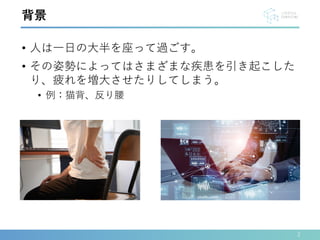
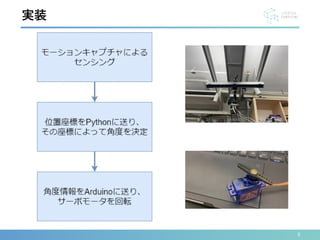
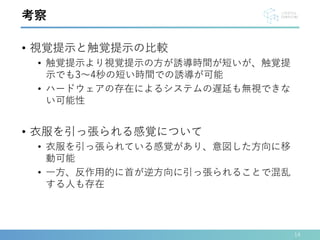
• 椅子の座面の下に空気で膨らむクッションが入って
おり、それが膨らんだり縮んだりする。
• 座面の傾きが変化
5
[1]Kazuyuki Fujita, Aoi Suzuki, Kazuki Takashima, Kaori Ikematsu, and Yoshifumi Kitamura. 2021. TiltChair: Manipulative Posture Guidance by Actively Inclining the
Seat of an Office Chair. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems (CHI '21). Association for Computing Machinery, New
York, NY, USA, Article 228, 1–14. https://doi.org/10.1145/3411764.3445151
関連研究:TiltChair[1]
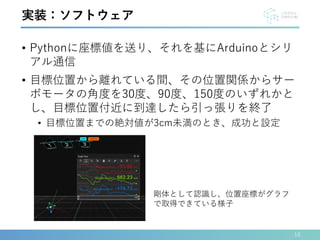
6.
• スクリーン自体を動かすことで自然に姿勢を誘導
6
[2] Joon-GiShin, Eiji Onchi, Maria Jose Reyes, Junbong Song, Uichin Lee, Seung-Hee Lee, and Daniel Saakes. 2019. Slow Robots for Unobtrusive Posture Correction. In
CHI Conference on Human Factors in Computing Systems Proceedings (CHI 2019), May 4–9, 2019, Glasgow, Scotland UK. ACM, New York, NY, USA, 10 pages.
https://doi.org/10.1145/3290605.3300843
関連研究:SlowRobots[2]



![• 椅子の座面の下に空気で膨らむクッションが入って
おり、それが膨らんだり縮んだりする。
• 座面の傾きが変化
5
[1] Kazuyuki Fujita, Aoi Suzuki, Kazuki Takashima, Kaori Ikematsu, and Yoshifumi Kitamura. 2021. TiltChair: Manipulative Posture Guidance by Actively Inclining the
Seat of an Office Chair. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems (CHI '21). Association for Computing Machinery, New
York, NY, USA, Article 228, 1–14. https://doi.org/10.1145/3411764.3445151
関連研究:TiltChair[1]](https://image.slidesharecdn.com/sig-demo-221103060338-021ae680/85/slide-5-320.jpg)
![• スクリーン自体を動かすことで自然に姿勢を誘導
6
[2] Joon-Gi Shin, Eiji Onchi, Maria Jose Reyes, Junbong Song, Uichin Lee, Seung-Hee Lee, and Daniel Saakes. 2019. Slow Robots for Unobtrusive Posture Correction. In
CHI Conference on Human Factors in Computing Systems Proceedings (CHI 2019), May 4–9, 2019, Glasgow, Scotland UK. ACM, New York, NY, USA, 10 pages.
https://doi.org/10.1145/3290605.3300843
関連研究:SlowRobots[2]](https://image.slidesharecdn.com/sig-demo-221103060338-021ae680/85/slide-6-320.jpg)















![[FIT2025 トップコンファレンスセッション]EarHover: ヒアラブルデバイスにおける音漏れ信号を用いた空中ジェスチャ認識](https://cdn.slidesharecdn.com/ss_thumbnails/fit2025-presentationv2-251006033725-c7651715-thumbnail.jpg?width=640&height=640&fit=bounds)













