Download to read offline
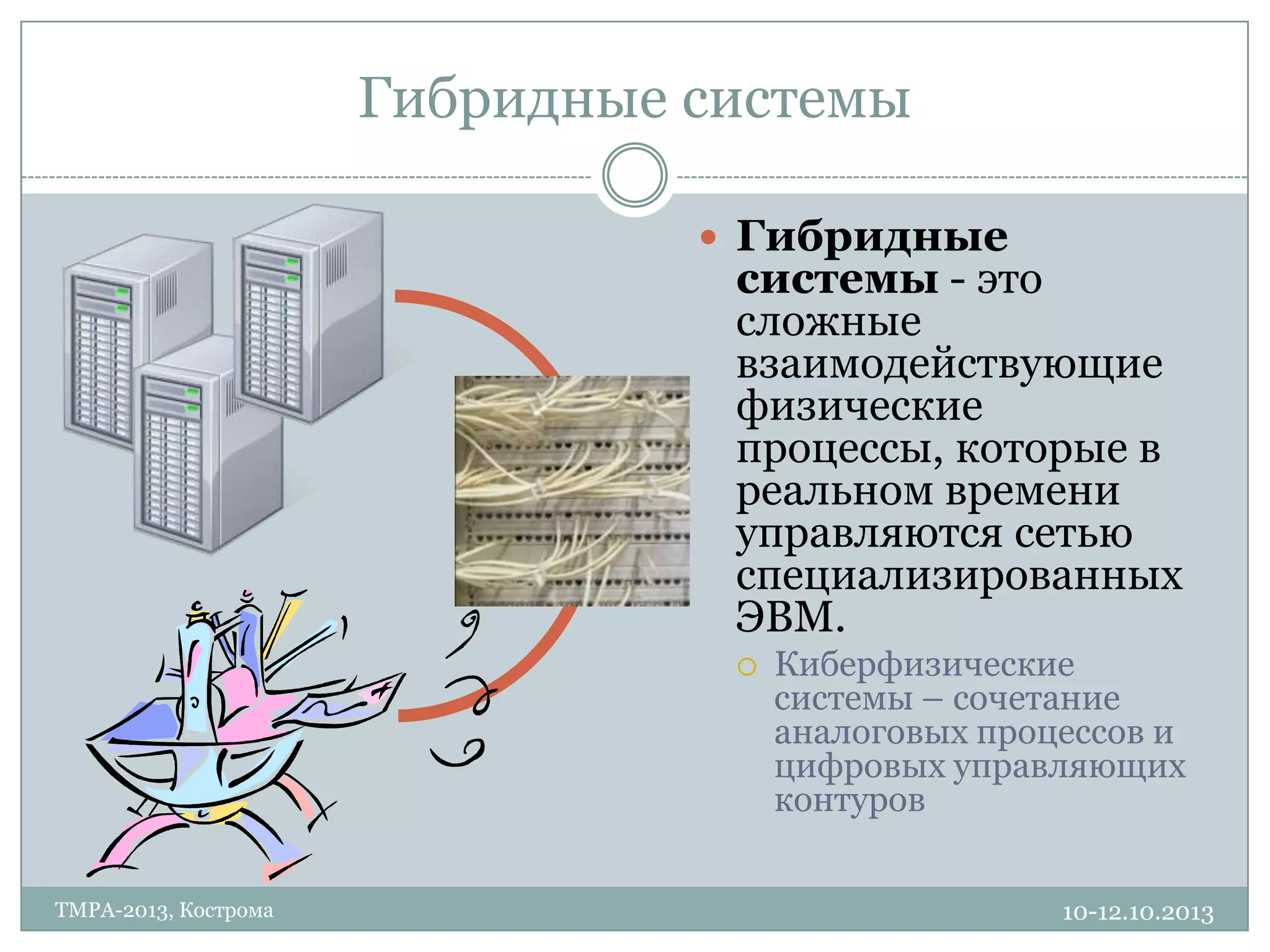
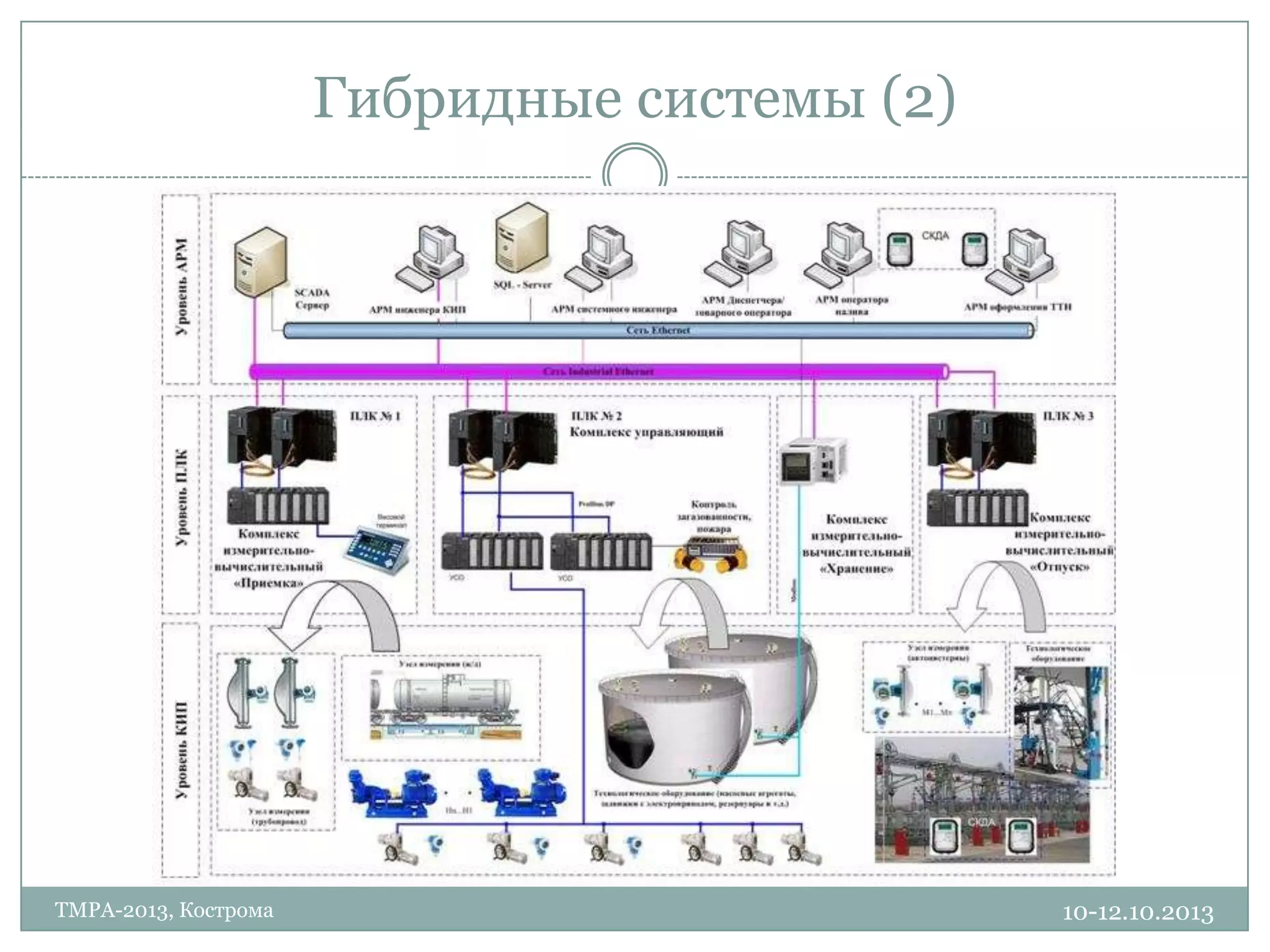





Документ описывает динамическую верификацию гибридных систем, которые являются комплексными киберфизическими системами, управляющими физическими процессами в реальном времени. Основное внимание уделяется верификации на ранних этапах разработки, используя различные методы тестирования и моделирования для повышения надежности и функциональности систем, таких как автопилоты в авиации. Также обсуждаются риски, связанные с внедрением гибридных систем, включая техногенные катастрофы и ошибки проектирования.