Downloaded 86 times

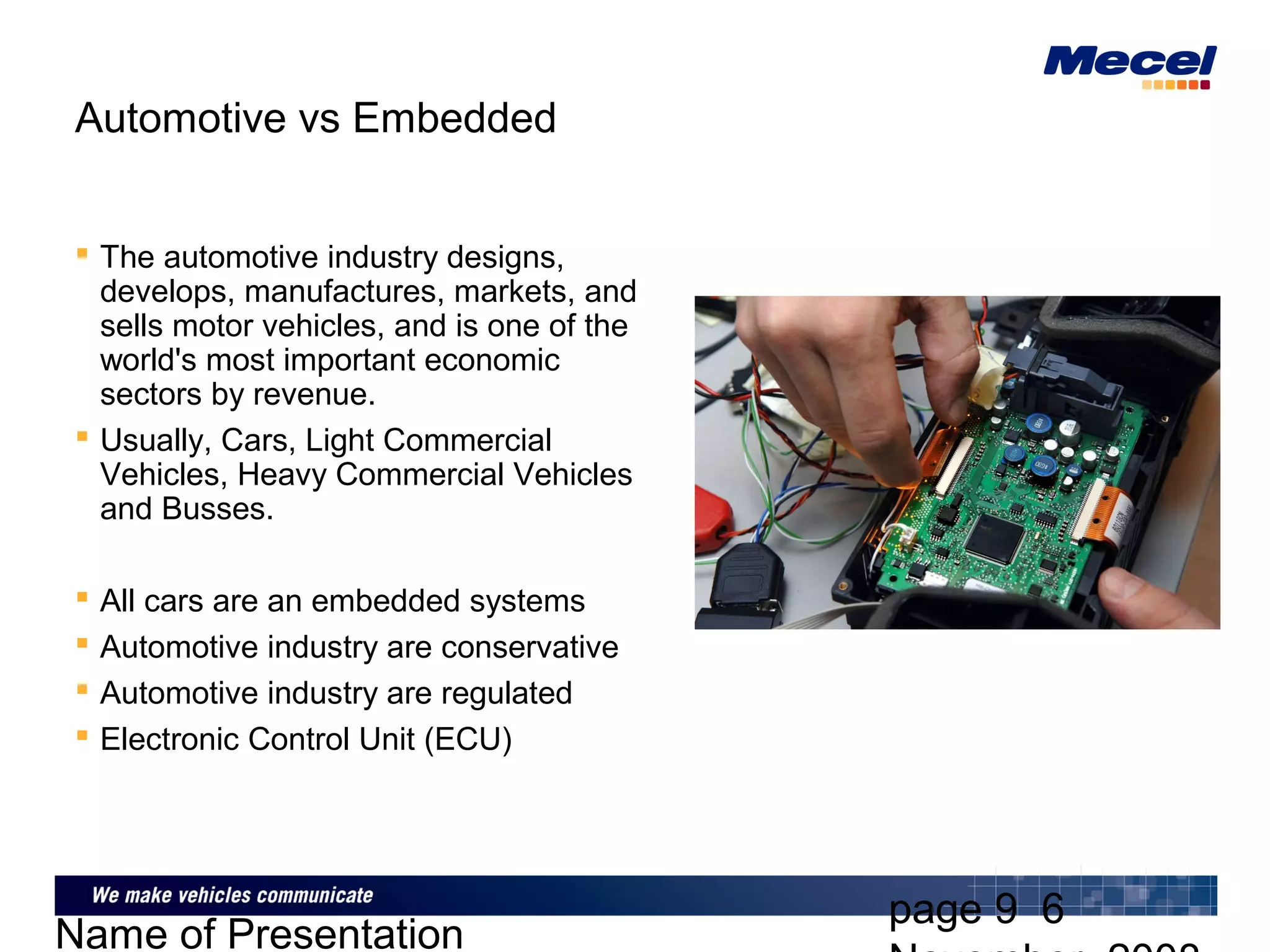

The document discusses the characteristics and requirements of embedded systems, particularly in the automotive environment, highlighting differences from conventional computers. It covers various automotive applications, real-time computing constraints, and optimization techniques for Linux kernel startup. Additionally, it presents examples of automotive solutions and systems, including infotainment platforms and communication nodes.





































































































