More Related Content
More from สุรินทร์ ดีแก้วเกษ
More from สุรินทร์ ดีแก้วเกษ (20)
ความหมายของหุ่นยนต์
- 1. ความหมายของหุนยนต
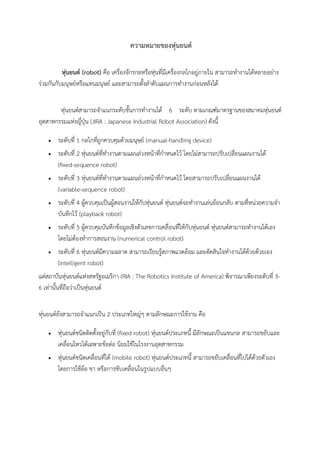
หุนยนต (robot) คือ เครื่องจักรกลหรือหุนที่มีเครื่องกลไกอยูภายใน สามารถทํางานไดหลายอยาง
รวมกันกับมนุษยหรือแทนมนุษย และสามารถตั้งลําดับแผนการทํางานกอนหลังได
หุนยนตสามารถจําแนกระดับขั้นการทํางานได 6 ระดับ ตามเกณฑมาตรฐานของสมาคมหุนยนต
อุตสาหกรรมแหงญี่ปุน (JIRA : Japanese Industrial Robot Association) ดังนี้
• ระดับที่ 1 กลไกที่ถูกควบคุมดวยมนุษย (manual-handling device)
• ระดับที่ 2 หุนยนตที่ทํางานตามแผนลวงหนาที่กําหนดไว โดยไมสามารถปรับเปลี่ยนแผนงานได
(fixed-sequence robot)
• ระดับที่ 3 หุนยนตที่ทํางานตามแผนลวงหนาที่กําหนดไว โดยสามารถปรับเปลี่ยนแผนงานได
(variable-sequence robot)
• ระดับที่ 4 ผูควบคุมเปนผูสอนงานใหกับหุนยนต หุนยนตจะทํางานเลนยอนกลับ ตามที่หนวยความจํา
บันทึกไว (playback robot)
• ระดับที่ 5 ผูควบคุมบันทึกขอมูลเชิงตัวเลขการเคลื่อนที่ใหกับหุนยนต หุนยนตสามารถทํางานไดเอง
โดยไมตองทําการสอนงาน (numerical control robot)
• ระดับที่ 6 หุนยนตมีความฉลาด สามารถเรียนรูสภาพแวดลอม และตัดสินใจทํางานไดดวยดวยเอง
(intelligent robot)
แตสถาบันหุนยนตแหงสหรัฐอเมริกา (RIA : The Robotics Institute of America) พิจารณาเพียงระดับที่ 3-
6 เทานั้นที่ถือวาเปนหุนยนต
หุนยนตยังสามารถจําแนกเปน 2 ประเภทใหญๆ ตามลักษณะการใชงาน คือ
• หุนยนตชนิดติดตั้งอยูกับที่ (fixed robot) หุนยนตประเภทนี้ มีลักษณะเปนแขนกล สามารถขยับและ
เคลื่อนไหวไดเฉพาะขอตอ นิยมใชในโรงงานอุตสาหกรรม
• หุนยนตชนิดเคลื่อนที่ได (mobile robot) หุนยนตประเภทนี้ สามารถขยับเคลื่อนที่ไปไดดวยตัวเอง
โดยการใชลอ ขา หรือการขับเคลื่อนในรูปแบบอื่นๆ
- 2. หุนยนต มาจากคําวา “โรบอท” (robot หรือ robota) ในภาษาเช็ก ซึ่งแปลวา ทาส หรือผูถูก
บังคับใชแรงงาน ในป ค.ศ.1921 (พ.ศ.2464) คารล ชาเพต (Karel Capek) นักประพันธชาวเช็ก ไดประพันธ
ละครเวทีเรื่อง อาร.ยู.อาร. (R.U.R. : Rossum's Universal Robots) โดยในละครนั้นมีเนื้อหาเกี่ยวกับมนุษยที่
ตองการทาสรับใช จึงสรางหุนยนตขึ้นมาชวยทํางาน ซึ่งตอมาหุนยนตไดพัฒนาตัวเองใหมีความฉลาดมากขึ้น
จึงเกิดความคิดตอตานมนุษย ไมยอมใหกดขี่ขมเหงอีกตอไป ละครเรื่องนี้โดงดังมากจนทําใหคําวา “โรบอท”
เปนที่รูจักไปทั่วโลก
ตอมาในป ค.ศ.1942 (พ.ศ.2485) ไอแซค อสิมอฟ (Isaac Asimov) นักวิทยาศาสตรและนักประพันธ ชาว
- 3. อเมริกัน เชื้อสายรัสเซีย ไดประพันธนวนิยายเชิงวิทยาศาสตรเรื่อง รันอะราวน (Runaround) โดยมีเนื้อหา
เกี่ยวกับหุนยนต และกําหนดกฎ 3 ขอของหุนยนตขึ้นในงานประพันธของเขา ประกอบดวย
1. หุนยนตหามทํารายมนุษย หรือนิ่งเฉยปลอยใหมนุษยตกอยูในอันตราย
2. หุนยนตตองเชื่อฟงคําสั่งมนุษย ยกเวนคําสั่งนั้นขัดแยงกับกฎขอแรก
3. หุนยนตปกปองตัวเองได แตตองไมขัดกับกฎขอแรกหรือกฎขอที่สอง
หลังจากบทประพันธของอสิมอฟเผยแพรออกไป กฎ 3 ขอนี้ก็ไดรับการสนับสนุนจากผูคนเปนจํานวนมาก
เนื่องจากเปนกฎที่มีความถูกตอง และอยูบนพื้นฐานความปลอดภัยในการดํารงชีวิตรวมกันระหวางมนุษยกับ
หุนยนต นวนิยายเรื่องนี้ทําใหนักวิทยาศาสตรสนใจหุนยนตมากขึ้น และเริ่มตนการพัฒนาหุนยนตอยางจริงจัง
ตั้งแตนั้นเปนตนมา
ประวัติ และพัฒนาการของหุนยนต
หุนยนตมีเรื่องราวมายาวนานตั้งแตยุคโบราณ แตจะอยูในเรื่องเลาของตํานานปรัมปราเสียเปนสวนมาก
เชนในสมัยกรีกโบราณมีตํานานของ ทาลอส (Talos) หุนยนตทหารยามผูพิทักษเกาะครีต ทําหนาที่ปองกัน
การบุกรุกของศัตรู และขัดขวางมิใหพลเมืองออกจากเกาะโดยมิไดรับราชานุญาตจากกษัตริยไมนอส ในตํานาน
กลาววา ทาลอสคือรูปปนทองเหลืองที่ถูกราดดวยน้ําศักดิ์สิทธิ์จึงสามารถเคลื่อนไหวได แมวาจะไมไดกลาวถึง
กลไกขับเคลื่อน แตก็เปนภาพลักษณตนแบบของหุนยนตจนถึงทุกวันนี้
มนุษยไดมีการประดิษฐ อุปกรณกลที่เคลื่อนไหวไดมานานมากแลว โดยในสมัยโบราณชาวกรีกจะ
เรียกวา ออโตมาตา (automata) ซึ่งเปนที่มาของคําวา "อัตโนมัติ" (autonomous) ในปจจุบันนั่นเอง
ออโตมาตาชิ้นแรกของโลกเทาที่มีหลักฐานบันทึกไว เกิดขึ้นเมื่อประมาณ 400 ปกอนคริสตกาล (พ.ศ.
143) โดย อารคายทาส (Archytas of Tarentum) นักคณิตศาสตรและนักประดิษฐชาวกรีก ไดประดิษฐ
นกพิราบกล (Pigeon) ที่สามารถบินและขยับปกขึ้นลงได โดยอาศัยแรงขับเคลื่อนจากไอน้ํา
ออโตมาตาที่ทํางานครบสมบูรณรุนแรกเกิดขึ้นเมื่อประมาณ 250 ปกอนคริสตกาล (พ.ศ.293) โดย ทซิ
บิอุส (Ctesibius of Alexandria) นักคณิตศาสตรและนักประดิษฐชาวกรีก ไดประดิษฐนาฬิกาน้ําที่เรียกวา
เครปไซดรา (Clepsydra) ซึ่งบอกเวลาโดยระดับน้ํา และใชหลักการของกาลักน้ําเติมน้ําอยูตลอดเวลา ทําให
นาฬิกาน้ําสามารถทํางานไดใหมโดยอัตโนมัติ
- 4. ในชวงคริสตศตวรรษที่ 1 (พ.ศ.543-643) เฮรอน (Heronof Alexandria) นักคณิตศาสตรและนัก
ประดิษฐชาวกรีก ไดสรางอุปกรณขึ้นมากมาย หนึ่งในนั้นคืออุปกรณที่ขับเคลื่อนดวยไอน้ํา (Aeolipile) หรือ
เครื่องจักรเฮรอน ซึ่งถือเปนเครื่องจักรไอน้ําตัวแรกของโลก
ป ค.ศ.1206 (พ.ศ.1749) นักนักประดิษฐชาวมุสลิมชื่อ อัล-จาซารี (Al-jazari) ไดออกแบบเรือที่มีวง
ดนตรีหุนกลนั่งเลนดนตรีอยูขางใน 4 ตัว เพื่อถวายความบันเทิงแกบรรดาแขกของเชื้อพระวงศ โดยการ
ขับเคลื่อนของหุนกลนั้นใชพลังงานจากน้ํา และสามารถปรับเปลี่ยนจังหวะการทํางานของหุนตีกลองไดโดยการ
ยายหมุดไปยังตําแหนงที่แตกตางกัน
- 5. ป ค.ศ.1495 (พ.ศ.2038) ไดพบหลักฐานการออกแบบหุนยนตคลายมนุษย (humnoid) ตัวแรกของ
โลก จากบันทึกของ ลีโอนารโด ดาวินชี (Leonardo da Vinci) ศิลปนและนักประดิษฐชาวอิตาลี เปนภาพราง
ของหุนยนตอัศวินที่มีรายละเอียดกลไกอยูภายใน ซึ่งสามารถขยับแขนและศรีษะได แตก็ไมมีใครทราบแนชัด
วาหุนยนตที่ออกแบบนี้ไดถูกสรางขึ้นมาหรือไม
ป ค.ศ.1737 (พ.ศ.2280) จารค เดอ ฟูคอนซอน (Jacques de Vaucanson ) นักประดิษฐชาว
ฝรั่งเศส ไดสรางหุนยนตเปาฟลุต (Flute Player) ที่เปาฟลุตออกมาเปนเพลงไดถึง 12 เพลงอยางไพเราะ โดย
มีการขยับนิ้วมือที่ทําดวยไมและมีปอดเทียมในการขับลมมาเปาฟลุต และใน 2 ปถัดมาจารค เดอ ฟูคอนซอน
ไดสรางหุนยนตเลนแทมโบลีน (Tambourine Player) และหุนยนตเปด (Digesting Duck) ที่มีกลไก
เคลื่อนไหวกวา 400 ชิ้น สามารถที่จะขยับปก แสดงทาทางการกิน ยอย(บดเมล็ดพันธุพืช) และขับถายได ซึ่ง
ถือวาเปนหุนยนตยุคใหมที่สามารถทํางานไดจริงเปนตัวแรกของโลก
- 6. หุนยนตเคลื่อนที่ไดตัวแรกของโลกเกิดขึ้นในชวงสงครามโลกครั้งที่สองหรือในชวงป ค.ศ.1939-2045
(พ.ศ.2482-2588) ในรูปแบบของระเบิดบิน (flying bomb) ที่มีความฉลาด อาศัยอุปกรณตรวจรูหรือ
เซ็นเซอร (sensor) เปนตัวควบคุมการจุดระเบิด
ในชวงป ค.ศ.1948-1949 (พ.ศ.2491–2492) วิลเลี่ยม เกรย วอลเทอร (William Grey Walter) ชาว
อเมริกัน สรางหุนยนตอัตโนมัติที่มีรูปรางคลายเตาเรียกวา แมคินา สเปคคูลาทริกซ (Machina Speculatrix)
ชื่อ เอลเมอร (Elmer) และเอลซี่ (Elsie) จากมอเตอรไฟฟา มีลอ 3 ลอเพื่อใชในการเคลื่อนที่ และมีอุปกรณ
ตรวจรูแสง หุนยนตทั้งสองตัวถูกตั้งการทํางานใหวิ่งเขาหาแสง และมีความสามารถที่จะเคลื่อนที่หลบเลี่ยงสิ่ง
กีดขวางได นับวาเปนหุนยนตตัวแรกที่เคลื่อนที่ไดดวยตัวเอง
- 7. ในป ค.ศ.1960 (พ.ศ.2503) มหาวิทยาลัยจอนสฮอปกินส (Johns Hopkins University) ไดพัฒนา
หุนยนตชื่อ บีสท (Beast) ที่มีอุปกรณตรวจรูแสง และระบบการสะทอนของคลื่นเสียงโซนาร (sonar) ชวยใน
การนําทาง โดยหุนยนตสามารถที่จะเคลื่อนที่ไปมาไดอยางอิสระ และกลับมาเติมพลังงานเขาสูแบตเตอรี่ได
ดวยตัวเอง
หุนยนตอุตสาหกรรมตัวแรกของโลก ถือกําเนิดขึ้นในป ค.ศ.1961 (พ.ศ.2504) โดย จอรจ ดีวอล
(George Devol) และ โจเซฟ เอ็นเกลเบอรเกอร (Joseph Engelberger) วิศวกรชาวอเมริกัน ทั้งสองได
ประดิษฐแขนกลหุนยนต สําหรับใชในงานอุตสาหกรรมชื่อ ยูนิเมท (Unimate) และเปดตัวบริษัทสรางหุนยนต
แหงแรกของโลกชื่อ ยูนิเมชั่น (Unimation) โดยตอมาโจเซฟไดรับสมญานามวา “บิดาแหงหุนยนตดาน
อุตสาหกรรม”
- 8. ป ค.ศ.1966 (พ.ศ.2509) เชกกี้ (Shakey) หุนยนตเคลื่อนที่ตัวแรกของโลกที่มีความคิดเปนของ
ตัวเอง พัฒนาโดยสถาบันวิจัยสแตนฟอรด (SRI : Stanford Research Institute) ไดถือกําเนิดขึ้น เชกกี้มี
ระบบคอมพิวเตอรที่ใชในการประมวลผลภาพ (image processing) และอุปกรณตรวจรูเปนเครื่องบอกนําทาง
ในการเคลื่อนที่
ป ค.ศ.1970 (พ.ศ.2513) หุนยนตชื่อ ลูนาโคตร-วัน (Lunokhod 1) สรางโดยสหภาพโซเวียต
(ปจจุบันคือประเทศรัสเซีย) เปนหุนยนตควบคุมจากระยะไกลตัวแรกของโลกที่ขึ้นไปสํารวจสภาพพื้นผิวของ
ดวงจันทร ตัวหุนยนตประกอบดวยลอทั้งหมด 8 ลอ มีอุปกรณตรวจรูตางๆเชน กลองโทรทัศน 4 ตัว อุปกรณ
ตรวจรูรังสีคอสมิกและรังสีเอ็กซ (cosmic-ray, X-ray) เปนตน หุนยนตลูนาโคตร-วัน ถูกออกแบบใหสามารถ
นําพลังงานจากแสงอาทิตยมาใชเปนพลังงานในการขับเคลื่อนได
- 9. ป ค.ศ. 1977 (พ.ศ. 2520) ภาพยนตรเรื่องสตารวอร (Star Wars) ไดสรางจินตนาการถึงหุนยนตที่
สามารถเคลื่อนที่ไดอยางอัตโนมัติชื่อ อารทูดีทู (R2D2) และหุนยนตคลายมนุษยชื่อ ซีทรีพีโอ (C3PO)
ภาพยนตรเรื่องนี้โดงดังมาก จนทําใหคนรูจักและสนใจหุนยนตมากขึ้น
20 ปหลังจากที่หุนยนตอุตสาหกรรมตัวแรกของโลกไดถือกําเนิดขึ้นในประเทศสหรัฐอเมริกา แตหุนยนตกลับ
ไดรับการพัฒนา และเติบโตอยางมากในประเทศญี่ปุน ในชวงการปฏิวัติอุตสาหกรรม การขยายตัวของ
อุตสาหกรรมทําใหหุนยนตถูกนํามาใชอยางแพรหลายเพื่อทดแทนแรงงานคน และเพิ่มผลผลิต เชน
อุตสาหกรรมยานยนต และอุตสาหกรรมเครื่องใชไฟฟา
- 10. หุนยนตมักถูกใชในงานที่เสี่ยงอันตราย หรืองานที่ตองการความแมนยําและความละเอียดสูง ในชวง
แรกหุนยนตจะยังขาดความสามารถในการเรียนรู และทํางานไดอยางจํากัดโดยอาศัยการรับคําสั่งจากมนุษย
แตตอมาความสามารถของหุนยนตกลับเพิ่มขึ้นอยางทวีคูณ เมื่อโลกไดกาวเขาสูยุคอินเตอรเน็ต (internet)
ตั้งแต ค.ศ.1990 (พ.ศ.2533) เปนตนมา หุนยนตมีความสามารถ และแข็งแกรงมากขึ้นจากวิทยาการดาน
คอมพิวเตอร วัสดุและโลหะ ความรูที่มนุษยสั่งสมมานานสามารถถายทอดสูสมองกลของหุนยนตไดภายใน
เสี้ยววินาที
ในป ค.ศ.1997 (พ.ศ.2540) ความชาญฉลาดของมนุษยถูกทาทายจากปญญาประดิษฐ (artificial
intelligence) แกรี่ กาสปาโรฟ (Garry Kasparov) แชมปหมากรุกโลกชาวรัสเซีย สูญเสียชัยชนะใหกับสมอง
กลที่ชื่อ ดีพบลู (Deep Blue) ชึ่งพัฒนาโดยมหาวิทยาลัยคารเนกีเมลลอน (Carnegie Mellon University)
และบริษัทไอบีเอ็ม (IBM) สมองกลรุนใหมนี้ทําใหหุนยนตมีการทํางานที่รวดเร็วมากขึ้น สามารถทํางานไดดวย
การวิเคราะหขอมูลภายในสมองกลของหุนยนตเอง โดยไมตองอาศัยการตัดสินใจจากมนุษย
- 11. ในปเดียวกันนั้นเอง โซเจอรเนอร (Sojourner) หุนยนตจากโลกเหยียบดาวอังคารเปนครั้งแรก รับ
หนาที่ในการถายภาพพื้นผิว และเก็บตัวอยางหิน ในโปรเจ็กส พาธฟายนเดอร (Pathfinder) ขององคการ
บริหารการบินและอวกาศแหงชาติ (NASA: National Aeronautics and Space Administration)
หุนยนตไดถูกพัฒนาความสามารถทางกายภาพ และความคิดขึ้นอยางตอเนื่อง บทบาทของหุนยนตได
เปลี่ยนจากเครื่องจักรกลที่ทํางานไดอยางแมนยําในโรงงานอุตสาหกรรม เปนหุนยนตที่มีอารมณและความรูสึก
ในป ค.ศ.1999 (พ.ศ.2542) หุนยนตสุนัข ไอโบ (Aibo) พัฒนาโดยบริษัทโซนี่ (Sony) ประเทศญี่ปุน สรางขึ้น
ใหมีลักษณะเหมือนสัตวเลี้ยง มีความรูสึกตอบสนอง เพื่อใหสามารถเปนเพื่อนกับมนุษยได
- 12. ในป ค.ศ.2000 (พ.ศ.2543) บริษัทฮอนดา (Honda) ประเทศญี่ปุนไดพัฒนาหุนยนตเดินสองขาคลาย
มนุษย (humanoid) มาจนถึงรุนที่ 11 โดยใชเวลาในการคนควาและวิจัยถึง 14 ป รูจักกันในชื่อวา อซิโม
(ASIMO) อซิโมถูกวางใหเปนหุนยนตที่สามารถทํางานรับใชมนุษยได เปนเพื่อนที่แสนดี และยังเปนมิตรคูคิด
ของมนุษยอีกดวย
ในชวงป ค.ศ.2003-2004 (พ.ศ.2546–2547) สํานักพัฒนาวิจัยภายใตกระทรวงกลาโหมสหรัฐอเมริกา
(DARPA : Defense Advanced Research Projects Agency) ไดเสนอใหมีการแขงขันรถยนตที่สามารถ
เคลื่อนที่ไดเองโดยไมมีคนขับ โดยกําหนดใหรถขับผานทะเลทรายระยะทาง 131 ไมล ภายในรถจะติดตั้ง
อุปกรณตรวจรูตางๆ ซึ่งสามารถรับรูถึงสภาพถนน การจราจร รวมถึงอุปสรรคกีดขวางตางๆ บนถนนและ
รอบๆตัวรถไดเปนอยางดี และมีสมองกลคอมพิวเตอรไวประมวลผลจากอุปกรณตรวจรูตางๆ ที่สงเขามาอยาง
ชาญฉลาด ทําใหรถสามารถวิ่งถึงจุดหมายได