The document outlines NASA's organizational vision, mission, goals, and strategies for improving safety and diversity in space exploration. It discusses the importance of communication, employee involvement, and adapting to change through a structured approach based on Kotter's 8-step change model. The plan emphasizes the necessity of partnerships, safety updates, and encouraging diverse participation in STEM careers to achieve NASA's objectives.
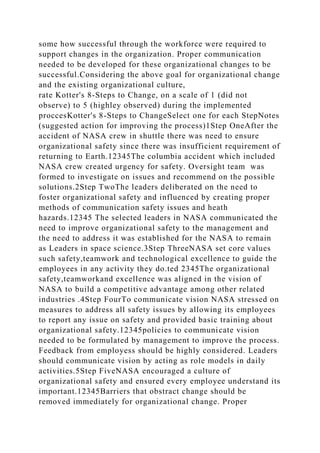
![Sheet1Organizational Change ChartSelect one for each
categoryNotes (suggested action for improvement)Vision:To
Separate the Real from the Imagined Through Flight
[1 - no knowledge, 5 - know it well].)
12345NASA as explorers and innovators in the world needed to
expand space frontiers and improve quality of life on Earth by
through investment in space for human use to benefit the whole
world.Mission: Advancing Technology and Science Through
Flight.
[1 - no knowledge, 5 - know it well].)
)
12345 Development of space for commercial use by humans ,
participation and partnering with other countries to advance
knowledge of science in understanding the Earth, moon and the
general Universe .Purpose: The purpose of NASA organisation
is to explore space and Earth to improve the quality of life .[1 -
no knowledge, 5 - know it well].)
12345The purpose of NASA is well known. NASA should invest
more in space and constantly provide updates on any emerging
issues.Values: The core values of NASA organization includes
Safety,integrity,teamwork and Excellence. Rate the employee
knowledge of the organizational Values [1 - no knowledge, 5 -
know it well].)
12345The core values of NASA are somehow known though
safety needed to improved in execution of NASA missions
.Diversity:NASA organization partnered with other industries to
execute its objectives, also encouraged diverse people to persue
careers in STEM so that they help them to achieve their goals. [
1- no diverse at all, 5 - highly diverse].)12345NASA
organization is very diverse. More industries should be](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-1-320.jpg)
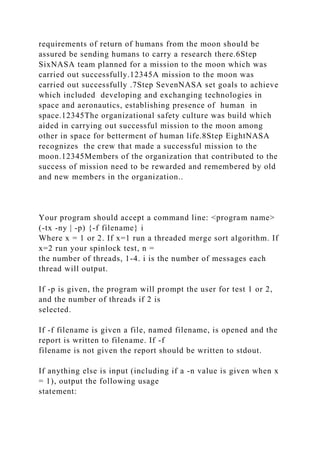
![encouraged to partner with NASA to support in finance and
other knowledge .Inclusion: (Rate the overall involvement of
the diverse groups in all the decision making and process for
change [ 1- no involvement at all, 5 - highly involved])
12345The diverse groups were more involved in decision
making and process of change. Inclusion of groups needed to be
considered in every stage of decision making and process of
change to build a competitive advantage.Goal: NASA set the
following goals :-NASA will be leaders in space exploration
and science. Develop and exchange technologies in space and
aeronautics. To establish presence of human in space.
12345some of the strategies were successful though some
actions about yhe return of humans from the moon and mars was
a challenge and needed to be improved for safety
measures.Strategy: strategies used by NASA included Mission
to understanding of Earth and human impact on earth's
environment,Aeronautics and Space Technology,
Human Exploration and Development of Space and science of
space
Space Science; [ 1 - very poor strategies, 5 very successful
strategies] )
12345Organizational safety needed to be improved for these
strategies to executed well by NASA as the leaders in aeronatics
and space science.Communication: NASA organization is a
scientific and technical agency which is committed openness in
communication in media and general public that recognizes
free ideas exchange and information .
(b) , NASA will create awareness about its activities and the
findings.
(c) NASA will ensure information is provided to users on time.
(d) NASA employees could channel their feedback to the
management even to press for readdress.
( [ 1 - very poor communication, 5 very successful
communication] )
12345communication means about organizational change were](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-2-320.jpg)






![#include "mopt.h"
#include <stdlib.h>
#include "getopt.h"
//
// Fairleigh Dickinson University
// CSCIxxxx <semester><year>
// Programming Assignment x
//
// Description:
//
//
enum {TABLESIZE = 257};
typedef struct
{
char m[TABLESIZE];](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-11-320.jpg)
![const char * p[TABLESIZE];
int tLen;
char oS[2*TABLESIZE];
int oLen;
char * pC;
} mType;
void * initialize()
{
const int sL = sizeof(mType);
void * mP = calloc(sL,1);
return mP;
}
static void addOptP(const char c, const char * const s, void * p)
{
if (optExist(c,p) != 1)
{](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-12-320.jpg)
![mType * const mP = (mType * const)p;
int i = mP->tLen;
mP->m[i] = c;
mP->p[i++] = s;
mP->tLen = i;
}
}
const int setO(const char c, const int e, void * p)
{
mType * const mP = (mType * const)p;
int i = mP->oLen;
mP->oS[i++] = c;
if (e) mP->oS[i++] = ':';
mP->oLen = i;
return 1;
}](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-13-320.jpg)
![const char * const getArg(const char c, void * p)
{
const int i = optExist(c,p);
if (i>=0)
{
mType * const mP =(mType * const)p;
const char * pA = mP->p[i];
return pA;
}
return 0;
}
const sType parse
(](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-14-320.jpg)
![// printing
// messages.
//
opterr = 0;
c = getopt(argc,argv,optstring);
do
{
if (c=='?') return MOPT_ERROR;
if (optExist(c,p) != -1)
return MOPT_ERROR;
addOptP (c,optarg,mP);
c = getopt(argc, argv, optstring);
} while (c+1);
mP->pC = (char *)argv[optind];
return MOPT_PARSEOK;
}](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-16-320.jpg)
![const char * const aVI(void * p)
{
mType * const mP = (mType * const)p;
const char * const t = mP->pC;
return t;
}
const int optExist(const char c, void * p)
{
if (p)
{
const mType * const mP = (mType*)p;
const char * r =
(const char *)mP->m;
int i = 0;
while(r[i])](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-17-320.jpg)
![if (c==r[i]) return i;
else ++i;
}
return -1;
}
const sType moptFree(void * p)
{
if (p) free(p);
p = 0;
return MOPT_CLEAR;
}
/*
** Program 4 -- W Phillips 04705804
** CSE 7343 Summer 2006
**
** This program was compiled and run on neo.engr.smu.edu](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-18-320.jpg)

![** the arrays the max size which is what we'd
** have to do in the max case anyway. For
** multiple runs I figured this would work out
** better instead of doing all the dynamic
** allocations and frees. It could make for
** a fairer test.
*/
int smallArray1[MAXARRAYSIZE];
int smallArray2[MAXARRAYSIZE];
int smallArray3[MAXARRAYSIZE];
int smallArray4[MAXARRAYSIZE];
int largeArray1[MAX2ARRAYSIZE];
int largeArray2[MAX2ARRAYSIZE];
int largeArray3[MAX2ARRAYSIZE];
/*
** This parameter gets set to 1 if the user
** enters any parameter when this program is](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-21-320.jpg)
![** run. If that is the case, quicksort is
** used instead of shell sort.
*/
int useQsort = 0;
const double mS_PER_SEC = 1000000.0;
/*
** This is the quicksort algorithm. Since all intermediate
** variables are defined locally (on the stack) it is thread-
** safe.
**
*/
int partition(int * const a, const int l, const int r, const char * s)
{
const int pivot = a[l];
int i = l;
int j = r+1;](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-22-320.jpg)
![int t;
while(1)
{
wBUF("A Q message");
wBUF(s);
wBUF("n");
do ++i; while((a[i]<=pivot) && (i<=r));
do --j; while(a[j]>pivot );
if(i>=j) break;
t = a[i];
a[i] = a[j];
a[j] = t;
}
t = a[l];
a[l] = a[j];
a[j] = t;
return j;](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-23-320.jpg)

![*/
void shellSortPhase(int * const a, const int length, const int
gap)
{
int i;
for (i=gap; i<length; ++i)
{
wBUF("An S messagen");
const int value = a[i];
int j;
for (j = i - gap; j >= 0 && a[j] > value; j -= gap)
a[j + gap] = a[j];
a[j + gap] = value;
}
}
void sSortArray(int * const a, const size_t length, const char *
s)
{](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-25-320.jpg)
![/*
* gaps[] should approximate a geometric progression.
* The following sequence is the best known in terms of
* the average number of key comparisons made [2]
*/
static const int gaps[] = { 1, 4, 10, 23, 57, 132, 301, 701 };
int sizeIndex;
for
(
sizeIndex = sizeof(gaps)/sizeof(gaps[0]) - 1;
sizeIndex >= 0;
--sizeIndex
)
shellSortPhase(a,length,gaps[sizeIndex]);
}
/*
** END SHELL SORT ALGORITHM](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-26-320.jpg)
![*/
/*
** This structure is passed between the thread
** invocation and the sort algorithm.
*/
typedef struct
{
int * const a;
const int s;
const char tc[2];
} sortParmType;
/*
** Single exit point.
*/
void cleanExit()](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-27-320.jpg)

![else sSortArray (S->a,S->s , S->tc);
cleanExit();
return (void *)0; /* never executes -- eliminates */
/* compiler warnings */
}
/*
** This function gets the array size from the
** user.
*/
const long getArraySize(const char * const p)
{
char line[MAXLINE];
const int j = fputs(p, stdout);
const char * const c = fgets(line, MAXLINE, stdin);
const long s = (long) atof(line);
if ((s<=0) || (s>MAXARRAYSIZE))
{](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-29-320.jpg)
![if (useQsort) printf("Quicksort Usedn");
else printf("Shellsort Usedn");
cleanExit();
}
return s;
}
/*
** This function copies one array to another.
*/
void copyArray
(int * const a, const int * const b, const int arrSize)
{
int i;
for (i=0; i<arrSize; ++i) a[i] = b[i];
}
/*](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-30-320.jpg)

![{
if (i1 == aInSize)
aTarg[iTarg++] = a2[i2++];
else if (i2 == aInSize)
aTarg[iTarg++] = a1[i1++];
else if (a1[i1] < a2[i2])
aTarg[iTarg++] = a1[i1++];
else
aTarg[iTarg++] = a2[i2++];
} while (iTarg<aTargSize);
}
/*
** Error in spawning thread? Exit.
*/
void sThreadError(const int t)
{
if(t) printf("Error spawning Thread 1n");](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-32-320.jpg)




![const int * const a2in,
const int arrSize
)
{
int i;
const int u = arrSize-1;
for (i=0; i<arrSize; ++i)
{
if (a1in[i] != a2in[i]) return 0;
if ((i<u) && (a1in[i] > a1in[i+1])) return 0;
}
return 1;
}
/*
** This function outputs an array to stdout as long
** as DUMPINHIBIT is not equal to zero.
*/](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-38-320.jpg)
![void dumpArray
(
const char * const t,
const int * const a,
const int arrSize
)
{
if (DUMPINHIBIT) return;
int i;
printf("n"); printf(t); printf("n");
for (i=0; i<arrSize; printf(" %dn", a[i++]));
}
/*
** This function fills an array with values
** ranging from 0 to RAND_MAX.
*/](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-39-320.jpg)
![void fillArray(int * const a, const int arrSize)
{
int i;
for (i=0; i<arrSize; ++i) a[i] = rand();
}
int main(const int argc, char * const argv[])
{
/*
** Build the prompt so it will adjust if MAXARRAYSIZE
** is changed.
*/
char prompt[PROMPTSIZE];
sprintf
(
prompt,
"nEnter array size: 1 -- %d or anything else to quit >>
",](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-40-320.jpg)

![clock_t t1,t2;
/*
** Populate the test arrays. Steps 1,2, and 3
*/
fillArray(smallArray1,as);
fillArray(smallArray2,as);
copyArray(smallArray3,smallArray1,as);
copyArray(smallArray4,smallArray2,as);
copyArray(largeArray3,smallArray1,as);
copyArray(&largeArray3[as],smallArray2,as);
/*
** Run the first test case (2 sorts and a merge) Step 4
*/
initBUF();
t1 = clock();](https://image.slidesharecdn.com/sheet1organizationalchangechartselectoneforeachcategorynotes-221116050340-fe31a784/85/Sheet1Organizational-Change-ChartSelect-one-for-each-categoryNotes-docx-42-320.jpg)



















![03_August_2016_Richard_Bailey_Resume[1]](https://cdn.slidesharecdn.com/ss_thumbnails/e5274ef5-9684-4ad9-ab7b-525cb01b04c4-170302134408-thumbnail.jpg?width=640&height=640&fit=bounds)






















































