自己紹介
• 木澤朋和(きざわともかず)
• 某メーカー系でエンジニアをやっています
•Microsoft MVP for Windows and Devices for IT
(2022/7~2023/6)
• ブログの執筆
• ポッドキャスト番組の配信、動画(YouTube)の
配信
Copyright (c) 2023 Tomokazu Kizawa All rights reserved. 3
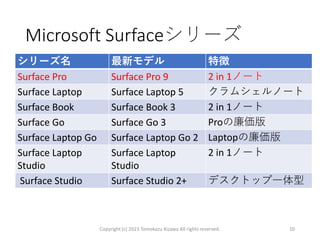
Microsoft Surfaceシリーズ
シリーズ名 最新モデル特徴
Surface Pro Surface Pro 9 2 in 1ノート
Surface Laptop Surface Laptop 5 クラムシェルノート
Surface Book Surface Book 3 2 in 1ノート
Surface Go Surface Go 3 Proの廉価版
Surface Laptop Go Surface Laptop Go 2 Laptopの廉価版
Surface Laptop
Studio
Surface Laptop
Studio
2 in 1ノート
Surface Studio Surface Studio 2+ デスクトップ一体型
Copyright (c) 2023 Tomokazu Kizawa All rights reserved. 10
11.
Surface Pro 9の機能
Copyright (c) 2023 Tomokazu Kizawa All rights reserved. 11
12.
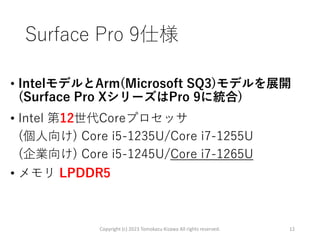
Surface Pro 9仕様
•IntelモデルとArm(Microsoft SQ3)モデルを展開
(Surface Pro XシリーズはPro 9に統合)
• Intel 第12世代Coreプロセッサ
(個人向け) Core i5-1235U/Core i7-1255U
(企業向け) Core i5-1245U/Core i7-1265U
• メモリ LPDDR5
Copyright (c) 2023 Tomokazu Kizawa All rights reserved. 12
13.
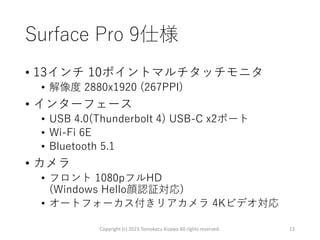
Surface Pro 9仕様
•13インチ 10ポイントマルチタッチモニタ
• 解像度 2880x1920 (267PPI)
• インターフェース
• USB 4.0(Thunderbolt 4) USB-C x2ポート
• Wi-Fi 6E
• Bluetooth 5.1
• カメラ
• フロント 1080pフルHD
(Windows Hello顔認証対応)
• オートフォーカス付きリアカメラ 4Kビデオ対応
Copyright (c) 2023 Tomokazu Kizawa All rights reserved. 13
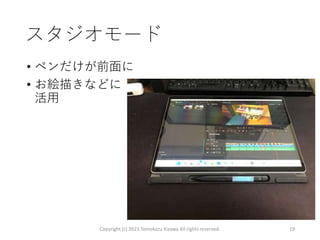
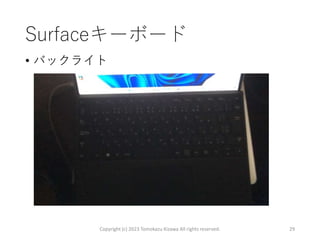
外観
Copyright (c) 2023Tomokazu Kizawa All rights reserved. 15
マイクロソフト Surface Pro 9の機能より
https://support.microsoft.com/ja-jp/surface/surface-pro-9-%E3%81%AE%E6%A9%9F%E8%83%BD-f3f523e6-
4f0e-487d-a95c-6115ab55477d
音声認識(文字起こし)
• Win +Hで音声認識機能が起動
• デモ
Copyright (c) 2023 Tomokazu Kizawa All rights reserved. 45
46.
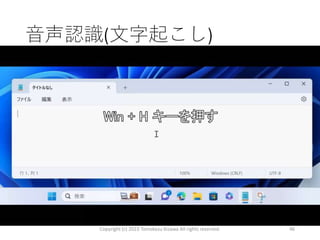
音声認識(文字起こし)
• Win +Hで音声認識
• マイクの特徴を書く
Copyright (c) 2023 Tomokazu Kizawa All rights reserved. 46
47.
音声認識(文字起こし)
• Dual far-fieldスタジオ マイク
離れた場所からもよりクリアな音声を聞き取る
(Surface Go 2から採用)
実測で3m離れた場所からの音声を認識
• Surface Pro 9 with 5Gであれば
Windows Studio Effectsで人の声のみを
聞き取る
Copyright (c) 2023 Tomokazu Kizawa All rights reserved. 47








![JPC2017 [C3] 働き方改革の第一歩はデバイスから。モダン デバイスの代表格 Surface が求められる理由](https://cdn.slidesharecdn.com/ss_thumbnails/jpc2017c3surface-170911125233-thumbnail.jpg?width=640&height=640&fit=bounds)










![JPC2018[C2]Microsoft 365 と相性抜群! 働き方改革時代にこそ生きる Surface ファミリー詳解](https://cdn.slidesharecdn.com/ss_thumbnails/c2-180906030219-thumbnail.jpg?width=640&height=640&fit=bounds)




























