
Recommended
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Hybrid Stochastic Search Technique based Suboptimal AGC Regulator Design for Power System using Constrained Feedback Control Strategy
Similar to Hybrid Stochastic Search Technique based Suboptimal AGC Regulator Design for Power System using Constrained Feedback Control Strategy (20)
Recently uploaded
Recently uploaded (20)
Hybrid Stochastic Search Technique based Suboptimal AGC Regulator Design for Power System using Constrained Feedback Control Strategy
- 1. Hybrid Stochastic Search Technique based Suboptimal AGC Regulator Design for Power System using Constrained Feedback Control Strategy International Conference on ICMOC’ 2010 Organized by EE Deptt., NIT (Durgapur) W.B. Corresponding Author: O. V. Singh Department of Electrical Engineering Maharishi Markandeshwar University, Mullana Ambala, Haryana-133207,
- 2. CONTENTS ABSTRACT INTRODUCTION SUBOPTIMAL PI REGULATOR DESIGN GENETIC ALGORITHM- SIMULATED ANNEALING (GASA) BASED SUBOPTIMAL REGULATOR DESIGN RESULTS AND DISCUSSION CONCLUSION REFERENCES
- 3. ABSTRACT A new hybrid stochastic search technique is proposed to design of suboptimal AGC regulator for a two area interconnected non reheat thermal power system incorporating DC link in parallel with AC tie-line. In this technique, we are proposing the hybrid form of Genetic Algorithm (GA) and simulated annealing (SA) based regulator. GASA has been successfully applied to constrained feedback control problems where other PI based techniques have often failed. The main idea in this scheme is to seek a feasible PI based suboptimal solution at each sampling time. The feasible solution decreases the cost function rather than minimizing the cost function.
- 4. INTRODUCTION Automatic generation control is one of the most important issues in electric power system operation and control. The main objective of AGC in an interconnected power system is to maintain frequency of each area and to keep tie-line power close to the scheduled values by adjusting the real power outputs of the generators so as to accommodate fluctuating load demands [1-4]. From the work reported so far, it has been observed that the availability of an accurate model of the system under study plays a crucial role in the development of the most control strategies like optimal, suboptimal, adaptive control etc [4]. An interconnected power system contains different kinds of uncertainties due to changes in system parameters and characteristics, loads variation, therefore the operating points of a power system may change very much randomly during a daily cycle.
- 5. Continue… All the reported methods are mostly time based on the state-space approach and require information about the system states, which are not usually known or available (Optimal Techniques). Suboptimal control technique does not require complete information about the system. so, this technique is better than Optimal control strategies. Recent days; Genetic Algorithm, Particle Swarm Optimization, Fuzzy Algorithm, Neural Network based methods and their hybrid forms [4] to design Optimal AGC schemes. We are proposed a new Stochastic Search Technique, involving a synergistic combination of Genetic Algorithm (GA) and Simulated Annealing (SA) is used to get the suboptimal constrained feedback gains of the PI regulator.
- 6. Continue… This approach used on the suboptimal constrained feedback of state variables available as output variables and structures of ‘Q’ matrix for AGC regulator. A two area non-reheat type power system model interconnected via parallel EHVAC/HVDC links is considered for the study. The system dynamic performance has been obtained with the implementation of designed AGC regulator considering 2% load perturbation in either of the areas. The effect of the constrained and without constrained feedback control strategy in the power systems is also presented.
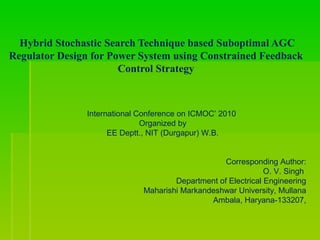
- 7. FIGURE 1: Transfer Function Model of Interconnected Power Systems Consisting of Non-Reheat Turbines 1 / R1 ∆Pc1 Kg1 ( 1+sTg1) Kt1 ( 1+sTt1) ∆Pg2 T12 / s 1 / R2 Kp2 (1+sTp2) Kg2 ( 1+sTg2) Kt2 ( 1+sTt2) ∆Ptie + + a12 ∆Pdc2 ∆Xg2 _ _ _ + _ ∆Pc2 Kdc 1+sTdc B1 1/s B2 ∫ACE1 dt 1/s + ∆Xg1 ∆Pg1 ∆Pdc1 Kp1 (1+sTp1) ∆Pd1 - - - ∆Pd2 ∆F2 - + _ ∫ACE2 dt + ∆F1 a12 + + a12 + + + ∆Pdc AREA -1 AREA -2
- 8. SUBOPTIMAL PI REGULATOR DESIGN A 2-area interconnected power system is described by a completely controllable and observable linear time-invariant state space representation as given by the following differential equations: d/dt [x(t)] = A x(t) + B u(t) + Γ d(t) (1) y(t) = C x(t) (2) where, x(t) is a vector of system states, u(t) is a vector of control inputs, and y(t) is a vector of measured outputs, and A, B, C and Γ are matrices of compatible dimensions. Output feedback control strategies [3] use only selected subsets of the state variables for feedback purposes. When designing a suboptimal AGC regulator, constraints are imposed on the structure of the feedback matrix so as to affect the feedback of the desired state variables only.
- 9. Continue… output variables: u(t) = Ke Ye(t) (3) Where Ke is an output feedback control matrix to be determined. This law may also be expressed in terms of the state variables as: u(t) = Ke CeXe(t) (4) The control laws defined by equations (3) or alternatively (4) are equivalent if and only if the following constraint is satisfied: Γe = Ke Ce (5) Accordingly, the output feedback control problem may now be stated as that of finding an output feedback control matrix Ke subject to constraints (5). The method is based on the following theorem [2], which is presented for the determination of such an output feedback control matrix.
- 10. State Space Model of the power systems The state space representation of the systems under consideration may be given by the following equation 1. State Vector x(t)=[ΔPtieΔF1ΔPg1ΔXg1∫ACE1dtΔF2ΔPg2ΔXg2∫ACE2dtΔPdc] Control Vector u(t) = [ΔPc1 ΔPc2] Disturbance Vector P(d) = [ΔPd1 ΔPd2] Output Vector Y(t) = [ΔPtie ΔF1 ∫ACE1 ΔF2 ∫ACE2] The Design of suboptimal AGC regulator based on constrained and without constrained feedback control strategy using ‘Qc’ [3] and ‘Q’ is a 10x10 identity matrix. The System data are given in the APPENDIX.
- 11. System Coefficient Matrices The structure of state, control and disturbance matrices (A, B, and Г) may be derived from the model. The control cost-weighting matrix ‘R’ is a 2x2 dimensional identity matrix. The state cost weighting matrix Qc is designed based on the concept of controllability and observability.
- 12. GENETIC ALGORITHM- SIMULATED ANNEALING (GASA) BASED SUBOPTIMAL REGULATOR DESIGN The GASA heuristic incorporates Simulated Annealing (SA) in the selection criteria of Genetic Algorithm (GA) [5-6]. The solution string comprises of suboptimal using only feedback of states which are available as output should be incorporated while dealing with suboptimal control problems. Its gains are encoded as a string of real numbers. The GASA heuristic employs Blend crossover and a mutation operator suitable for real number representation to provide it a better search capability. The objective is to minimize the Tie-line power flows augmented with penalty terms corresponding to transient response specifications in the regulator output and frequency.
- 13. Flow Chart: GASA Technique based Suboptimal AGC Regulator using constrained feedback control strategy
- 14. RESULTS FIGURE 3: Response of change in F1 FIGURE 4: Response of change in F2 FIGURE 5: Response of change in IACE
- 15. DISCUSSION For the simulation study, MATLAB-7.8 software is used. The step load perturbation is 2% at area-1 in the power system model study. FIGURE 3 to 5 shows the dynamic response curves of change in frequency of the area-1, area-2 and tie line power flows of the power system with and without constrained respectively compared with the proposed suboptimal control. It is clear from the overshoots and settling times in GASA case is very much less than those obtained by suboptimal PI regulator with constrained PI(C) and without constrained PI. The results gives that the settling time of PI suboptimal regulators is 50% longer than the proposed regulator’s.
- 16. CONCLUSION It has been reported that the proposed control technique is effective and provides significant improvement in the system performance. In addition, the proposed suboptimal regulator is very simple and easy to implement since it does not require complete information about system states. Therefore, the proposed regulator fulfills the necessity of the two area interconnected power system. The results obtained have been compared with those obtained from PI based suboptimal AGC regulator cases. The system states for PI suboptimal regulator also checked for constrained and without constrained matrices of the system. Hence, the proposed GASA suboptimal regulator is recommended to generate good quality and secure electric power.
- 17. APPENDIX Nominal Parameters of Thermal System Investigated: f= 50, Pr1 = Pr2 = 2000, H1 = H2 = 5, Tt1= Tt2 = 0.3, Tg1 = Tg2 = 0.08 , Kp1 = Kp2 = 1,Kg1= Kg2= 1, D1= D2= 8.33 10-3 , a12 = -1, R1= R2=2.4, Ptiemax = 200, B1 = B2 = 0.425, δ1 - δ2= 30 0 , 2πT12= 0.545, Kdc= 1, Tdc= 0.2 Parameters used for GASA: Number of Parents=100, Number of Children=10, Max. number of Iterations=200, Crossover Probability=0.6, Mutation Probability=0.01
- 18. REFERENCES 1. M. Athans and P. Falb, Optimal Control: An introduction to the theory and its application, McGraw-Hill, New York, 1966. 2. B. C. Moore, “Principle components analysis in linear system: controllability, observability, and model reduction”, IEEE Trans. Automatic Control, AC-26(1), pp. 17-31, 1981. 3. Naimul Hasan, “Suboptimal automatic generation control strategies in interconnected power system with ac/dc links,” Ph.D. Thesis, Deptt. of Electrical Engg., Jamia Millia University, New Delhi, India, 2008. 4. Ibraheem, P. Kumar and Kothari, “Recent philosophies of automatic generation control strategies in power systems”, IEEE Trans. Power System, vol. 11, no. 3, pp. 346-357, February 2005. 5. D.Bhagwan Das, C. Patvardhan,” Reactive Power Dispatch with a hybrid stochastic search technique”, International Journal of Electrical Power and Energy Systems, 24(2002) 731-736. 6. Omveer Singh, D. Bhagwan Das,” Design of Optimal State Feedback Controller for AGC using a Hybrid Stochastic Search”, IEEE Conference, POWERCON 2008, India.
- 19. THANK YOU!