Design and Implementation of Robot Arm Control Using LabVIEW and ARM Controller
EV74_Teleoperations_Team_Poster
1. Design of FlexCraft Simulator with
Human Factors Analysis
Principle Investigator: Charlie Dischinger
EV74, Spacecraft and Vehicle Systems Branch
Abstract:
The FlexCraft is a single-manned concept vehicle integrated with robotic arms to help aid in various space applications such as, International Space Station servicing, satellite maintenance/recovery, and orbital debris
collection. The FlexCraft uses air bearings to create a virtually frictionless surface that simulates movement in space in the x and y directions. Both the vehicle and robotic arm will be controlled electronically using a
Programmable Logic Controller (PLC). The PLC allows the FlexCraft and arm to be controlled both when manned and remotely from a computer. After the construction is complete, we will test and modify the vehicle with
functionality and human factors guiding our analysis. In addition, we also created a simulation in Matlab of an 11-DOF human-like robotic arm. This simulation will be used to test different controllers to see what type of
controller would work best for the FlexCraft in the future.
Background:
The original version of the FlexCraft simulator was constructed
during the previous summer. Through initial testing, the original
simulator proved to contain several problems such as, weight
imbalance, difficult maneuverability, inaccessibility, and a non-
intuitive control system. This project was approached with an
emphasis on human interactions with the vehicle in order to
create the most functional design as well as to develop an
electronic control system that would allow for teleoperation
control.
In order to achieve this the following design constraints were
created:
• Even weight distribution
• Balanced thruster placement for 8 directions of movement
• Easily accessible for entry/exit
• Clear visibility within vehicle
• Intuitive control system
• Utilize self-contained air supply
• Robotic arm with 6-DOF for docking
Future Plans:
• Mount additional arms on the FlexCraft (the Flight Robotics
Lab has an 11-DOF arm that could potentially be used)
• Design simulation of robotic arm for future testing
• Develop new controller for robotic arm that is more intuitive
Methodology & Design:
FlexCraft
• Tested and analyzed initial model of the FlexCraft and robotic arm
• Set up constraints for new design with an emphasis on human factors
• Designed and constructed FlexCraft 2.0 with robotic docking arm in Pro
Engineer
• Test and analyze new model, with original constraints guiding analysis
Robotic Arm Simulation
• Imported CAD model of the arm into Simulink to create simulation of the arm
• Added arm constraints and motions as well as a PID controller to optimize joint
movements
• Interfaced Xbox controller to control individual joints and act as a baseline to
assess future controllers
• Created more intuitive controls by adding inverse kinematics to the simulation
Design
• Floatation system: air
bearings
• Thrusters: electronic
valves (2 per side, 8 total)
• Air supply: Two 100 cubic
feet scuba tanks, 4” and
2” PVC plenums
• Base Structure: 80/20
Aluminum, ½” Aluminum
plate
• Hull structure: 1/16”
Aluminum plate, 1/8”
Plexiglass
• Electronics: Galil RIO PLC,
servos, micro serial
servo controller
Results & Conclusions:
Results
• The structural design and thruster placement created even
weight distribution
• Number of thrusters allowed for greater directional control
• The new hull design established greater accessibility and
visibility
• Used a PLC to operate the vehicle/arm to allow for both
manual operation and remote control
• Increased the robotic arm to 6-DOF allowed for greater
docking capabilities
• The simulation of the 11-DOF arm provided a platform for
testing
Conclusions
The FlexCraft design implements key features necessary for
viable human interactions with the vehicle. These include:
weight balance, maneuverability, accessibility, and visibility
The 11-DOF arm simulation showed that an Xbox controller is
not the most feasible control method. Thus, the better option
would be to create a custom controller to allow for a more
intuitive control method.
Acknowledgements: We would like to thank our
mentors Charlie Dischinger and Ricky Howard for all their help
and support, Charles Cowen for his many hours of guidance and
assistance, Clay Robertson for his guidance and material support,
Tom Bryan for design support, Kendal Coker for helping us with
parts, and many others along the way.
Research Associates:
Ayotunde Demuren Harvard University
Alyssa John Utah State University
Timothy Provin Clemson University
Murphy Wonsick Florida Institute of Technology
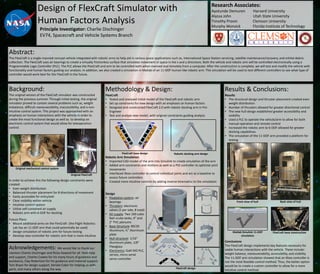
FlexCraft base design Robotic docking arm design
Original mechanical control system
Original FlexCraft
FlexCraft base constructionMatlab Simulink 11-DOF
simulation
FlexCraft design
Front view of hull Back view of hull