme işlemini FTA18 açı sensörü ile yapabilirsiniz. Enkoder elektrik yok iken posizyonu değiştiğinde konumunu kaybeder, oysa FTA18 açı sensörü enerjilendiğinde
- 39. 39 bulunduğu açıyı tespit eder. Potansiyometre ve lineer potansiyometre ile yapılan ölçüm işlemlerinde kısa ömürlü oluşları en büyük dezavantajdır. Ayrıca lineer potansiyometreler oldukça pahalıdır. Potansiyometre için 10 volt kaynak ihtiyacı vardır, kolaylıkla temin edilemez. Oysa açı sensörü 12-30 volt ile çalışır. Aşağıdaki örnek de lineer cetvel ile açı sensörü karşılaştırılmıştır. Lineer Potansiyometre Karşılaştırması: Bu örnekte dairesel hareket eden bir kol ve bu hareketi ölçen Lineer cetvel ve Açı sensörü görülmektedir. Kolun toplam uzunluğu 100 cm olmasına rağmen lineer cetvel maaliyetini azaltmak için kolun yarısında 70 cm. mesafe’ye bağlanmıştır. Lineer cetveller potansiyometre tipi ve manyetik tipleri mevcuttur. Manyetik tipleri çok pahalı olduğundan örneğimizde potansiyometre tipi kullanılmıştır. Okuma hassasiyeti 1 mm’dir. Cetvel kullanıldıkça bu hassasiyet bozulacaktır. Açı sensöründe ise sürtünme olmadığından kullanım ömrü sonderece uzundur. Cetvel 1 mm hareket ettiğinde kolun en ucundaki hareket 2 mm olacaktır. Açı sensörü ise 0,04 derece ölçüm kaabiliyetine sahip olduğundan kolun en ucundaki hareketi daha hassas okuyacaktır. Yarı çapı 100 cm olan dairenin çevresin 628 cm’dir. 0,04 derece ise 0,0696 cm’dir. Böylece kolun ucundaki hareketi 0,696 mm hassasiyetinde okuyabiliriz.
- 40. 40 5-)Seviye ölçüm sensörleri Seviye Ölçüm Yöntemleri Seviye Kontrolü uygulamalarında, bir çok eski ve geleneksel metodlar halen kullanılıyor olmasına rağmen, biz burada seviye ölçümüne genel bir bakış oluşturmak ve farklı yöntemler de olduğunun bilinmesini sağlamak istiyoruz. Seviye ölçüm uygulamalarında öncelikli olarak yapılması gereken, müşterinin tek noktada mı yoksa sürekli olarak mı veya her iki şekilde birden mi seviyeyi kontrol etmek istediğinin belirlenmesidir. Var olan çok çeşitli ölçüm metodları arasından, uygulama için en uygun olanını belirlemek en kritik noktadır. Yukarıda da belirtildiği gibi; seviye sensörleri iki ana kategoriye ayrılabilir. *Noktasal seviye kontrolünde kullanılan seviye şalterleri Seviye şalterleri genellikle temaslı enstrümanlardır ve kabın içerisindeki ürünün belirli bir noktadaki varlığının veya yokluğunun belirlenmesi için kullanılır. Nereye monte edildiklerine bağlı olarak, kabın, tankın, deponun dolu, boş veya aradaki bir seviyede olduğunun sinyalini verirler. Bu tip seviye şalterlerinin bazıları, ultrasonik şalterler, kuru ve katı malzemeler için pedallı seviye şalterleri, kapasitif problar, iletkenlik probları, hem sıvı hem katı malzemelerde kullanılan titreşim
- 41. 41 probları, yatay veya dikey olarak monte edilen tekli veya çoklu şamandıralı seviye şalterleridir. *Sürekli tip seviye sensörleri Temaslı veya temassız enstrümanlardır. Temaslı enstrümanların içerisinde, yük hücreleri (load-cell), hidro-statik basınç sensörleri, kapasite probları, rölelerin çekilip bırakılması prensibi ile çalışan elektro-mekanik cihazlar, radar ve magnetostrictive prensibi ile çalışan cihazlar bulunur. Temassız sürekli seviye sensörleri ise ultrasonik, açık hava radarları, lazerli veya nükleer seviye sensörlerini içermektedir. Seviyenin ölçülmesinden sonra ölçülen bilginin nasıl değerlendirileceğidir.(PLC , özel yazılımlar ,Dijital göstergeler….) 1.Görüntülü Seviye Ölçüm Yöntemleri Cam Tüp Temelde tanktaki sıvı seviyesini görebilmek için birleşik kaplar prensibi kullanılır. Tank kenarına monte edilen cam borudaki seviye, tank içerisindeki malzemenin seviyesi ile aynı olduğundan, seviye tank dışarısından kolaylıkla dışarıdan izlenebilir. Bu yöntemle, sisteme herhangi bir mekanik veya elektronik müdahale olmadığından, yalnızca görsel olarak seviye kontrolü yapılabilmektedir. Yansıtıcı (Refleks) Cam Malzemelerin çeşitli fazlarında ışığın farklı kırılması prensibine göre çalışan bir yöntemdir. Sıvılar, ışığı yuttukları için, refleks camda koyu renkli, gazlar ise ışığı daha az absorbe ettiklerinden daha açık renkte görülürler.
- 42. 42 Kuvvetle Seviye Ölçüm Yöntemleri Diyafram Genellikle içerisinde mıknatıs bulunan kolun, malzemenin baskısı ile içerisinde reed kontak veya micro-switch bulunan gövdeye yaklaşması sonucu alınan kontak ile malzemenin seviyesi kontrol edilir. Şamandıra prensibine benzer ancak katı malzemelerin seviye kontrolünde kullanılması avantajıdır. Tilt Şalter Genellikle kablolu seviye şalteri olarak anılan, cıvalı switch veya özel bir eğimli yol yardımıyla hareket eden bilyalı bir mekanizma ihtiva eden ve micro-switch yardımıyla kontak alınan seviye şalterleridir. Eğim açısına bağlı olarak, alt, üst veya her iki seviye kontrolü için kullanılması mümkündür. Ekonomikliği ve her türlü sıvı veya katı malzemede ve yanıcı – patlayıcı özellikli ortamlarda kullanılabilirliği nedeniyle tercih edilen bir noktasal seviye kontrol yöntemidir. 2.3. Şamandıra Sıvı seviyesine göre paslanmaz çelik tüp boyunca hareket eden mıknatıslı şamandıra ve tüp içerisine yerleştirilmiş reed rölelerden oluşur. Şamandıra, reed röleye yaklaştığında, içerisindeki mıknatısın manyetik kuvveti ile reed röle açılır veya kapanır. Reed rölelerin sıralı dizilmesiyle, sürekli seviye ölçümü de yapılabilir. Tankın yanından, üstünden kolaylıkla monte edilmesi ve herhangi bir kalibrasyon gerektirmemesi ve ekonomikliği sayesinde, kullanıcıya kolaylıklar sağladığından en çok tercih edilen seviye ölçüm metotlarından biridir. Ancak, sıvı viskozitesinin yüksek olduğu durumlarda temassız ölçüm yöntemlerine göre zayıf kaldığı bir gerçektir. 2.4. Manyetik Seviye Göstergeleri Temel olarak sıvının kaldırma kuvvetinin kullanıldığı görüntülü ölçüm yöntemidir. Birleşik kaplar prensibi gereği, tank ile manyetik seviye göstergesi içerisindeki sıvı seviyeleri aynıdır. Gösterge gövdesi içine yerleştirilen ve her sıvının yoğunluğuna bağlı olarak, kaldırma kuvvetine göre dizayn edilen şamandıranın içerisindeki mıknatıs, ana gövdenin dış yüzeyine yerleştirilmiş gösterge içerisindeki,
- 43. 43 mıknatıs ihtiva eden sezgi elemanlarını etkiler ve seviyenin yükselmesi veya alçalması sırasında sezgi elemanlarının sıra ile dönmesini sağlar. Sezgi elemanlarının farklı renklerde olan iki yüzü sayesinde de seviye bilgisi tank dışarısından kolaylıkla izlenebilir. Gövdenin üzerine yerleştirilen sıralı reed röleler yardımıyla sürekli seviye bilgisi analog sinyale dönüştürülebilirken, yine gövde üzerine istenen noktalara yerleştirilecek reed kontaklar sayesinde noktasal seviye kontrolü de yapılabilmektedir. Yüksek basınçlı tanklarda ve kazanlarda seviye ölçümü uygulamalarında kullanılabilecek en ekonomik ve sık rastlanan yöntemlerden biridir. Magnetostrictive Sensörler: Cihaz, temel olarak, gövde içerisine yerleştirilmiş bir magnetostrictive telden ve, içerisinde mıknatıs ihtiva eden bir şamandıradan oluşmaktadır. Şamandıra, cihazın gövdesi üzerinde dikey olarak hareket eden tek oynar parçasıdır. Magnetostrictive telden geçirilen pulse akımı sırasında, tel etrafında manyetik alan oluşur. Şamandıranın hareketi sırasında, şamandıranın manyetik alanının magnetostrictive telin etrafındaki manyetik alan ile etkileşimi sonucu, telde burulmadan kaynaklanan bir titreşim oluşur. Şamandıranın pozisyonu, burulmadan kaynaklanan titreşimin sensöre ulaşmasına kadar geçen zaman ile belirlenir. Basınç İle Seviye Ölçümü 3.1. Hidrostatik Basınç Sıvı seviyesinin sürekli ölçümünde en eski ve sık kullanılan yöntemlerden biri de kabın içerisindeki sıvının tabana uyguladığı hidrostatik basıncın ölçümüdür. Tankın alt yüzeyinde bulunan sensör, hidrostatik basıncı sıvı seviyesi ile orantılı bir akım sinyaline çevirir. İçerisinde silikon yağı ve metal veya seramik diyafram ihtiva eden yarı iletken transduser, hassasiyet ve sürekliliği arttırmak için kullanılır. Daldırma tip (submersible) seviye transmitterlerinde atmosferik basınç ile kompanzasyonun sağlanması amacıyla, hidrostatik basınç transmitteri kablosu içerisinde bir de hava tüpü bulunur. Hidrostatik basınç, sıvı sütununun yüksekliği ve sıvının özgül ağırlığının çarpımıdır.
- 44. 44 Fark Basınç Hidrostatik basınç yardımıyla seviye ölçümü ile aynı prensiptedir. Ancak, kapalı tanklarda oluşan, statik basıncın etkisi fark basınç yönteminde yok edilebilmektedir. Bubbler Basınç yöntemi ile temelde aynıdır. Basınç transmitterinin proses ile temasının istenmediği durumlarda kullanılır. Boruya verilen P hava basıncı nedeniyle borunun alt ucundan hava kabarcıkları yüzeye çıkar. Hava basıncı, sıvı hidrostatik basıncından küçük veya eşit ise kabarcıklanma durur. Bu noktada hava basıncı hidrostatik basınca eşittir. Elektriksel Yöntemlerle Seviye Ölçümü Isıl Kütle Bu cihazlar, ısının sıvı içerisinde yayılımı ile havadaki yayılımını karşılaştırarak, sıvının varlığını veya yokluğunu belirler. Sensör, termistor formu ile bir direnç ihtiva eder. Termistör, kendisine gerilim uygulandığında ısıtıcı gibi davranır ve aynı zamanda ısıyı algılar ve elektrik sinyaline dönüştürür. Termistör tarafından yaratılan ısı sıvı içinde yayıldığı anda switch çıkışı elde edilir.
- 45. 45 Kapasitif Kapasitif seviye sensörleri genellikle radyo frekansı teknolojisini kullanır. Kap içerisindeki sıvının, granüllerin, çimento benzeri malzemelerin seviyesinin tespit edilmesi için kapasitörlerin elektriksel karakteristiklerini kullanır. Giydirilmiş veya çıplak haldeki elektrot (prob) kapasitörün birinci iletken kısmı olarak tankın içerisine daldırılır. Tankın metal gövdesi ise diğer iletken olarak davranacaktır. Metal olmayan ve plastik tanklarda ise, çift elektrotlu sistemler kullanılmalıdır ki, ikinci elektrot diğer kapasitör iletkeni görevini görebilsin. Kapasitif seviye sensörü, tank içerisindeki malzemenin sensör probu boyunca hareket etmesi (artması veya azalması) sırasında meydana gelen kapasite değişimini ölçer. Bu kapasite değeri lineer bir ölçüm için de, belli bir noktadaki seviye bilgisinin kontak çıkışı olarak elde edilebilmesi için de kullanılabilir. İletkenlik İletkenlik tip seviye şalterleri, temel olarak, düşük voltaj kaynağı ile (genellikle < 20 V) elektrik akımını iletebilen malzemelerin iletkenliği üzerine kurulmuştur. 2, 3 veya daha fazla elektrottan oluşan seviye şalteri, algılanacak sıvı seviyesine yerleştirilir. Sıvı elektrotlara ulaştığında elektrotlar ile temas eder ve elektrotlar arasındaki elektrik devresi kapanmış olur. Bu sayede switch çıkışı elde edilir. Bu tip seviye sensörleri noktasal seviye kontrolünde kullanılır. İletken ve iletken olmayan iki sıvının ara yüzeyinin seviyesinin tespitinde de kullanılabilir. Endüktif Kapasitif ölçümüm manyetik alan versiyonudur. Bu yöntemde manyetik alan geçirgenliği (permabilite) ölçülür. Laboratuar çalışmaları dışında pek görülmez. Tank selfinin[1] değişimini izlemek için pek pratik değildir, büyük miktarlarda enerji gerektirir. Öte yandan, tankın oluşturduğu sistemin sağladığı çalışma frekansının (rezonans frekansı) değişimi ile de en azından şalter olarak ölçüm yapmak mümkündür. Metal detektörlerinin de çalışma prensibi budur. Ancak, seviye ölçümünde uygulanabilirliği zayıftır.
- 46. 46 Elektromekanik Yöntemlerle Seviye Ölçümü Motorlu Motor ve halat ucundaki seviye ağırlığından oluşur. Gövdeye halat ile bağlanmış ağırlık, motor vasıtası ile aşağıya doğru hareket eder. Silo içerisindeki katı malzemeye temas ettiğinde is başlangıç pozisyonuna döner. Geriye doğru sarılan halat uzunluğu, toplam uzunluktan çıkarıldığı zaman tank içerisindeki malzemenin seviyesi elde edilmiş olur. Tozdan etkilenmemesi ve yüksek sıcaklıklarda çalışabilmesi motorlu seviye şalterlerinin avantajlarıdır. 5.2. Mekanik Rotor (Pedallı Seviye Şalteri) Rotor pedalları, en eski seviye sensörlerinden biridir. Bu sensörler, kullanımı kolay, güvenilir ve her tür kuru yığının (talaş, tahıl, bakliyat, vs.) seviye ölçümünde uygulanabilirliği ile göze batar. Bu üniteler temel olarak 3-4 pedala bağlanmış şaftı çeviren küçük bir motordan oluşur. Şaft rahatlıkla dönebiliyorken, malzeme ile temas yoktur. Pedallar malzeme ile temas ettiğinde şaft yavaşlar veya tamamen durur. Bu sayede, cihazın takılı olduğu noktadaki seviyeye kadar malzeme ulaşmış demektir. Daha gelişmiş modelleri, malzemenin varlığını veya yokluğunu algılamanın yanında elektrik bağlantı hatası veya elektrik kesintisi gibi durumlarda kullanıcıyı uyarır. 5.3.Titreşim Prob, sonunda bulunan piezo-elektrik elemanı kullanarak titreşir. Bu piezo- elektrik eleman belirli bir vibrasyon frekansına set edilmiştir. Probun herhangi bir malzeme ile teması halinde, titreşim malzeme tarafından emilir. Vibrasyondaki bu değişim sensör tarafından hissedilir ve röle çıkışına dönüştürülür. Tek çubuklu cihazlar sadece katı malzemelerde kullanılırken, çift problu cihazlar, hem sıvı hem de katı malzemelerde kullanılabilir. Vibrasyon probları tipik olarak deponun üst kısmına veya yan tarafına monte edilir. Bu tamamen elektronik seviye şalterlerinin iki önemli avantajı vardır. Birincisi, farklı malzemeler için herhangi bir kalibrasyona ihtiyaç duymamalarıdır. İkincisi ise, bu probların çok düşük yoğunluklu malzemelerde bile sorunsuz çalışabilmeleridir.
- 47. 47 Optik Yöntemlerle Seviye Ölçümü 6.1. Işıklı (Optik) Beam Breaker Basit optik anahtarlama kullanılır. Sensördeki ışık miktarının değişimi, seviyenin bu noktada olduğunu belirtir. Bakım (özellikle temizlik) ihtiyacının fazlalığı nedeniyle seviye ölçümlerinde sık kullanılmaz. Referans ışık değişimine (kirliliğe) duyarsız ölçüm de mümkündür ancak maliyeti oldukça yüksektir. Bu ölçüm metodu seviye ölçümünden çok kirlilik ölçümü uygulamalarında daha kullanışlıdır. Radyasyon (Nükleer) Kaynaktan sensöre aktarılabilen tanecik sayısı (özellikle gamma izotopu) , radyoaktif ışınımın geçtiği ortamın kütlesi ile ters orantılıdır. Dolayısıyla, bu yöntemde kaynak – sensör arasındaki mesafe miktarı doğrudan ölçülüp buradan seviye bulunur. Daha çok yoğunluk ölçümüne uygun olan bir yöntemdir. Seviye ölçümü için ise maliyeti oldukça yüksektir. Dikkat edilmesi gereken bir başka nokta ise, seviyesi ölçülmek istenen malzemenin radyoaktif özellikli olmaması gerektiğidir. E/M Dalga ile Seviye Ölçüm Yöntemleri 7.1. Ultrasonik Ultrasonik seviye sensörleri, seviyenin tespit edilmesinde ses dalgalarını kullanır. Tankın üstüne yerleştirilen transduser içerisindeki piezoelektrik kristal, elektriksek sinyalleri belirli bir frekans ve sabit hızla ortam içerisinde dalgasal olarak hareket eden ses enerjisine dönüştürür. Ses dalgaları yayılır ve eko olarak transdusera geri döner. Cihaz, basitçe dalganın yayılamaya başlamasıyla, yüzeyden yansıyarak geri dönmesi arasında geçen süreyi ölçer. Bu süre, transduser ile seviyesi ölçülmek istenen malzemenin yüzeyi arasındaki uzaklıkla doğru orantılıdır ve malzemenin seviyesinin ölçülmesi için kullanılabilir. Ultrasonik seviye şalterleri, özellikle düşük viskoziteli sıvıların noktasal seviye ölçümlerinde alternatif bir yöntemdir. Şalterin bir yanında bulunan çevirici kristal ile diğer taraftaki alıcı kristal arasında malzeme olup olmadığını ses dalgalarının iletimi yöntemiyle algılar.
- 48. 48 Radar Bu yöntem, ultrasonik prensibe oldukça benzer bir metottur. Radar (bazen mikro-dalga olarak da adlandırılır) yönteminde, kabın üstüne yerleştirilen sensörden aşağı doğru yönlendirilmiş GHz mertebesinde yüksek frekanslı elektromanyetik dalgalar kullanılır. Gönderilen enerjinin seviyesi ölçülmek istenen sıvı yüzeyinden yansıyan kısmı, sensöre geri döner. Sinyalin gidip gelme süresi (uçuş süresi olarak da adlandırılır) seviyenin tespiti için kullanılan büyüklüktür. Non-Invasive olarak adlandırılan radar teknolojisinde herhangi bir tüp veya kablo kullanılmaz. FMCW (Frekans Modüler Sürekli Dalga) ve Pulse Radar iki farklı Non-Invasive radar teknolojisidir, Invasive radar teknolojisinde dalgaya kılavuzluk edecek sensörden tankın tabanına kadar uzanan bir kablo veya çubuk kullanılır.
- 49. 49 ------------------------- KAYNAKLAR --------------------------- 1- http://utkuonline.tripod.com/index.html 2- http://tr.wikipedia.org/wiki/Sensör 3- http://www.festo.com/cat/tr_tr/products_050000 4- MEGEP - Elektrik Elektronik Teknolojisi - Sensörler ve Transdüserler Modülü (pdf) 5- Elektriksel Olmayan büyüklüklerin elektriksel Yöntemlerle Ölçülmesi, (Mobil Robot Sensörleri) (pdf) 6- http://www.robotiksistem.com/sensor_nedir_sensor_cesitleri.html 7- http://www.elektrikrehberiniz.com/elektronik/sensor-ve-transduser-1907/ 8- http://makinecim.com/bilgi_5731_SENSORLER-VE-TRANSDUSERLER 9- http://elektronikproje-ramazans.blogcu.com/olcum-sistemleri-sensor-ve- transduserler/9091626 10- http://tr.wikipedia.org/wiki/Transdüser
- 50. 50