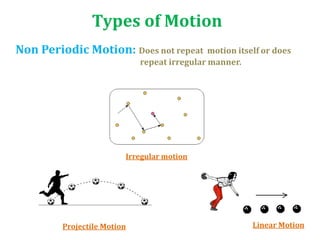
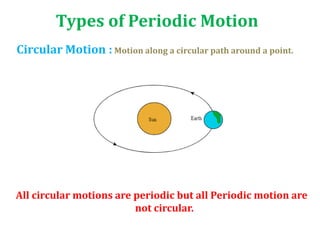
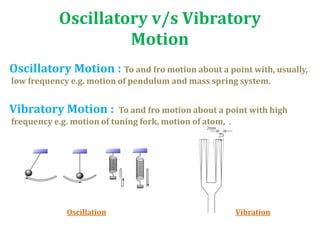
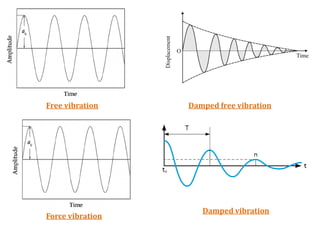
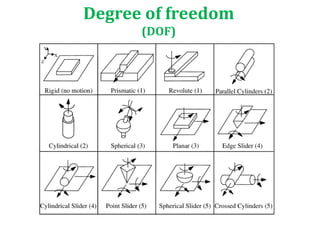
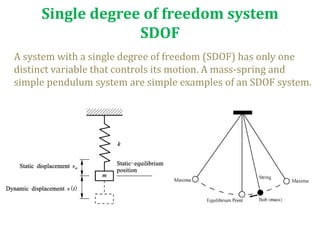
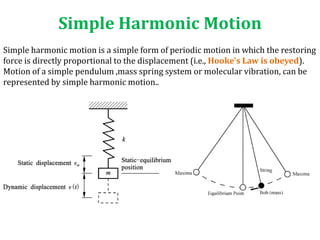
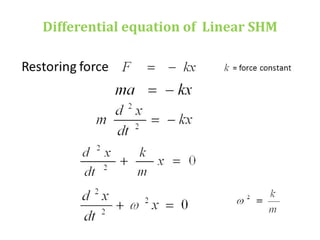
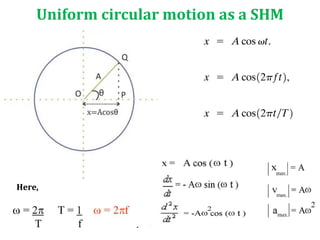
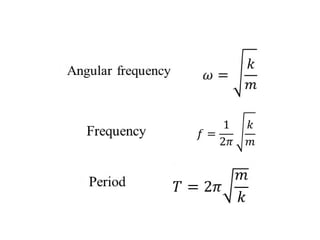
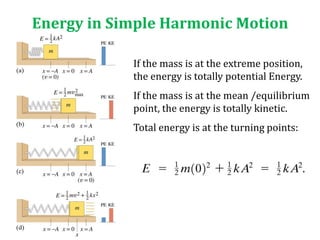
The document discusses types of motion, focusing on periodic and non-periodic motions, and outlines characteristics of periodic motion including time period, frequency, amplitude, and degrees of freedom. It explains simple harmonic motion (SHM), its relationship to Hooke's law, and the concepts of potential and kinetic energy in vibratory systems. Additionally, it covers forced vibrations and resonance, detailing the impact of external forces on system behavior.