1. ECE 442 Power Electronics 1
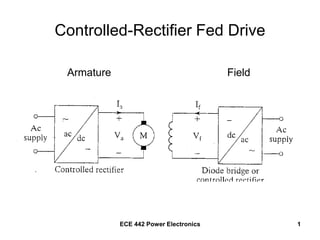
Controlled-Rectifier Fed Drive
Armature Field
2. ECE 442 Power Electronics 2
Chopper-Fed Drive
Armature Field
3. ECE 442 Power Electronics 3
Equivalent Circuit of a Separately-Excited
DC Motor
4. ECE 442 Power Electronics 4
f
f f f f
a
a a a a g
g v f
d t f a
d L
di
v R i L
dt
di
v R i L e
dt
e K i
T K i i
d
T J B T
dt
5. ECE 442 Power Electronics 5
0
f f f
g v f
a a a g
a a a v f
d t f a
d L
d d
Steady state
d
dt
V R I
E K I
V R I E
V R I K I
T K I I
T B T
P T
6. ECE 442 Power Electronics 6
a a a v f
a a a a a a
v f f
v
f
V R I K I
V I R V I R
K I V
K
R
Solve for the motor speed
7. ECE 442 Power Electronics 7
Control of the motor speed
• Control armature
voltage, Va
– Voltage control
• Control the field
current, If
– Current control
• Control the armature
current, Ia
a a a
f
v
f
V I R
V
K
R
8. ECE 442 Power Electronics 8
Magnetization Characteristic
9. ECE 442 Power Electronics 9
Characteristics of Separately-Excited Motors
Rated
speed
Use field-current control
Use armature
voltage control
10. ECE 442 Power Electronics 10
Equivalent circuit of a DC Series Motor
11. ECE 442 Power Electronics 11
( )
( )
( )
g v a
a a f a g
a a f a v f
d t a f
d L
a a f a
v f
E K I
V R R I E
V R R I K I
T K I I
T B T
V R R I
K I
12. ECE 442 Power Electronics 12
Controlling the Motor Speed
• Control the armature
voltage, Va
• Control the armature
current, Ia
( )
( )
a a f a g
a a f a v
d t a f
d L
a a f a
v f
V R R I K I
T K I I
T B T
V R R I
K I
13. ECE 442 Power Electronics 13
Characteristics of DC Series motors
14. ECE 442 Power Electronics 14
Operating Modes
• In variable-speed applications, a dc motor
may be operating in one or more of the
following “Modes”
• Motoring
• Regenerative braking
• Dynamic braking
• Plugging
15. ECE 442 Power Electronics 15
Motoring Mode
“Back emf”, Eg is < supply voltage Va
Both Ia and If are positive
Developed torque meets load demand
16. ECE 442 Power Electronics 16
Regenerative Braking Mode
Motor acts as a Generator
Eg becomes > supply Voltage Va
Ia becomes negative
Kinetic energy of the motor is returned to the supply
17. ECE 442 Power Electronics 17
Dynamic Braking
Replace the supply voltage with a resistor
Power dissipated in the resistor rather than given back
to the source
18. ECE 442 Power Electronics 18
Plugging
Reverse the armature terminals while running
Va and Eg act in the same direction
Ia is reversed, producing “braking” torque
19. ECE 442 Power Electronics 19
Four-Quadrant Operation
20. ECE 442 Power Electronics 20
Single-Phase DC Drive
Change Va by changing firing angle
Inductor Lm is a “smoothing” Inductor to prevent
discontinuous current
23. ECE 442 Power Electronics 23
Single-Phase Half-Wave Converter Drive
(1 cos )
2
0
(1 cos )
0
m
a a
a
m
f f
f
V
V
V
V
29. ECE 442 Power Electronics 29
Single-Phase Full-Converter Drives
30. ECE 442 Power Electronics 30
Quadrant(s) of Operation
Full converter – two quadrant converter
Output voltage polarity can be positive or negative
Output current has one polarity
32. ECE 442 Power Electronics 32
Single-Phase Dual-Converter Drives
Dual converter can operate in all four quadrants
Output voltage and current can be positive or negative