Документ посвящен автоматизированным информационно-управляющим системам и охватывает темы имитационного моделирования технологических процессов, основы вейвлет-преобразования и вторичной обработки данных. В нем представлены основные принципы и методы моделирования, а также описаны различные подходы к построению моделей и обработки сигналов. Также рассматриваются контрольные вопросы для закрепления материала и анализа технологических процессов.










































































![Автоматизированные информационно-управляющие системы
.
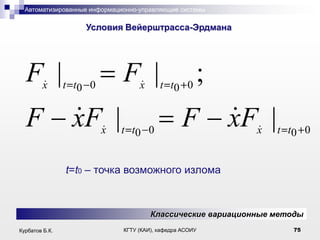
Функциональное уравнение Беллмана
0
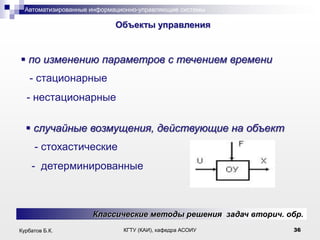
min[ F ( x, y)
u U
f
f ( x, u)]
x
Динамическое программирование
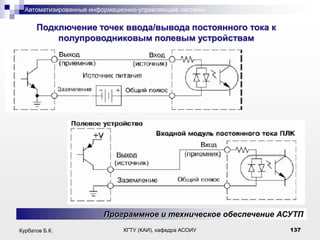
Курбатов Б.К.
КГТУ (КАИ), кафедра АСОИУ
84](https://image.slidesharecdn.com/random-140205022826-phpapp01/85/slide-84-320.jpg)














![Автоматизированные информационно-управляющие системы
.
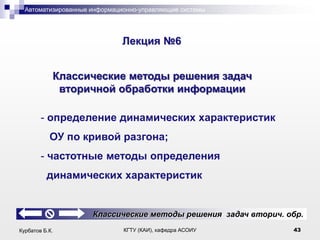
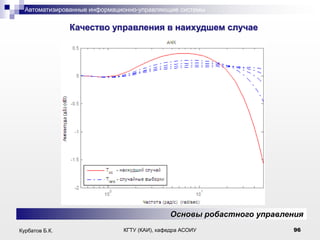
Нечѐткие множества
Пусть Е – универсальное множество;
x – элемент Е;
R – некоторое свойство
A = { x | μA( x ) }
1, если x удовлетворяет R
Если А чёткое:
μA(x) =
Если А нечёткое:
μA(x) € M ( например, М = [0;1] )
0, если x не удовлетворяет R
Методы интеллектуального управления
Курбатов Б.К.
КГТУ (КАИ), кафедра АСОИУ
100](https://image.slidesharecdn.com/random-140205022826-phpapp01/85/slide-100-320.jpg)
![Автоматизированные информационно-управляющие системы
.
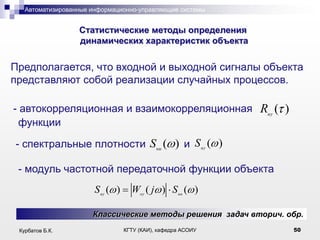
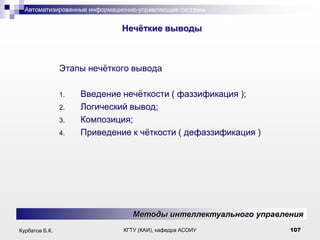
Пример нечѐткого множества
Пусть Е = { x1, x2, x3, x4, x5 }
M = [0;1]
A – нечѐткое множество, для которого
μA(x1) = 0,3;
μA(x3) = 1;
μA(x5) = 0,9.
μA(x2) = 0;
μA(x4) = 0,5;
A = { 0,3/x1; 0/x2; 1/x3; 0,5/x4; 0,9/x5 }
или
A = { 0,3/x1 + 0/x2 + 1/x3 + 0,5/x4 + 0,9/x5 }
Методы интеллектуального управления
Курбатов Б.К.
КГТУ (КАИ), кафедра АСОИУ
101](https://image.slidesharecdn.com/random-140205022826-phpapp01/85/slide-101-320.jpg)







































































![[DD] 3. Combinational circuits](https://cdn.slidesharecdn.com/ss_thumbnails/3-210616104712-thumbnail.jpg?width=640&height=640&fit=bounds)



















