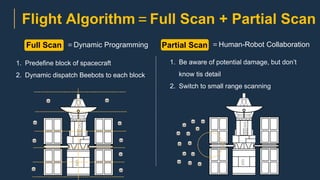
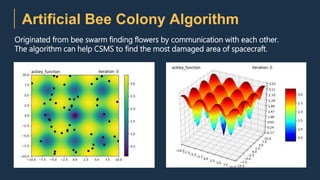
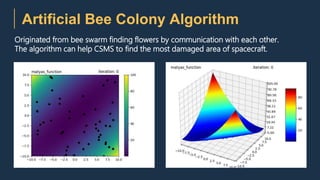
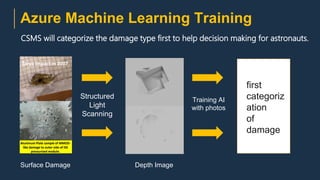
The document discusses the design of collaborative robots for spaceship monitoring, focusing on damage inspection during NASA's hackathon. It introduces an artificial bee colony algorithm for efficient damage assessment and highlights the robot's hardware design inspired by natural instincts. The project aims to enhance astronaut safety, reduce extravehicular activity time, and improve damage categorization through AI.




























![Fronczek joseph[1]](https://cdn.slidesharecdn.com/ss_thumbnails/fronczekjoseph1-140901115751-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

























