Download as PDF, PPTX
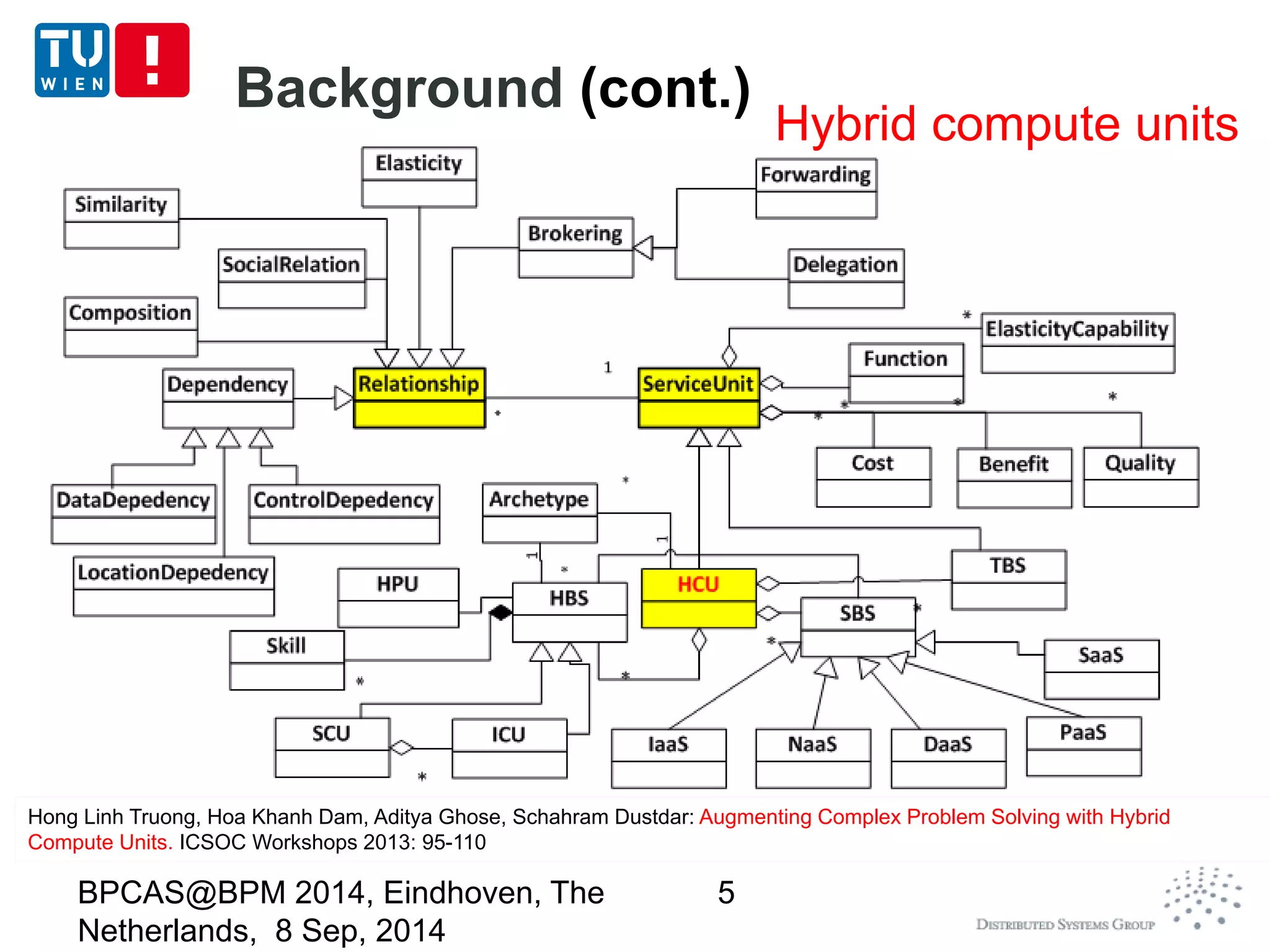
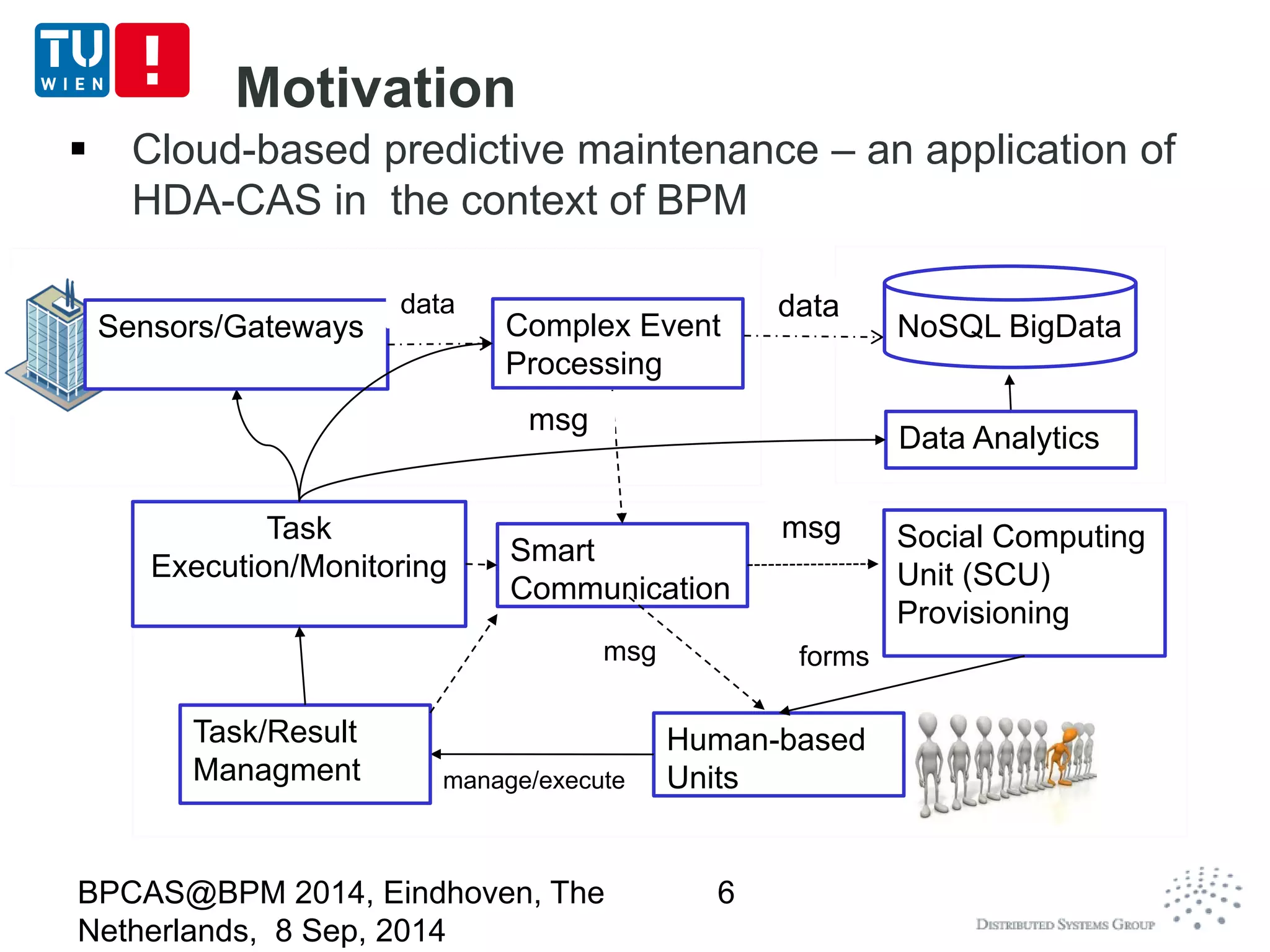
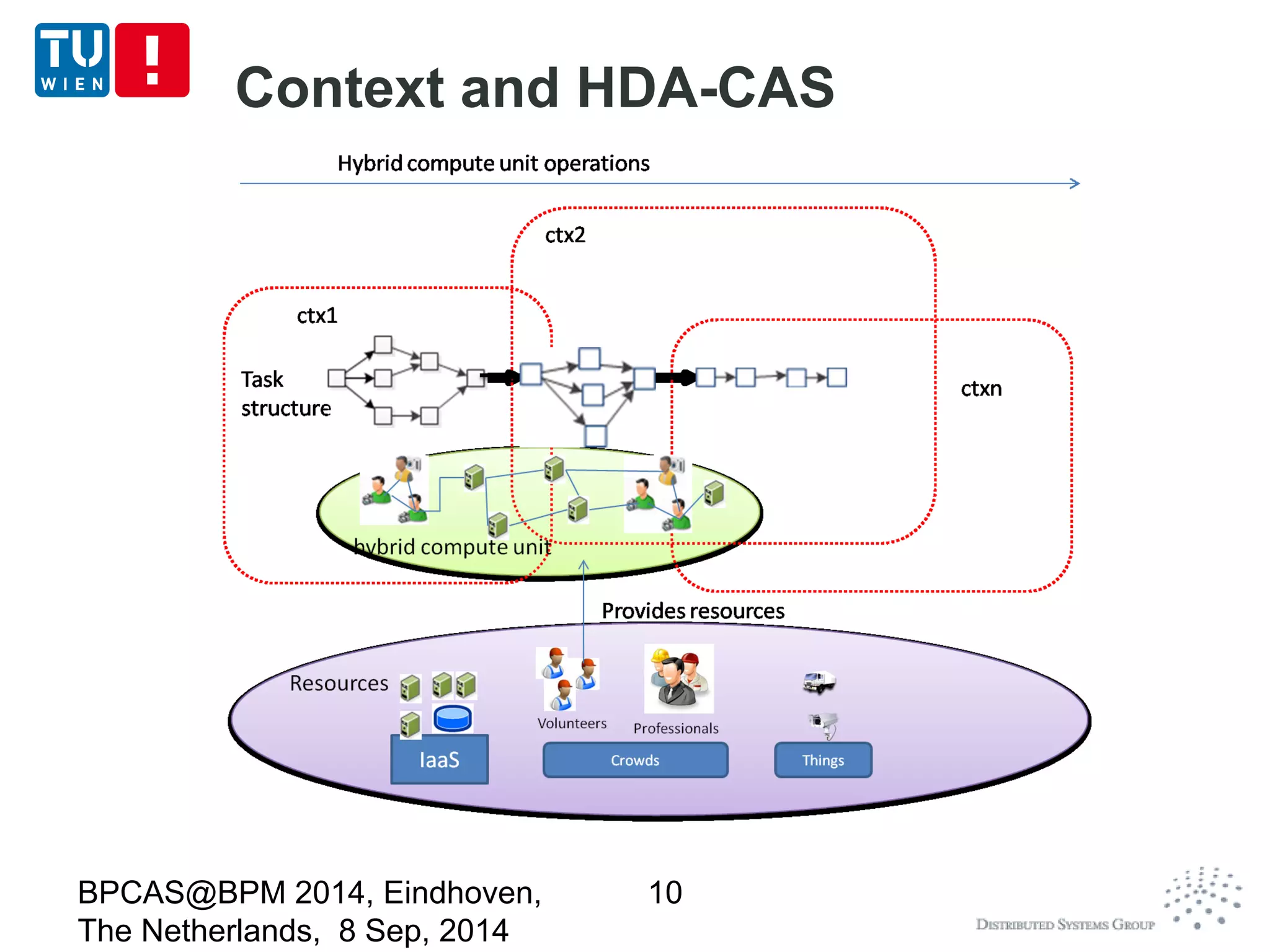
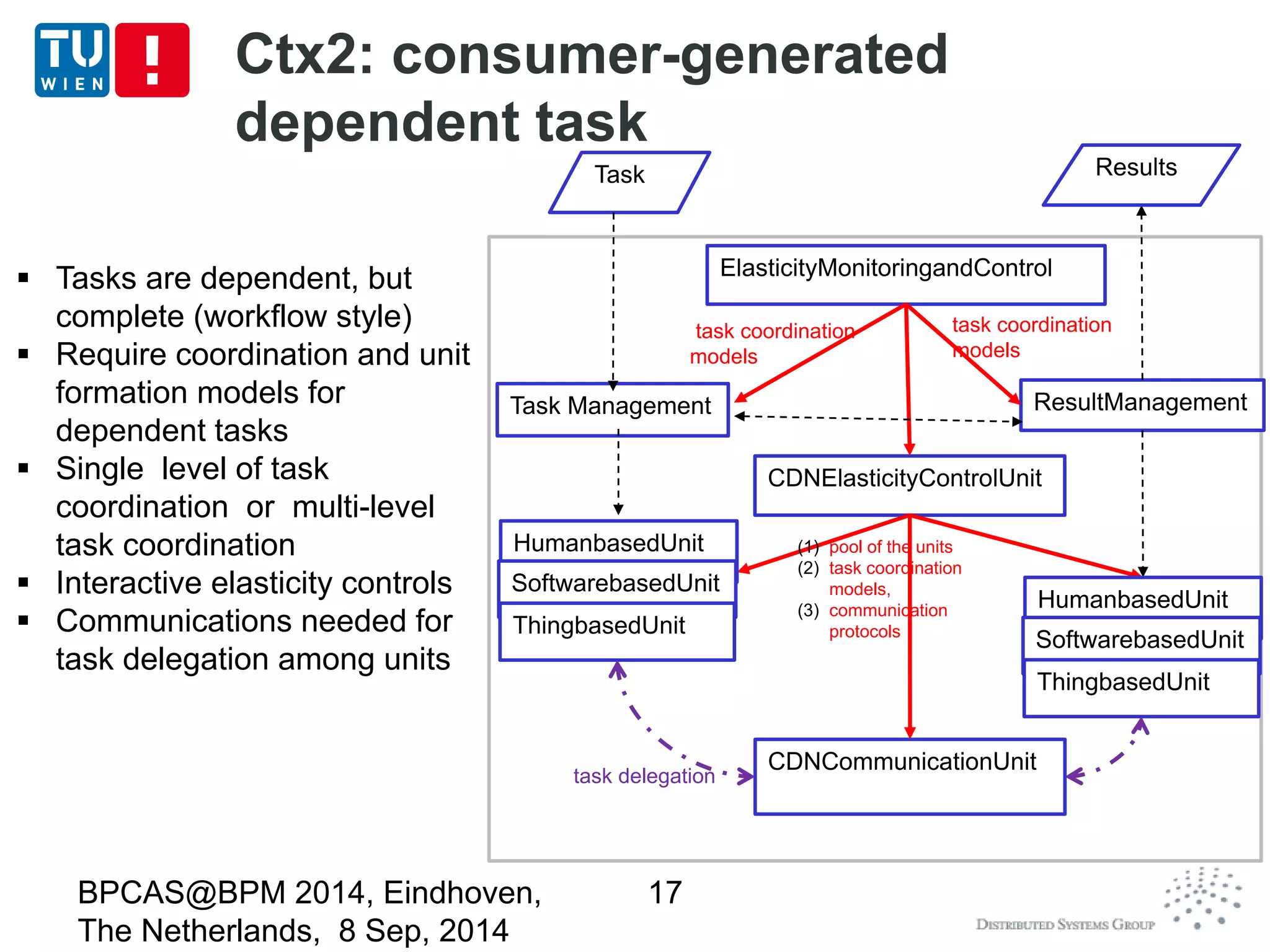
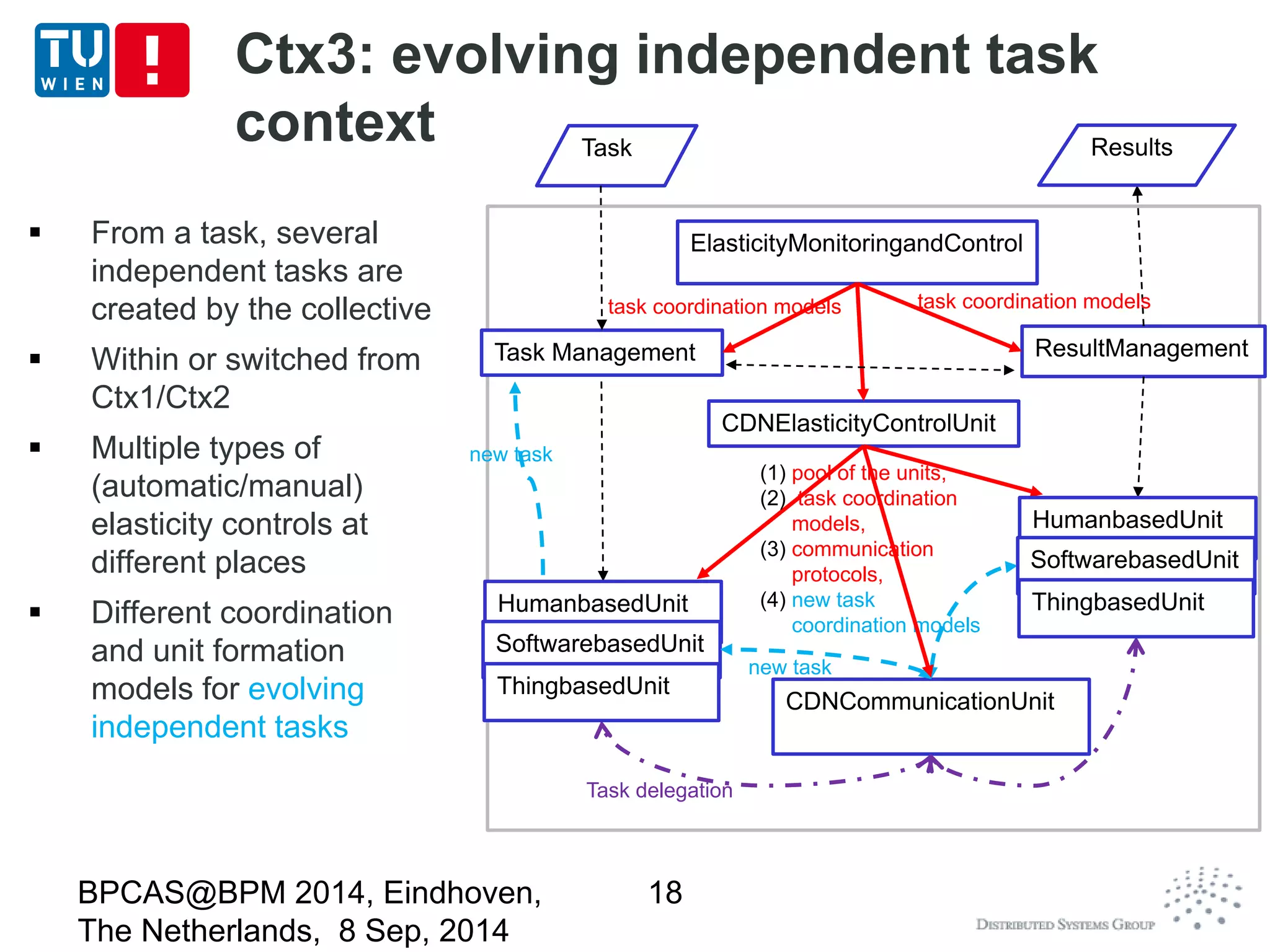
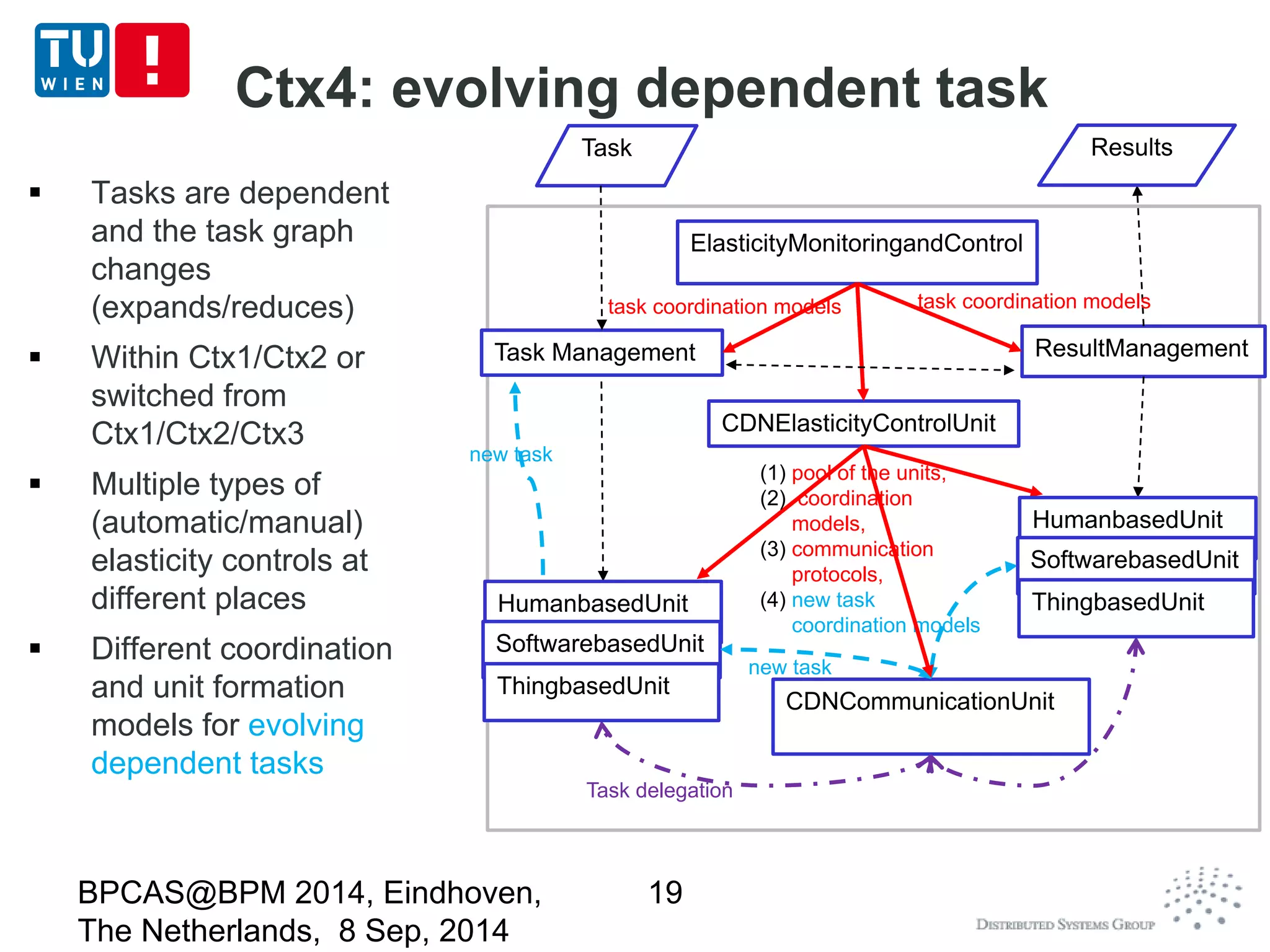

The document discusses context-aware programming for hybrid and diversity-aware collective adaptive systems (HDA-CAS) developed by Hong-Linh Truong and Schahram Dustdar. It outlines the motivation and background for HDA-CAS, emphasizing the importance of hybridity and elasticity in addressing complex problems through hybrid compute units. The authors propose strategies and tools for programming and managing HDA-CAS, highlighting the need for context understanding and the development of suitable programming constructs.