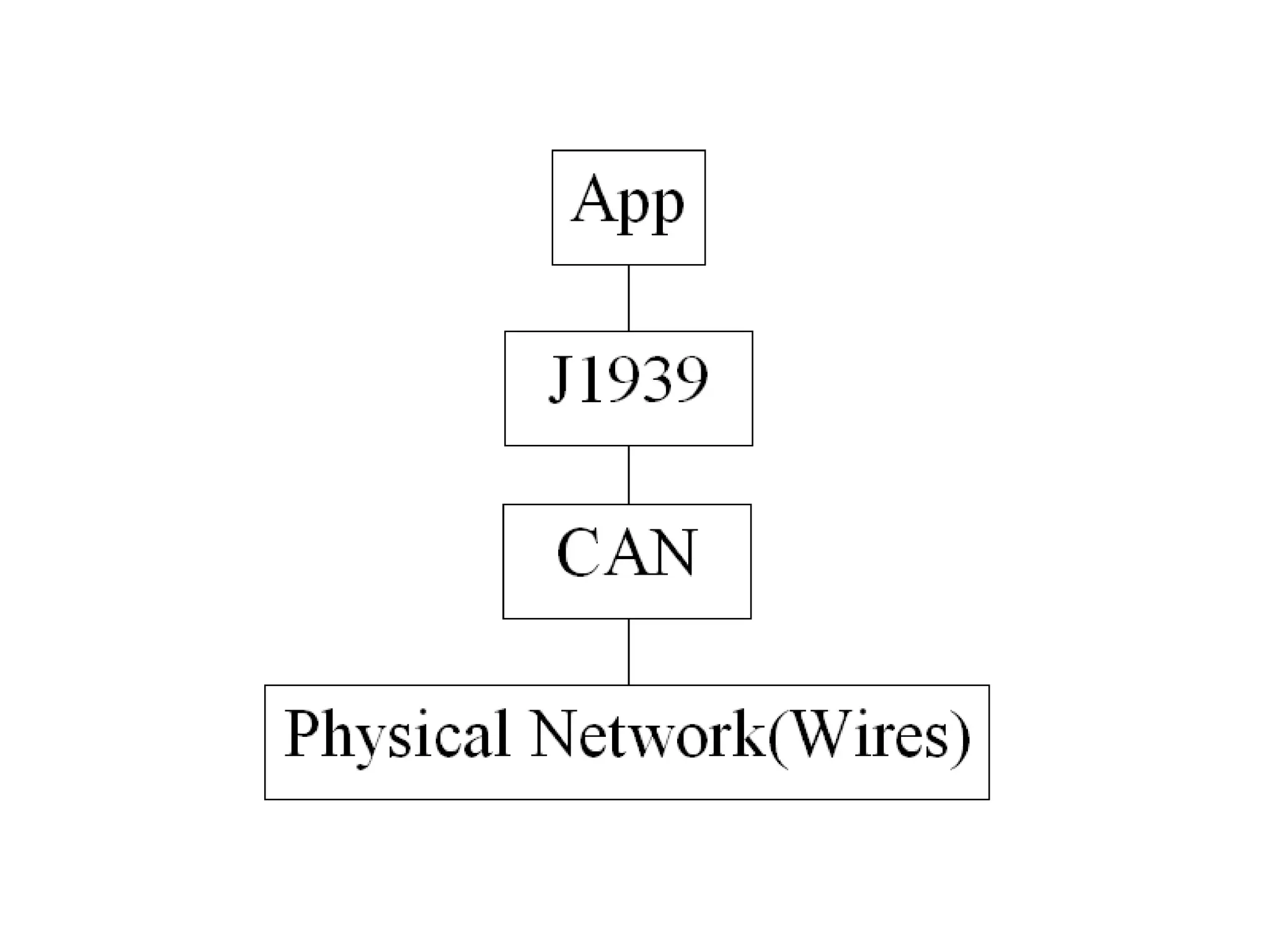
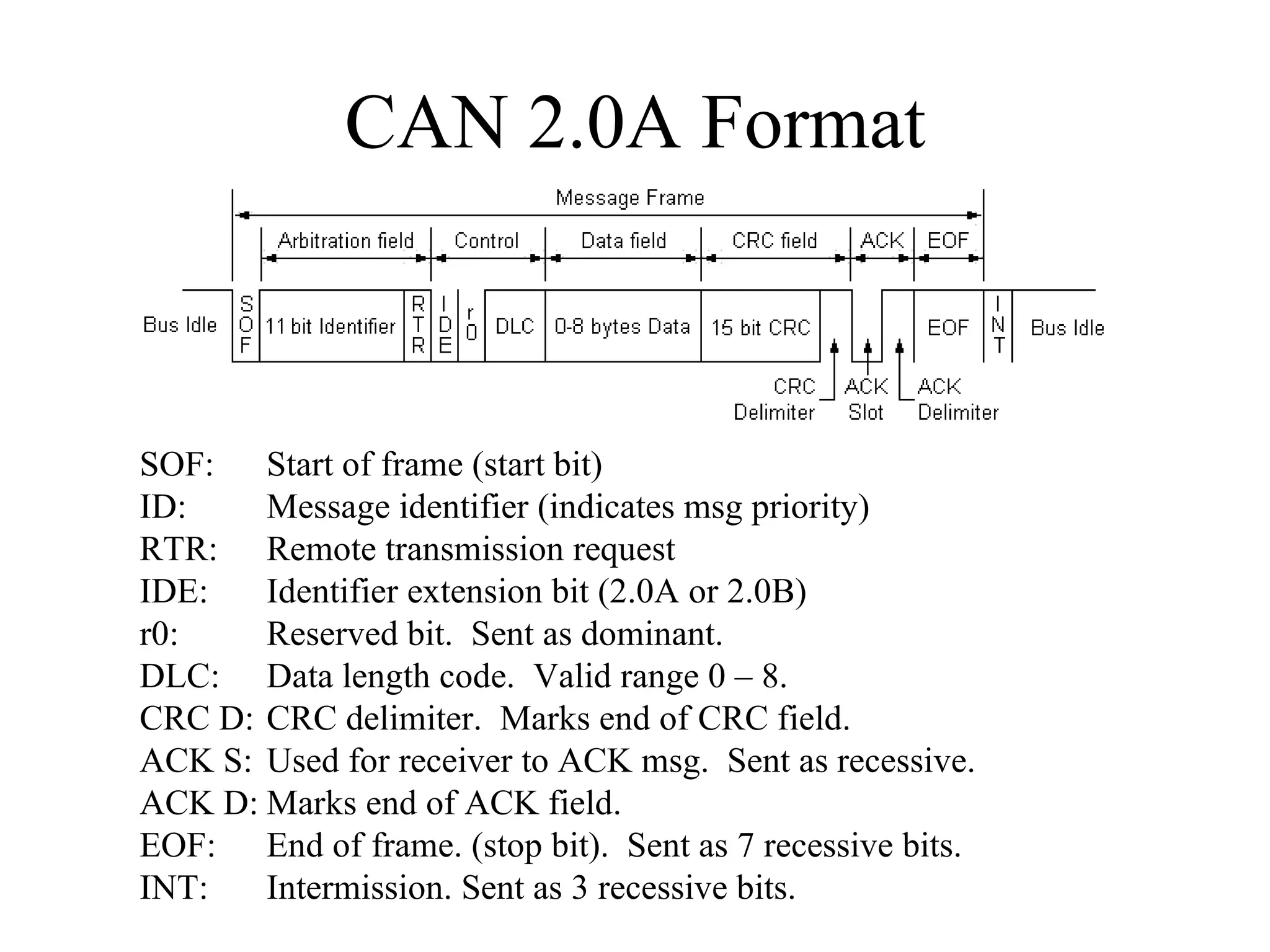
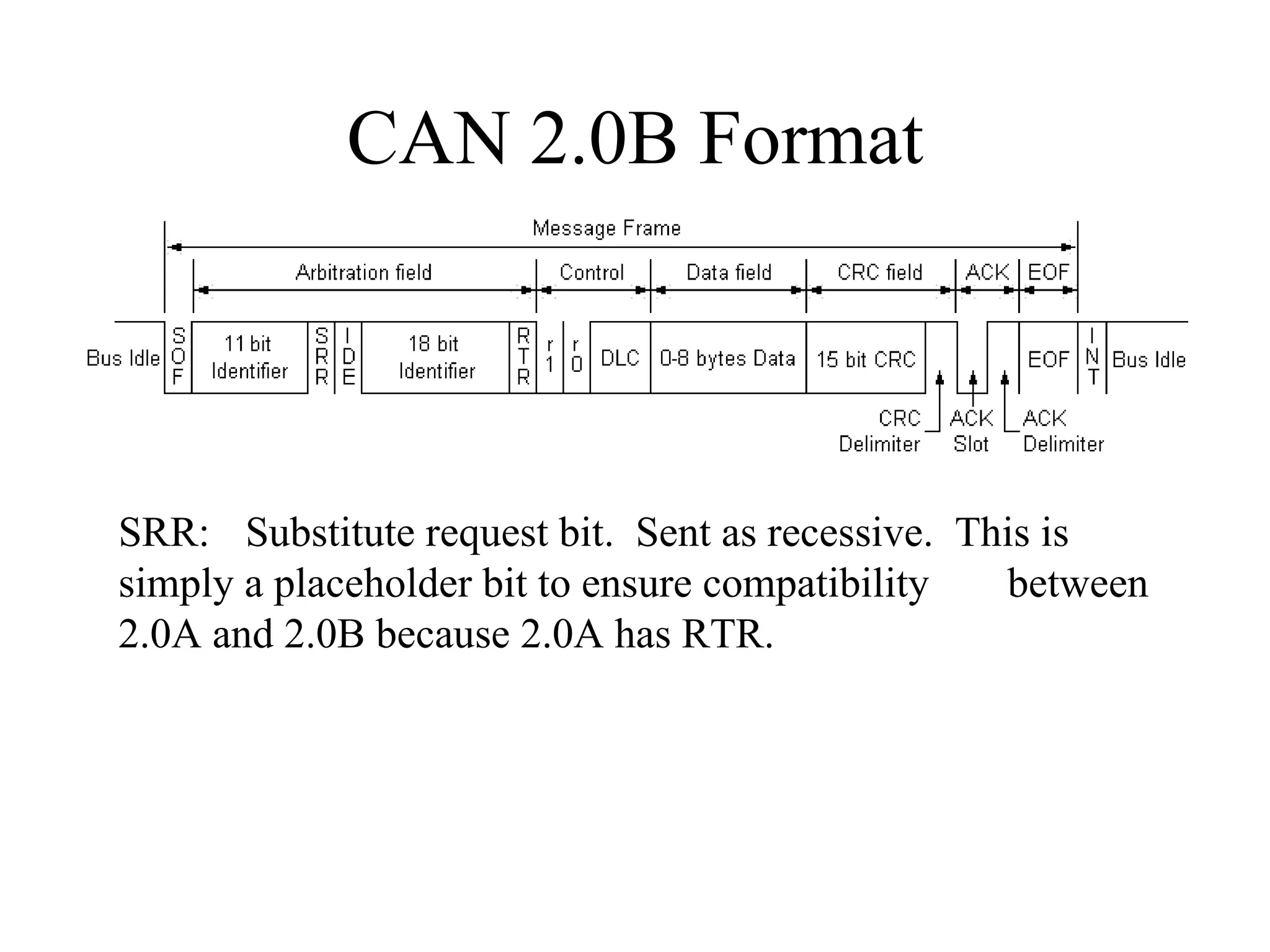
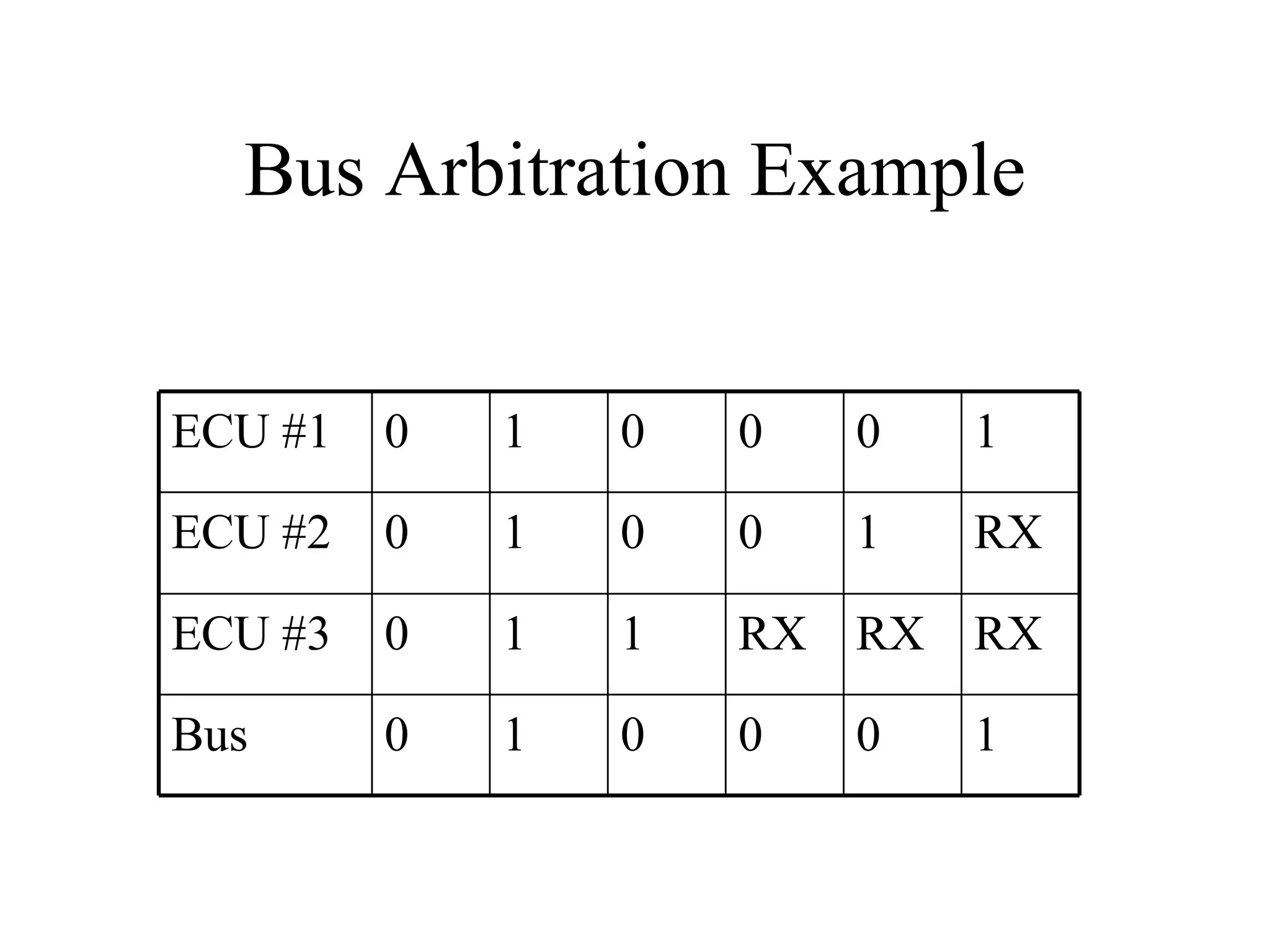
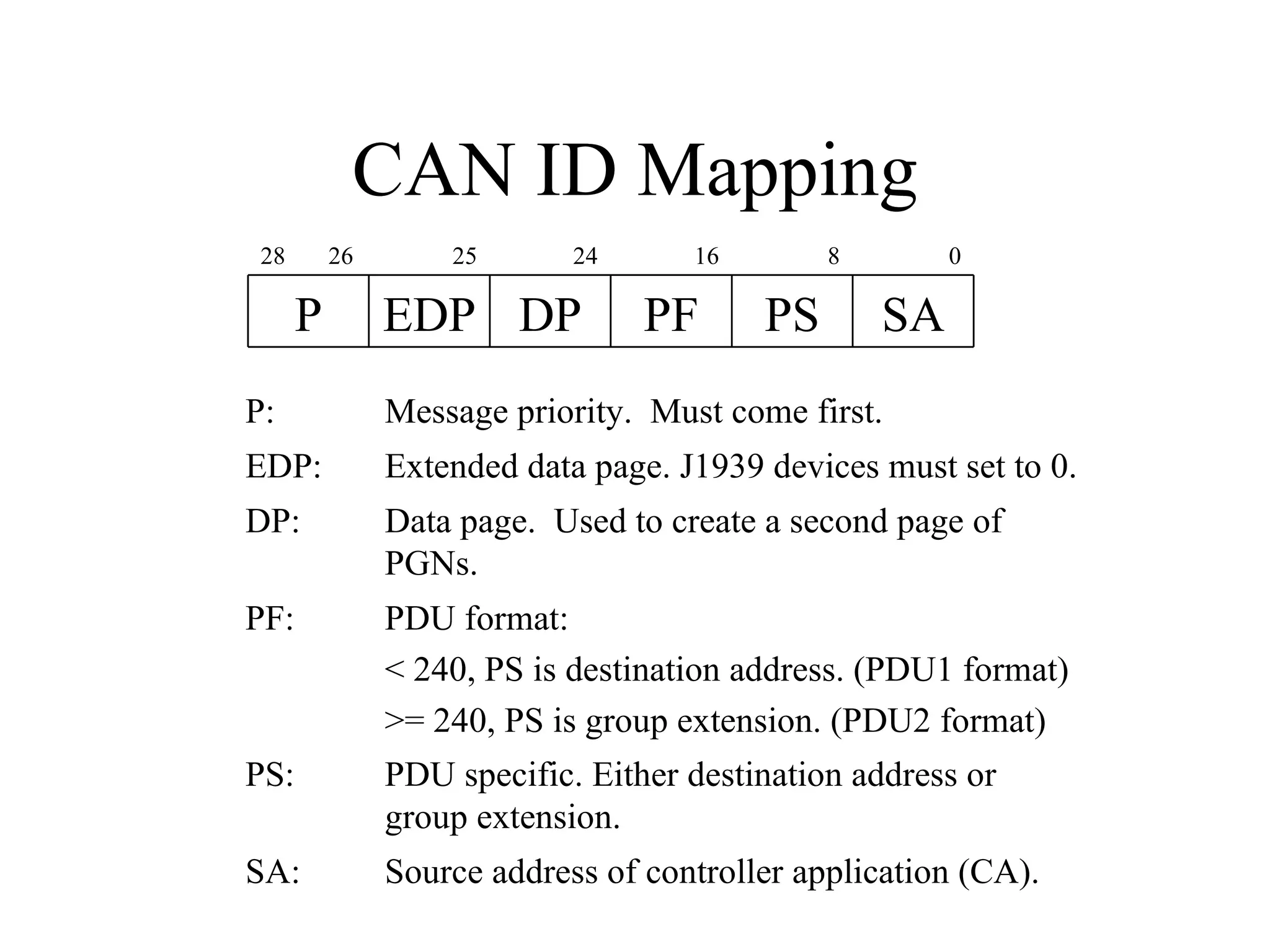
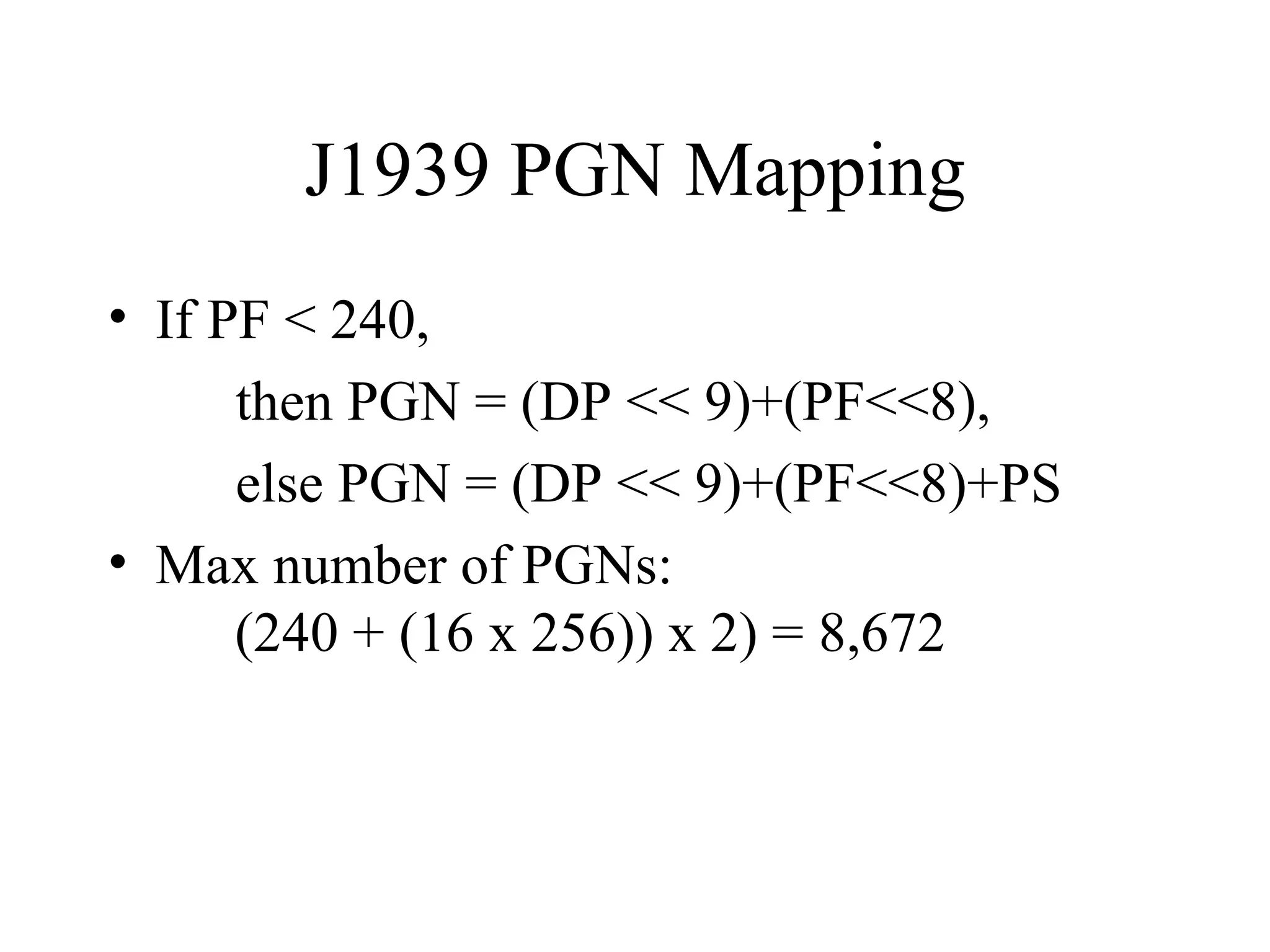
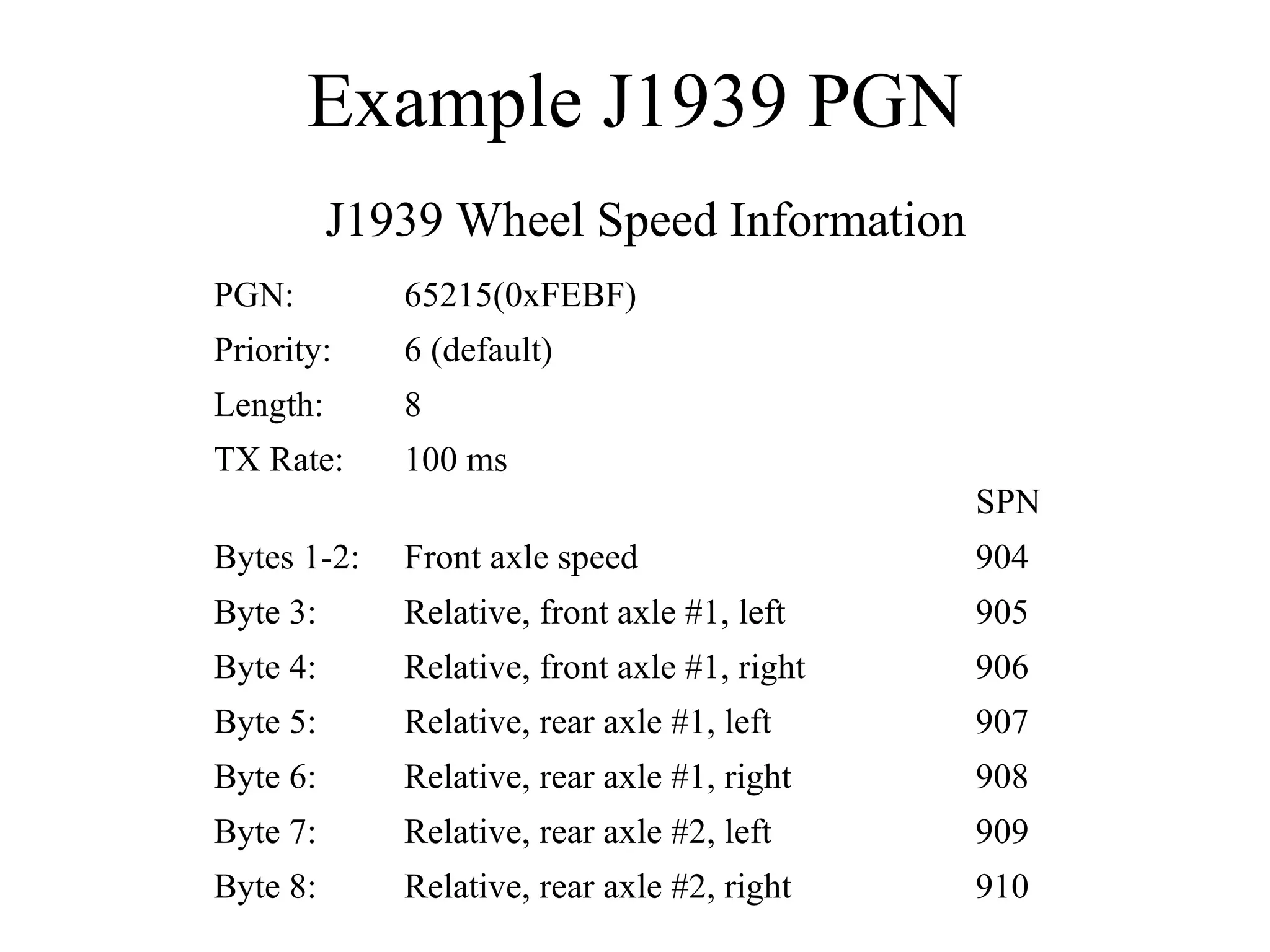
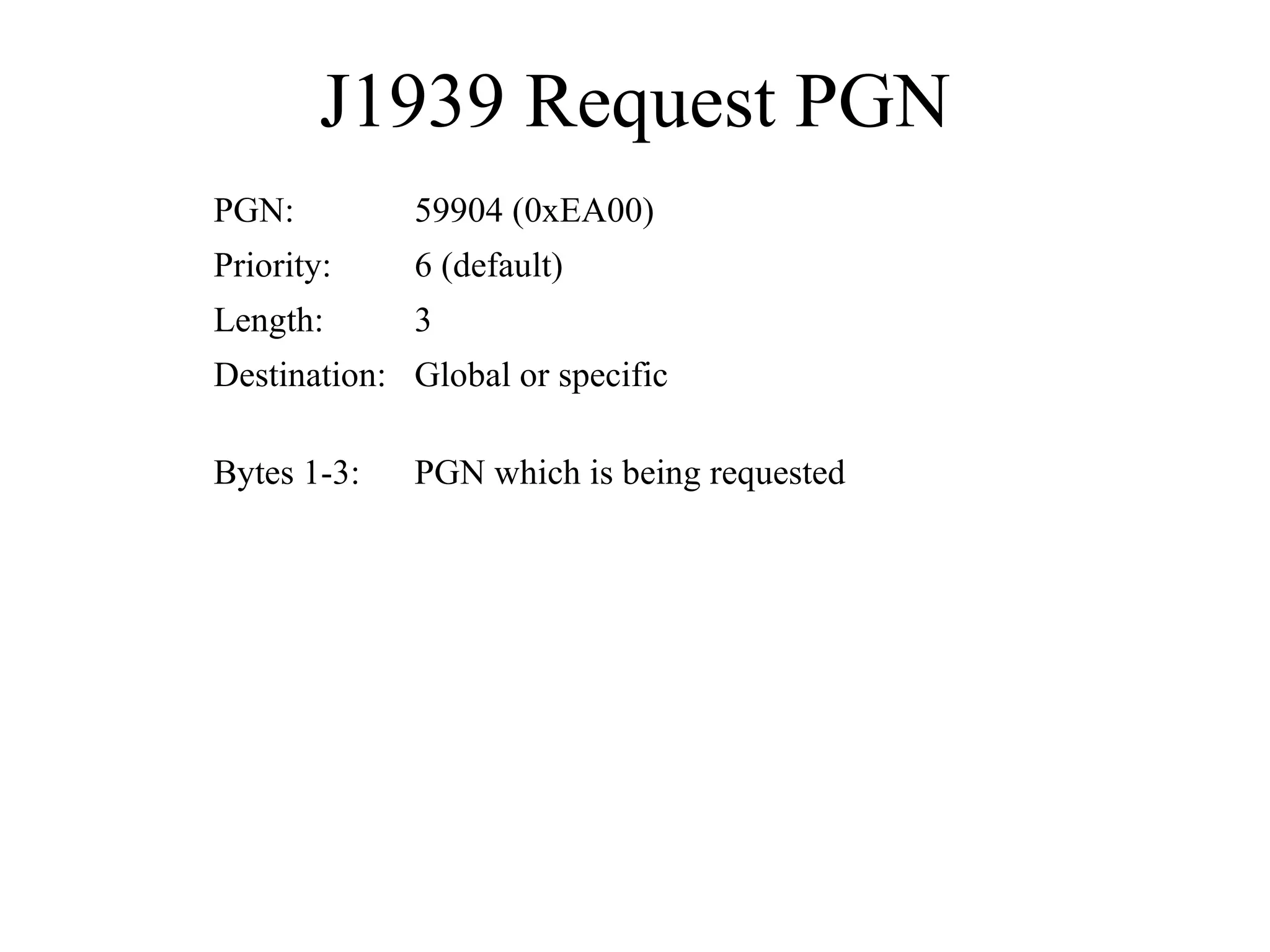
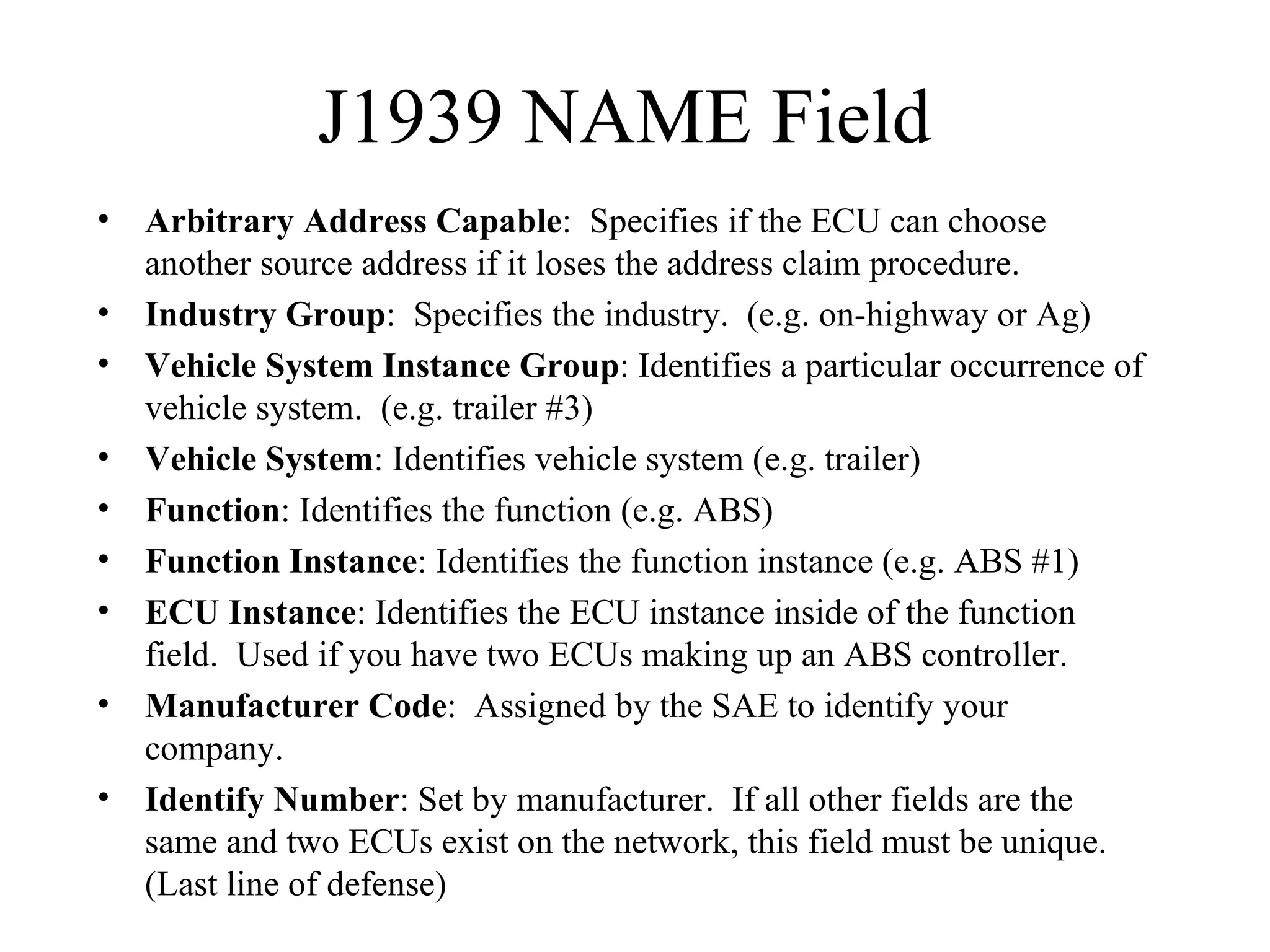
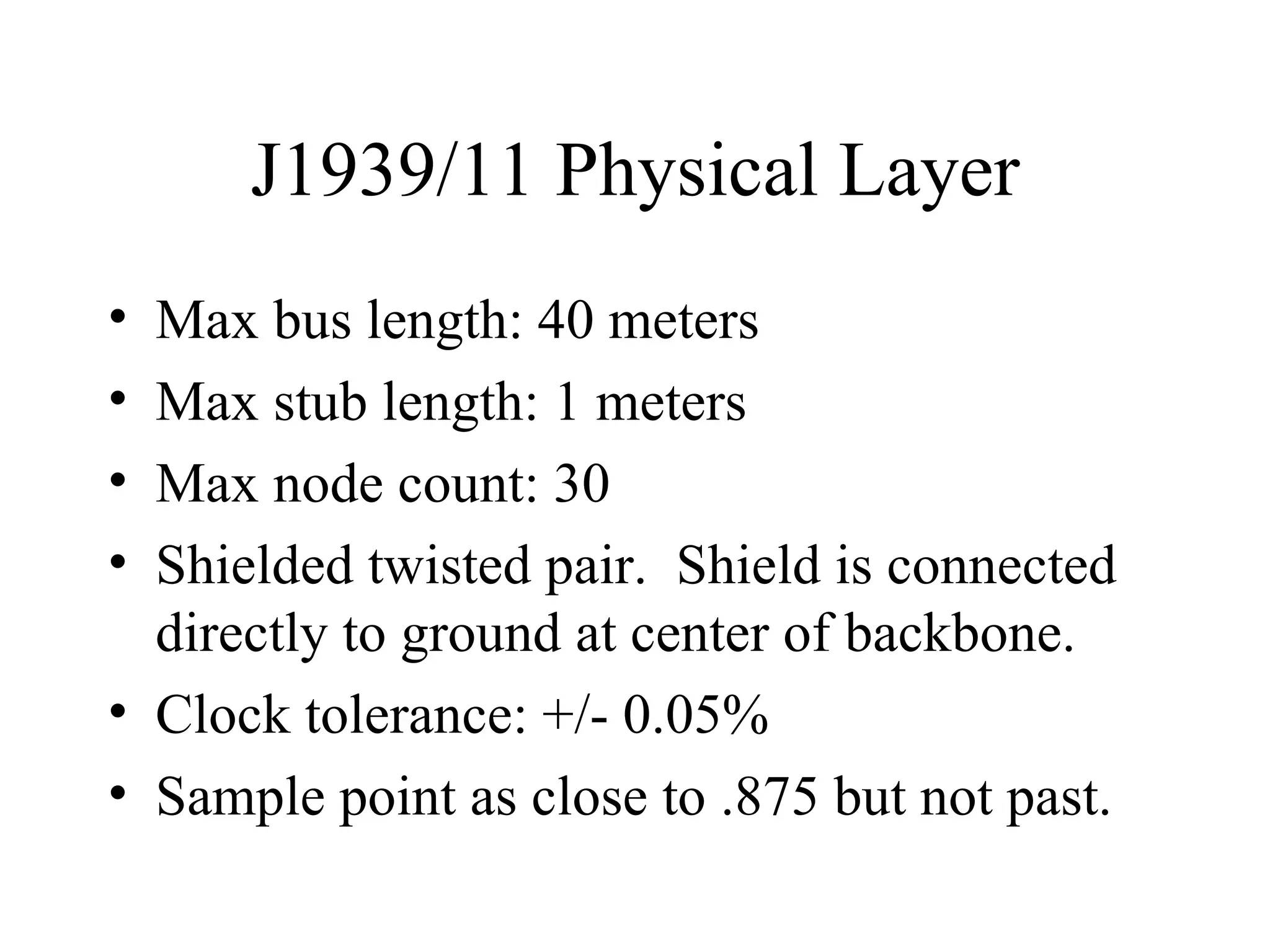
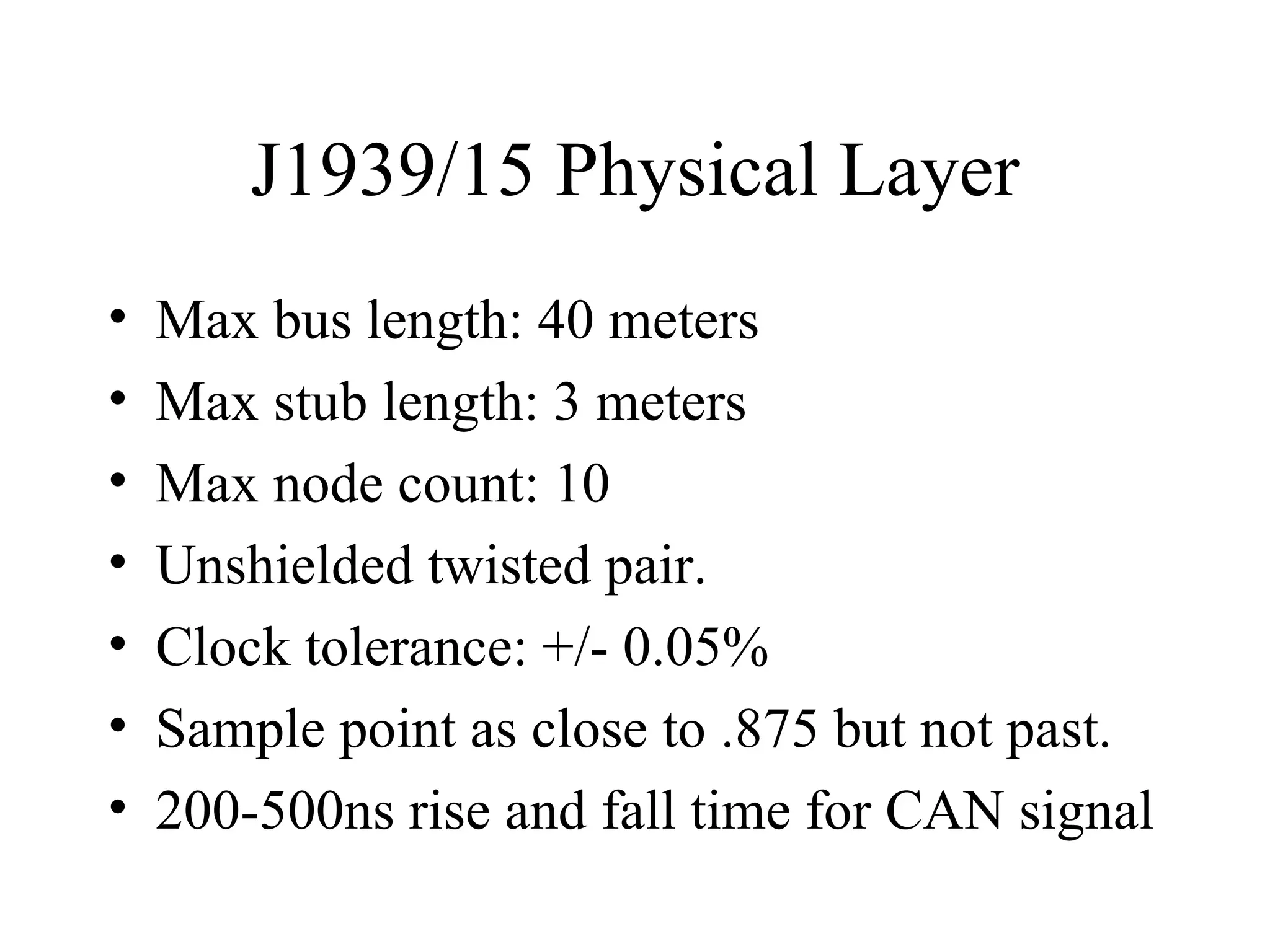
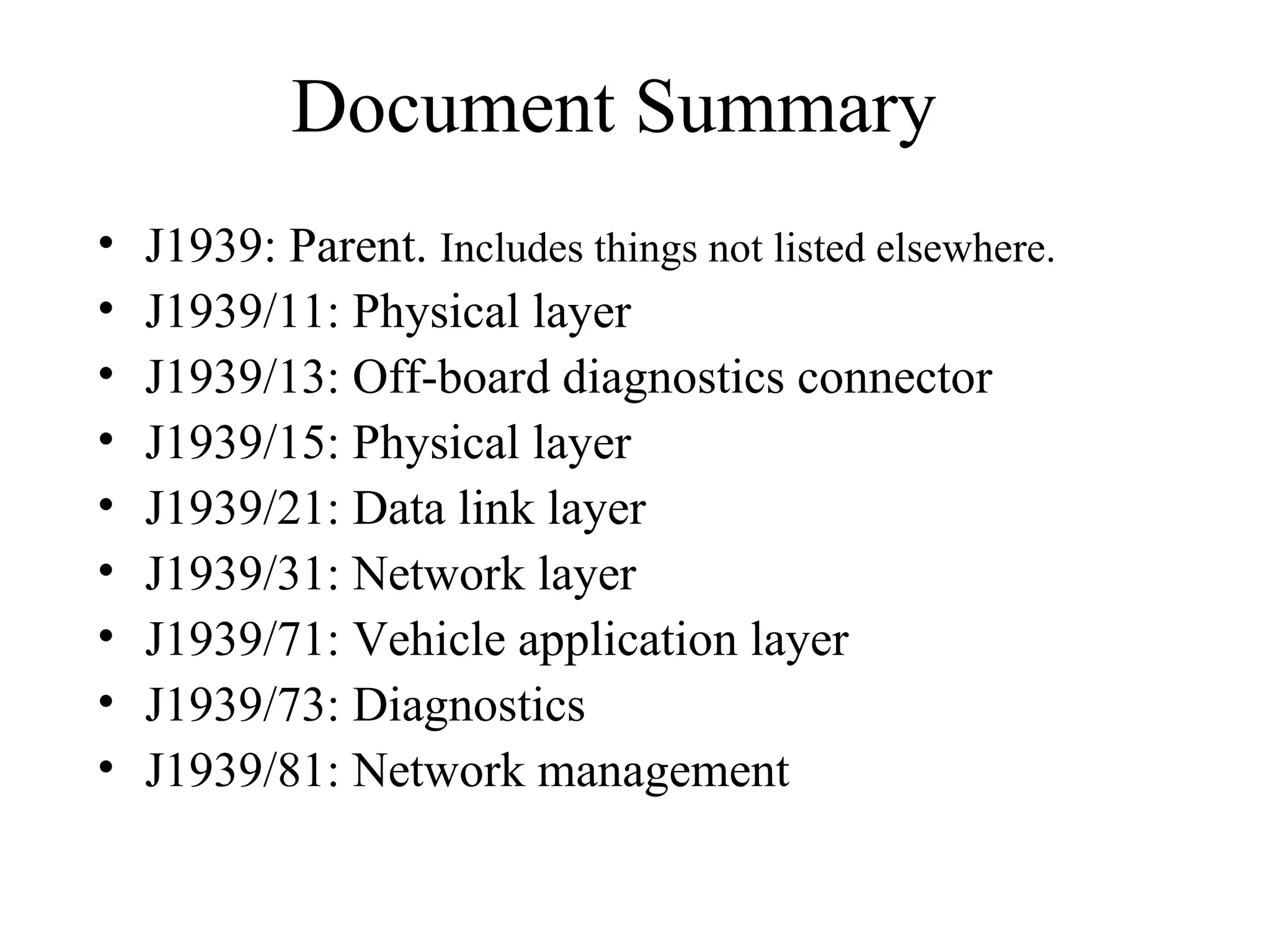

J1939 is a standard that defines how information is transferred across a network to allow vehicle ECUs to communicate. It uses the CAN bus protocol and message identifiers called PGNs to send data. The standard includes specifications for the physical layer, data link layer, and other aspects. It is used widely in commercial vehicles to allow sharing of data like wheel speeds, engine data, and diagnostic information between vehicle systems. Questions about any aspect of the J1939 standard are welcome and the instructor provided contact information for follow up.












































![1. SIH2025-IDEA-Presentation-Format[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/1-251204091914-b1bb69d5-thumbnail.jpg?width=640&height=640&fit=bounds)


