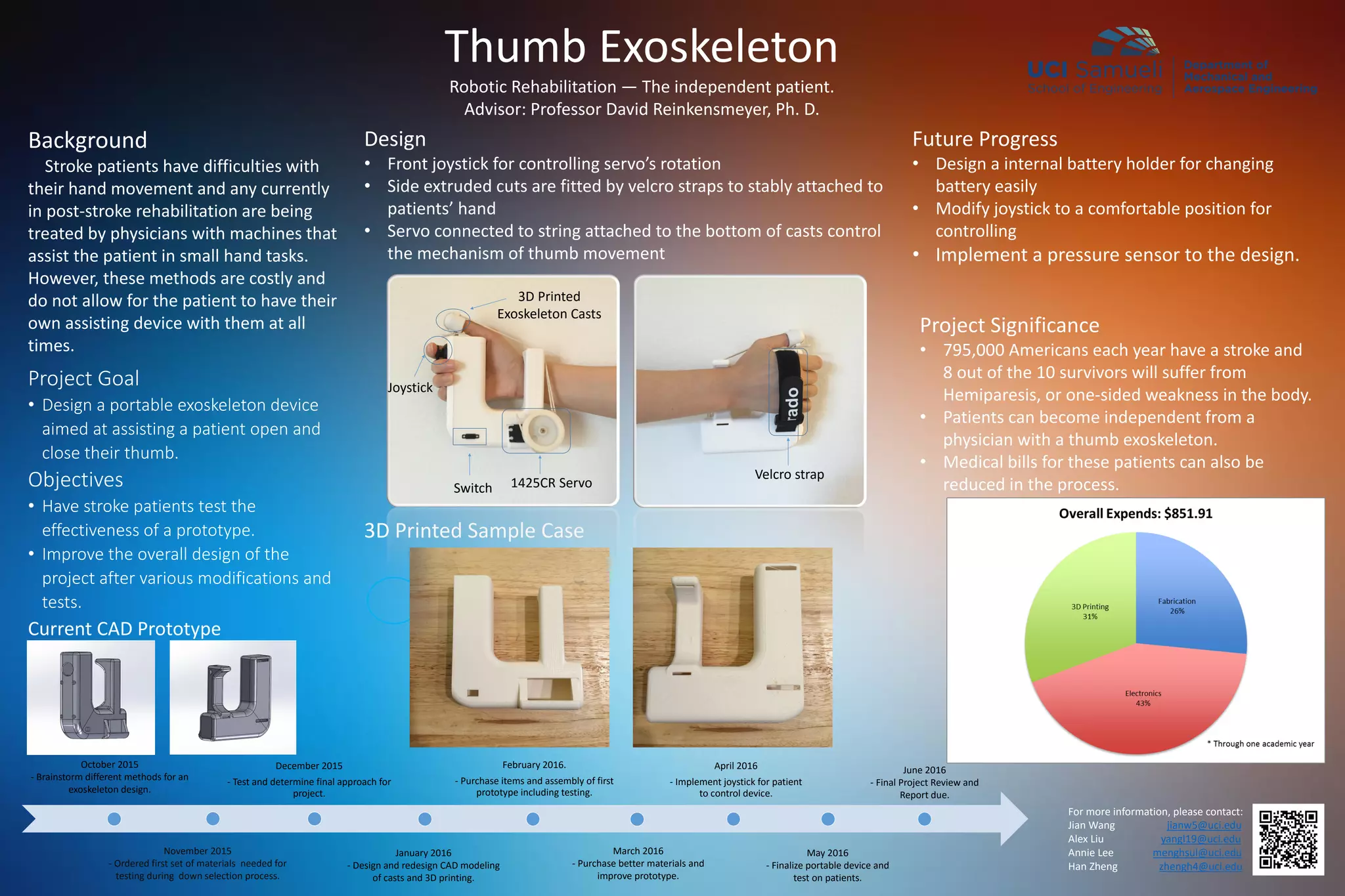
This document describes a project to design a portable thumb exoskeleton device to assist stroke patients in opening and closing their thumb. The goal is to allow patients to regain independence without needing constant physician assistance. A team will design and test prototypes, getting feedback from stroke patients. Improvements like an internal battery holder and pressure sensor will be implemented. If successful, the low-cost portable device could help patients and reduce medical costs for stroke rehabilitation.