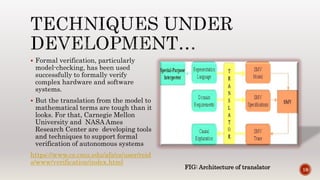
The document discusses various formal verification techniques that can be used to verify autonomous robotic systems, including model checking, theorem proving, runtime monitoring, and integrated formal methods. It describes how each technique works at a high level and notes their advantages and disadvantages. The document also discusses challenges in applying these techniques to complex robotic systems and efforts to develop tools and frameworks to facilitate the formal verification process.


![ MODELLING REAL-TIME
SOFTWARE
C/C++ FUNCTIONS.
MODELS CAN BE VERFIIED
USING D-FINDER TOOL
14
[1]](https://image.slidesharecdn.com/verification-191121214729/85/verification-of-autonomous-robotic-system-14-320.jpg)
![ VERIFYING TEMPORAL
PROPERTIES OF PROGRAMS.
CAN OUTPUT VERILOG AND C
CODE
15
[1]](https://image.slidesharecdn.com/verification-191121214729/85/verification-of-autonomous-robotic-system-15-320.jpg)