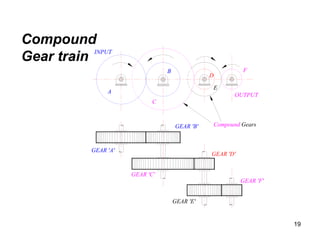
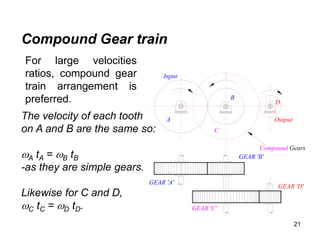
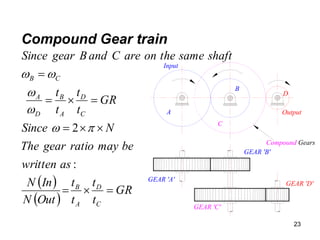
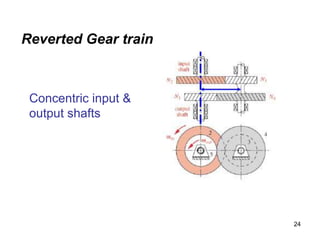
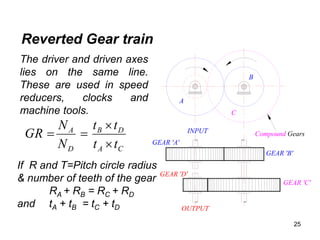
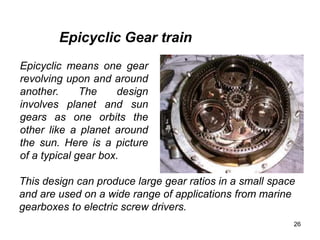
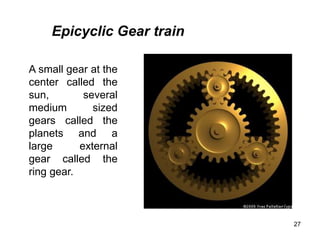
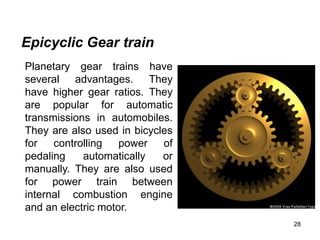
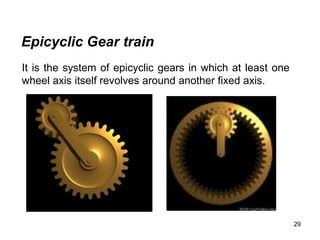
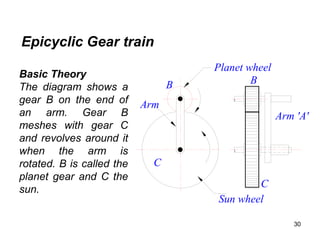
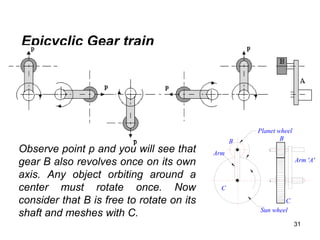
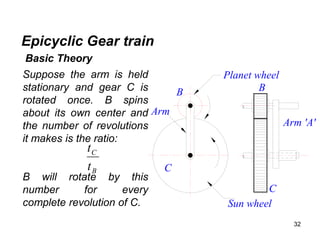
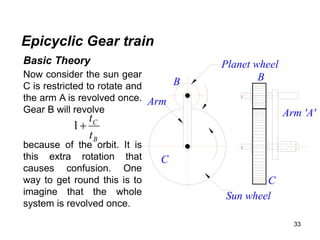
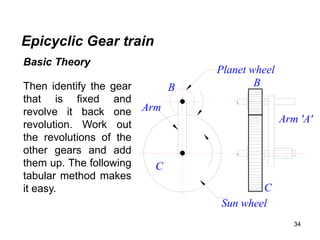
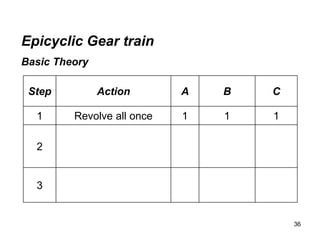
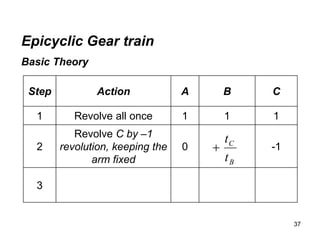
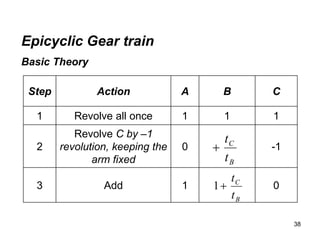
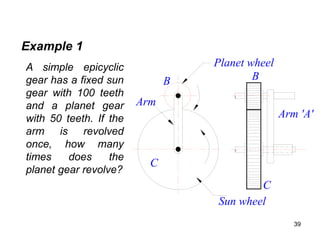
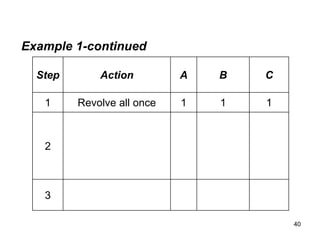
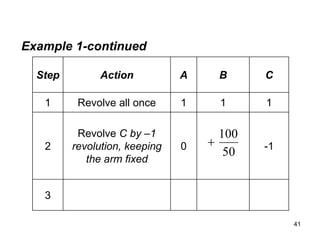
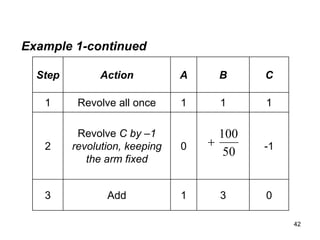
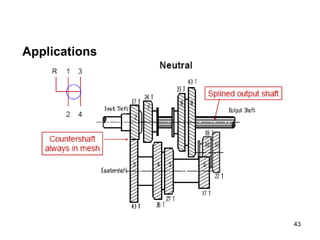
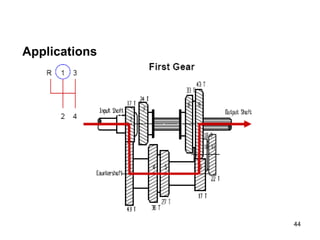
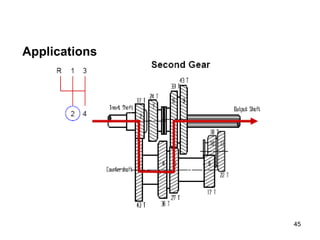
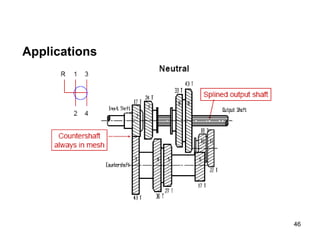
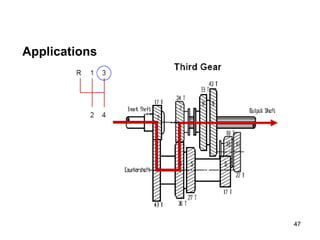
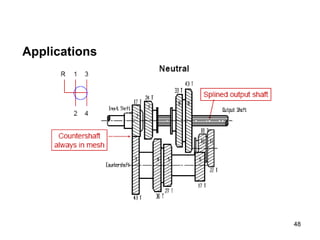
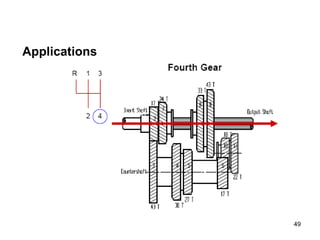
The document discusses different types of gear trains including simple, compound, reverted, and epicyclic gear trains. It provides examples and diagrams of each type of gear train, explaining how they work and their applications. In particular, it describes the basic theory of how an epicyclic gear train functions, with a planet gear revolving around a central sun gear in a similar way that planets orbit the sun.