Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
KY
Uploaded by
Kinuko Yasuda
PDF, PPTX
20,826 views
Service worker が拓く mobile web の新しいかたち
Service worker が拓く mobile web の新しいかたち
Technology
◦
Read more
85
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 54
2
/ 54
3
/ 54
4
/ 54
5
/ 54
6
/ 54
7
/ 54
8
/ 54
Most read
9
/ 54
10
/ 54
11
/ 54
12
/ 54
13
/ 54
14
/ 54
15
/ 54
Most read
16
/ 54
17
/ 54
18
/ 54
19
/ 54
20
/ 54
21
/ 54
22
/ 54
23
/ 54
24
/ 54
25
/ 54
26
/ 54
27
/ 54
28
/ 54
29
/ 54
30
/ 54
31
/ 54
32
/ 54
33
/ 54
34
/ 54
35
/ 54
36
/ 54
Most read
37
/ 54
38
/ 54
39
/ 54
40
/ 54
41
/ 54
42
/ 54
43
/ 54
44
/ 54
45
/ 54
46
/ 54
47
/ 54
48
/ 54
49
/ 54
50
/ 54
51
/ 54
52
/ 54
53
/ 54
54
/ 54
More Related Content
PPTX
Spring Boot ユーザの方のための Quarkus 入門
by
tsukasamannen
PDF
Spring Boot + Netflix Eureka
by
心 谷本
PDF
MySQL負荷分散の方法
by
佐久本正太
PPTX
Docker & Kubernetes基礎
by
Daisuke Hiraoka
PDF
20221117_クラウドネイティブ向けYugabyteDB活用シナリオ
by
Masaki Yamakawa
PDF
今からでも遅くないDBマイグレーション - Flyway と SchemaSpy の紹介 -
by
onozaty
PPTX
Kubernetesでの性能解析 ~なんとなく遅いからの脱却~(Kubernetes Meetup Tokyo #33 発表資料)
by
NTT DATA Technology & Innovation
PDF
DockerとPodmanの比較
by
Akihiro Suda
Spring Boot ユーザの方のための Quarkus 入門
by
tsukasamannen
Spring Boot + Netflix Eureka
by
心 谷本
MySQL負荷分散の方法
by
佐久本正太
Docker & Kubernetes基礎
by
Daisuke Hiraoka
20221117_クラウドネイティブ向けYugabyteDB活用シナリオ
by
Masaki Yamakawa
今からでも遅くないDBマイグレーション - Flyway と SchemaSpy の紹介 -
by
onozaty
Kubernetesでの性能解析 ~なんとなく遅いからの脱却~(Kubernetes Meetup Tokyo #33 発表資料)
by
NTT DATA Technology & Innovation
DockerとPodmanの比較
by
Akihiro Suda
What's hot
PDF
Serf / Consul 入門 ~仕事を楽しくしよう~
by
Masahito Zembutsu
PDF
AWSのログ管理ベストプラクティス
by
Akihiro Kuwano
PDF
nginx入門
by
Takashi Takizawa
PDF
HTTPを理解する
by
IIJ
PDF
負荷試験入門公開資料 201611
by
樽八 仲川
PDF
Riverpodでテストを書こう
by
Shinnosuke Tokuda
PDF
これで怖くない!?大規模環境で体験するDB負荷対策~垂直から水平の彼方へ~
by
hideakikabuto
PDF
Ingress on Azure Kubernetes Service
by
Toru Makabe
PPTX
Docker Tokyo
by
cyberblack28 Ichikawa
PDF
トランザクション処理可能な分散DB 「YugabyteDB」入門(Open Source Conference 2022 Online/Fukuoka 発...
by
NTT DATA Technology & Innovation
PDF
YugabyteDBを使ってみよう(NewSQL/分散SQLデータベースよろず勉強会 #1 発表資料)
by
NTT DATA Technology & Innovation
PPTX
GraalVM を普通の Java VM として使う ~クラウドベンチマークなどでの比較~
by
Shinji Takao
PDF
eBPFを用いたトレーシングについて
by
さくらインターネット株式会社
PDF
Dockerからcontainerdへの移行
by
Kohei Tokunaga
PDF
DBスキーマもバージョン管理したい!
by
kwatch
PPTX
Amazon EKS への道 ~ EKS 再入門 ~
by
Hideaki Aoyagi
PDF
Grafana LokiではじめるKubernetesロギングハンズオン(NTT Tech Conference #4 ハンズオン資料)
by
NTT DATA Technology & Innovation
PDF
Dockerを支える技術
by
Etsuji Nakai
PDF
svn 능력자를 위한 git 개념 가이드
by
Insub Lee
PDF
Kubernetes Introduction
by
Peng Xiao
Serf / Consul 入門 ~仕事を楽しくしよう~
by
Masahito Zembutsu
AWSのログ管理ベストプラクティス
by
Akihiro Kuwano
nginx入門
by
Takashi Takizawa
HTTPを理解する
by
IIJ
負荷試験入門公開資料 201611
by
樽八 仲川
Riverpodでテストを書こう
by
Shinnosuke Tokuda
これで怖くない!?大規模環境で体験するDB負荷対策~垂直から水平の彼方へ~
by
hideakikabuto
Ingress on Azure Kubernetes Service
by
Toru Makabe
Docker Tokyo
by
cyberblack28 Ichikawa
トランザクション処理可能な分散DB 「YugabyteDB」入門(Open Source Conference 2022 Online/Fukuoka 発...
by
NTT DATA Technology & Innovation
YugabyteDBを使ってみよう(NewSQL/分散SQLデータベースよろず勉強会 #1 発表資料)
by
NTT DATA Technology & Innovation
GraalVM を普通の Java VM として使う ~クラウドベンチマークなどでの比較~
by
Shinji Takao
eBPFを用いたトレーシングについて
by
さくらインターネット株式会社
Dockerからcontainerdへの移行
by
Kohei Tokunaga
DBスキーマもバージョン管理したい!
by
kwatch
Amazon EKS への道 ~ EKS 再入門 ~
by
Hideaki Aoyagi
Grafana LokiではじめるKubernetesロギングハンズオン(NTT Tech Conference #4 ハンズオン資料)
by
NTT DATA Technology & Innovation
Dockerを支える技術
by
Etsuji Nakai
svn 능력자를 위한 git 개념 가이드
by
Insub Lee
Kubernetes Introduction
by
Peng Xiao
Similar to Service worker が拓く mobile web の新しいかたち
PDF
Service workerとwebプッシュ通知
by
zaru sakuraba
PDF
Service Workerとの戦い ~ 実装編 ~ #scripty03
by
Yahoo!デベロッパーネットワーク
PDF
フレームワークも使っていないWebアプリをLaravel+PWAでモバイルアプリっぽくしてみちゃう
by
株式会社オプト 仙台ラボラトリ
PPTX
PWA 総まとめ @ABC 2018 Spring
by
Ryu Shindo
PDF
Let's try to use Background sync
by
Hirata Tomoko
PPTX
Cache 自由自在
by
Ryu Shindo
PDF
Service Workers Push API Hands-on
by
Takenori Nakagawa
PPTX
W3C Push の話
by
Tamaki Shintaro
PDF
進化する Web ~ Progressive Web Apps の実装と応用 ~
by
Microsoft Azure Japan
PDF
Service Workers
by
Takenori Nakagawa
PPTX
Challenge PWA!! WordCamp Tokyo 2018
by
Ryu Shindo
PDF
ServiceWorkerでつくるWebの未来
by
Yoshiki Kobayashi
PDF
Web Worker +α - HTML5/JavaScript and Service Worker API
by
Ken William
PPTX
WordPressサイトをスマホアプリにしちゃおう!
by
Ryu Shindo
PDF
Service Worker を知る
by
kasikasikasi
PDF
第49回HTML5勉強会 Google I/O 2014サマリー
by
Takuya Oikawa
PPTX
wordcamp haneda 20190420 Apps Based on WordPress
by
Ryu Shindo
PDF
Offline Drupal with progressive web app
by
Théodore Biadala
PDF
モダンWeb開発ワークショップ
by
Staffnet_Inc
PPTX
Service Workerとは何者か
by
Ryu Shindo
Service workerとwebプッシュ通知
by
zaru sakuraba
Service Workerとの戦い ~ 実装編 ~ #scripty03
by
Yahoo!デベロッパーネットワーク
フレームワークも使っていないWebアプリをLaravel+PWAでモバイルアプリっぽくしてみちゃう
by
株式会社オプト 仙台ラボラトリ
PWA 総まとめ @ABC 2018 Spring
by
Ryu Shindo
Let's try to use Background sync
by
Hirata Tomoko
Cache 自由自在
by
Ryu Shindo
Service Workers Push API Hands-on
by
Takenori Nakagawa
W3C Push の話
by
Tamaki Shintaro
進化する Web ~ Progressive Web Apps の実装と応用 ~
by
Microsoft Azure Japan
Service Workers
by
Takenori Nakagawa
Challenge PWA!! WordCamp Tokyo 2018
by
Ryu Shindo
ServiceWorkerでつくるWebの未来
by
Yoshiki Kobayashi
Web Worker +α - HTML5/JavaScript and Service Worker API
by
Ken William
WordPressサイトをスマホアプリにしちゃおう!
by
Ryu Shindo
Service Worker を知る
by
kasikasikasi
第49回HTML5勉強会 Google I/O 2014サマリー
by
Takuya Oikawa
wordcamp haneda 20190420 Apps Based on WordPress
by
Ryu Shindo
Offline Drupal with progressive web app
by
Théodore Biadala
モダンWeb開発ワークショップ
by
Staffnet_Inc
Service Workerとは何者か
by
Ryu Shindo
Recently uploaded
PDF
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
by
NTT DATA Technology & Innovation
PPTX
DrupalCon Nara 2025の記録 .
by
iPride Co., Ltd.
PDF
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
by
Sugiyama Yugo
PDF
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
by
たけおか しょうぞう
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
by
PC Cluster Consortium
PDF
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
by
TomohiroKusu
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
by
NTT DATA Technology & Innovation
DrupalCon Nara 2025の記録 .
by
iPride Co., Ltd.
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
by
Sugiyama Yugo
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
by
たけおか しょうぞう
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
by
PC Cluster Consortium
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
by
TomohiroKusu
Service worker が拓く mobile web の新しいかたち
1.
ServiceWorker が拓く Mobile Web
の新しいかたち HTML5とか勉強会 02/25/2015 Kinuko Yasuda (@kinu) kinuko@chromium.org HTML5とか勉強会 02/25/2015 Kinuko Yasuda (@kinu) kinuko@chromium.org ServiceWorker が拓く Mobile Web の新しいかたち
2.
自己紹介: Kinuko Yasuda @kinu /
kinuko@chromium.org Chrome エンジニア 5年目くらい ■ ストレージ、ネットワーク、Worker系など裏方っぽい API をよくいじっています ■ File/Blob, FileSystem, Quota, XHR, Web Workers, ServiceWorker などなど ■ 2013年秋頃からは主に ServiceWorker
3.
今日話す内容 ServiceWorker が “拓く” Mobile
Web の “新しいかたち” ■ なぜ ServiceWorker は Exciting なの? ■ つまり ServiceWorker とは何なの? ■ どうやって使うの? ■ セキュリティはどうなってるの? ■ いつから試してみるべき? Disclaimer: ここで話す内容は私の個人的な意見に基づくもので あり、私の雇用者とは関係ありません
4.
なぜ ServiceWorker が Exciting
なのか?
5.
Web is Awesome!! オープン仕様 リンクによる導線 常に最新のコンテンツ インストール不要 Mashupの容易さ プラットフォーム中立
6.
…ただしネットワークに接続していれば。
7.
■ Speed -
ロード時間 ■ Offline - オフライン時の UX ■ Re-engagement - Push通知などのユー ザ再訪を促す方法がない …そしてあらゆる場所に “Install App” のポップアップ Mobile 時代の Web の ”弱み”
8.
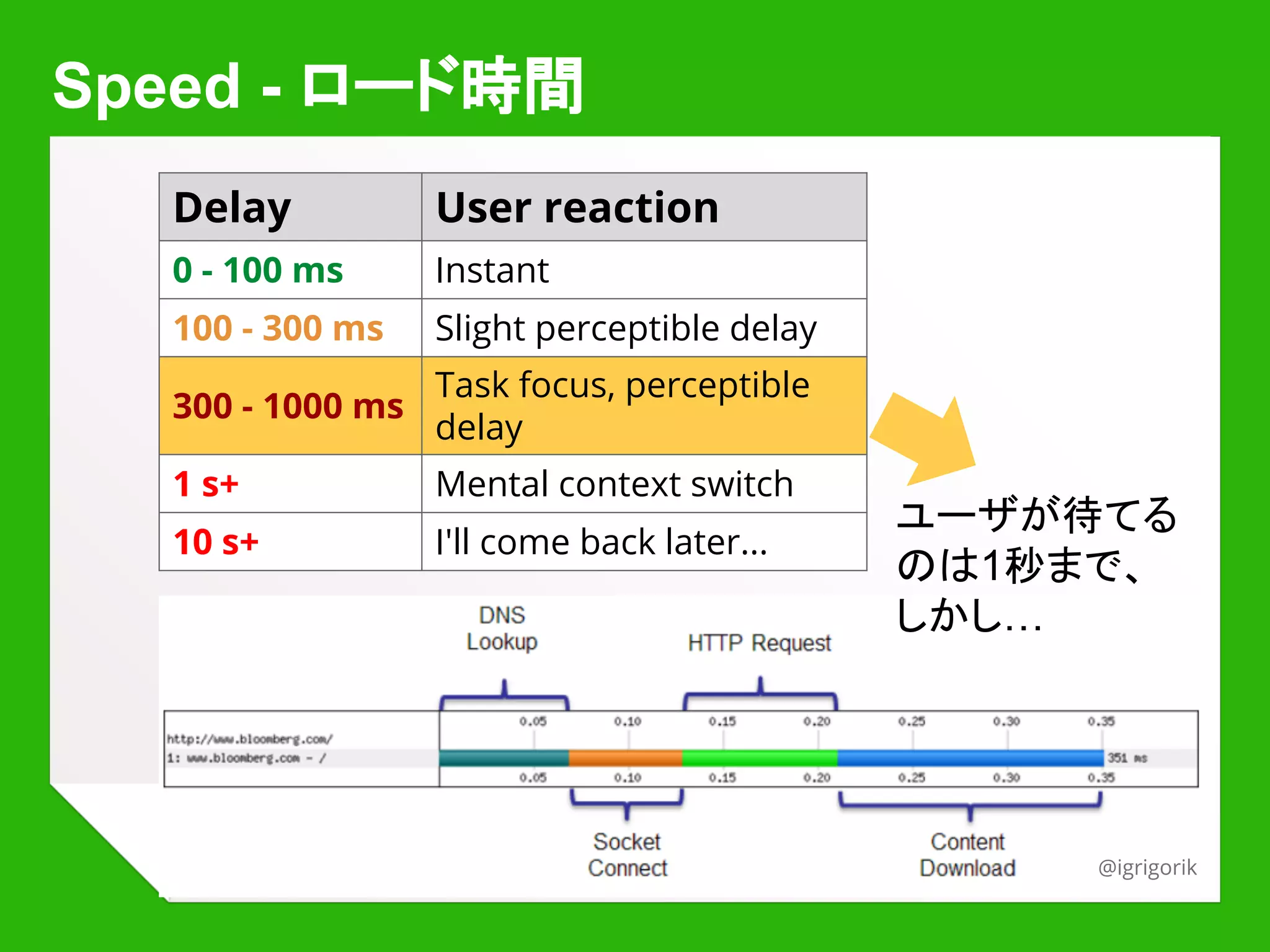
Speed - ロード時間 @igrigorik Delay
User reaction 0 - 100 ms Instant 100 - 300 ms Slight perceptible delay 300 - 1000 ms Task focus, perceptible delay 1 s+ Mental context switch 10 s+ I'll come back later... ユーザが待てる のは1秒まで、 しかし…
9.
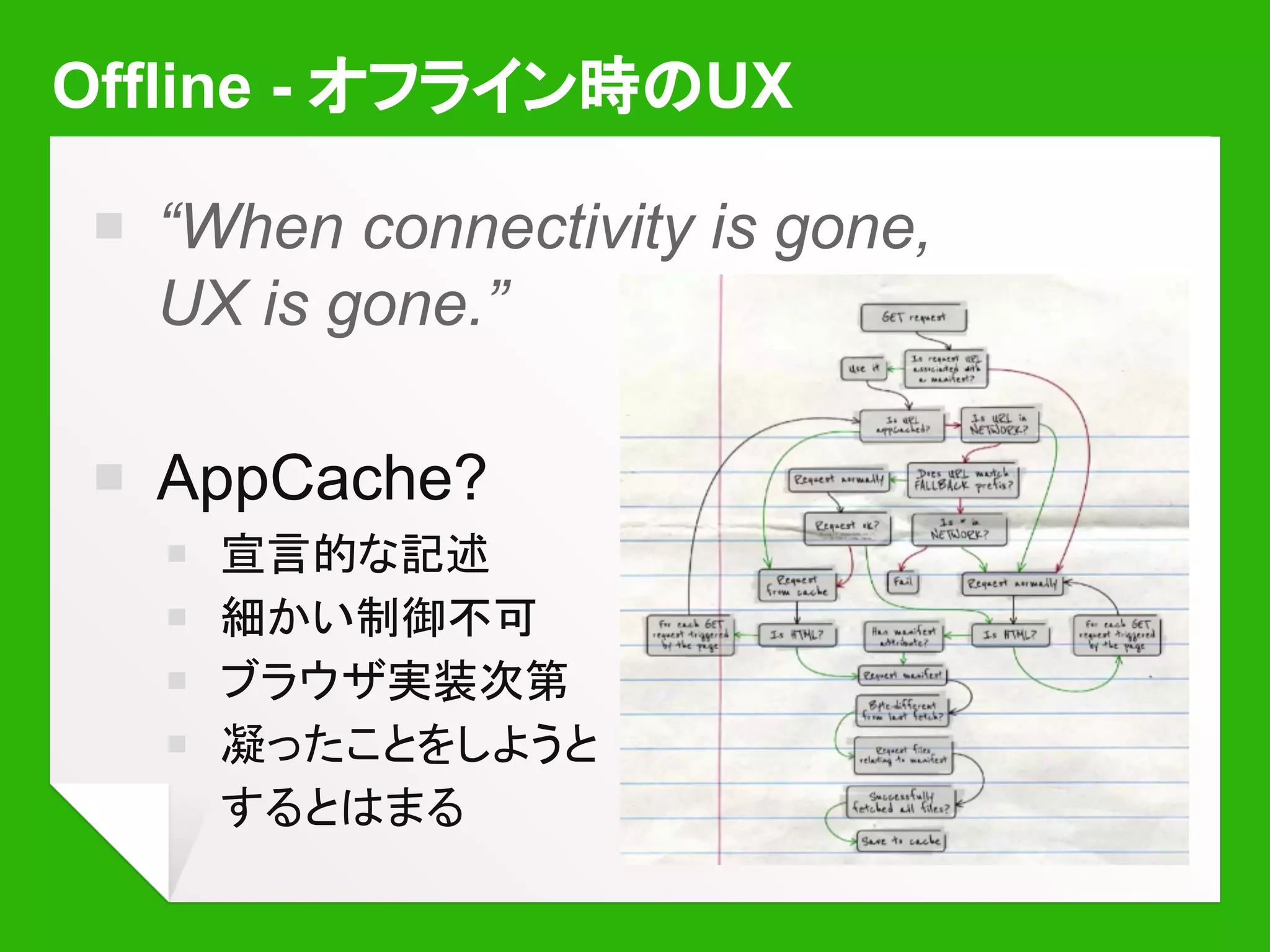
Offline - オフライン時のUX ■
“When connectivity is gone, UX is gone.” ■ AppCache? ■ 宣言的な記述 ■ 細かい制御不可 ■ ブラウザ実装次第 ■ 凝ったことをしようと するとはまる
10.
Re-engagement - Push通知の欠如 ■
ユーザが Tab を閉じたら終わり ■ 再訪を促す手段がない
11.
■ Speed -
ロード時間 ■ Offline - オフライン時の UX ■ Re-engagement - Push通知などのユー ザ再訪を促す方法がない → どれも Web の動作モデル から来るもの Web の強み ≒ Mobile Web の ”弱み”
12.
Webの動作モデル自体を拡張できるよう にする? できればブラウザの実装スピードに とらわれない形で。 → ServiceWorker
13.
ServiceWorkerとは 何なのか?
14.
ServiceWorkerとは? “AppCacheを置き換える 新しいオフラインAPI” “ブラウザ内で動作する JavaScriptネットワークプロキシ” “ネイティブ・アプリと Web の 間のギャップを埋める”
15.
改めて、ServiceWorkerとは ■ バックグラウンドで動作するJavaScript 実行環境 ■ DOMにはさわれない ■
ユーザインタラクションもできない じゃあこのJavaScript環境で 何ができるの? → ブラウザが内部でやっていたような ことを JS でいじれるようになる
16.
改めて、ServiceWorkerとは ■ バックグラウンドで動作するJavaScript 実行環境 ■ DOMにはさわれない ■
ユーザインタラクションもできない ■ フォアグラウンドのWebページと 対になって動作 ■ ページのネットワークリクエストを横取りできる ■ ページを開いたりメッセージ通信したりできる ■ Push通知を受け取れる ■ Fetch, Cache などの低レイヤAPIが使える (*) (*) Fetch, Cache は普通のページからも使えるようになることが予定されています
17.
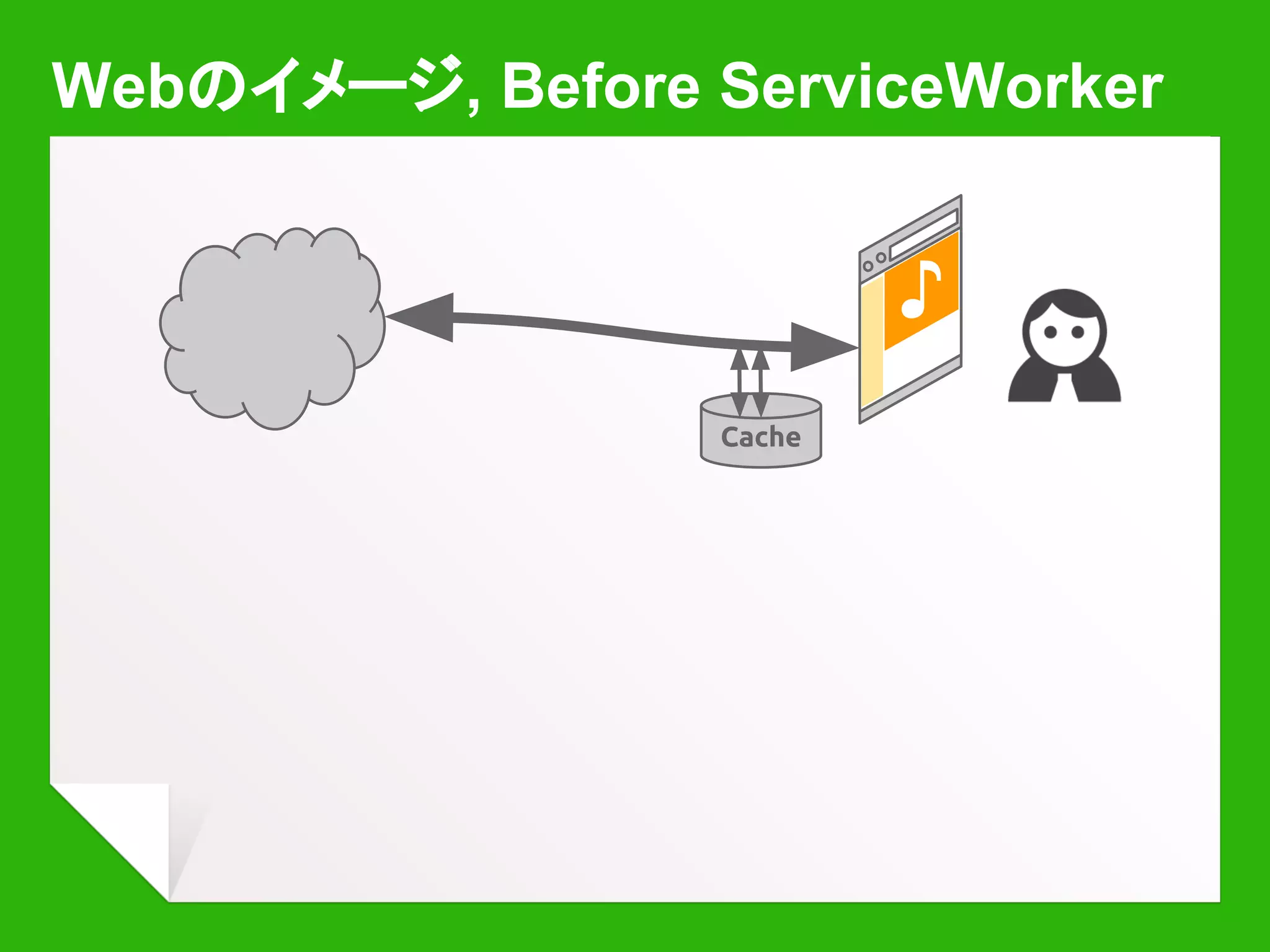
Webのイメージ, Before ServiceWorker Cache ♪
18.
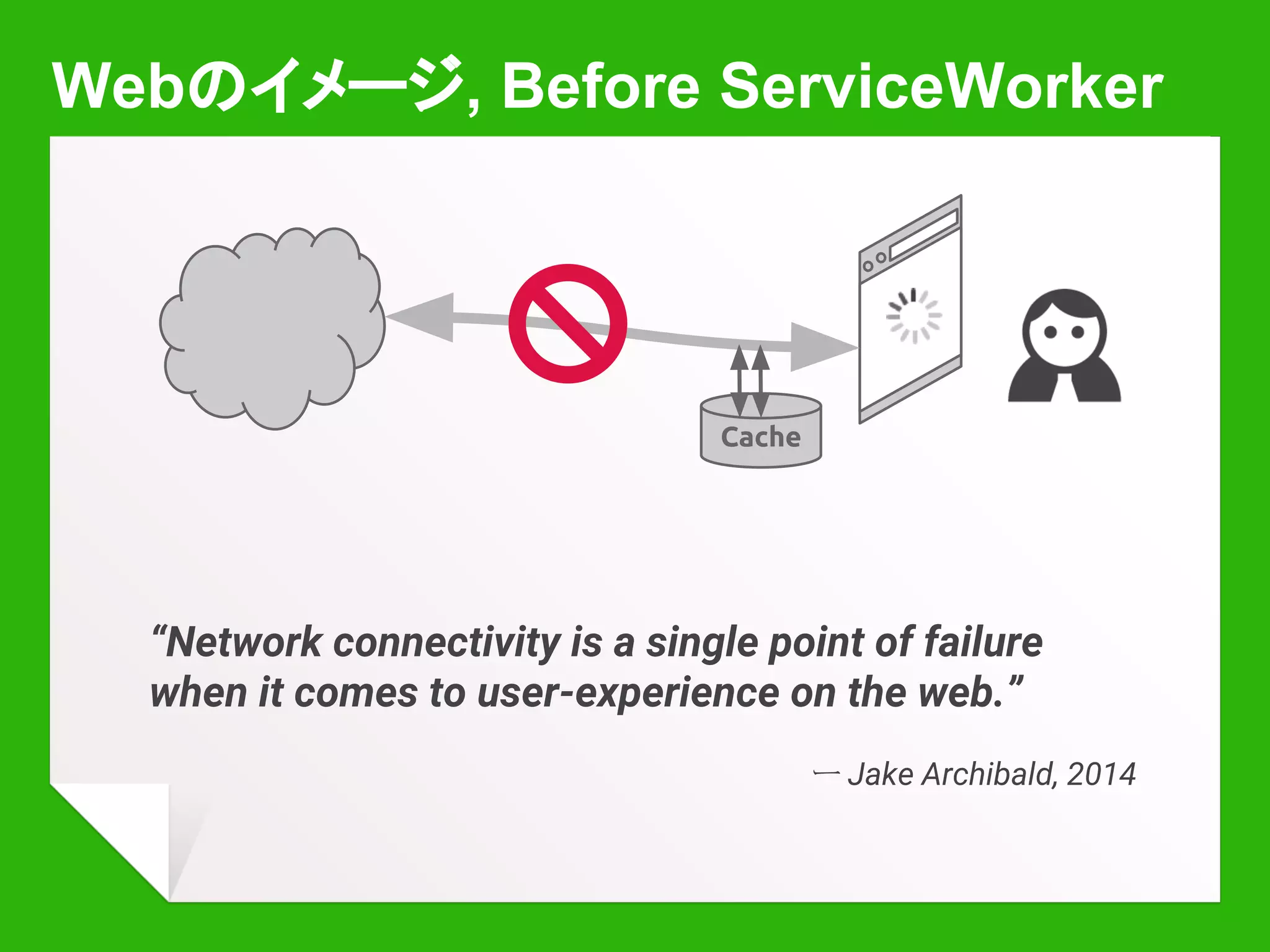
Webのイメージ, Before ServiceWorker Cache “Network
connectivity is a single point of failure when it comes to user-experience on the web.” ー Jake Archibald, 2014
19.
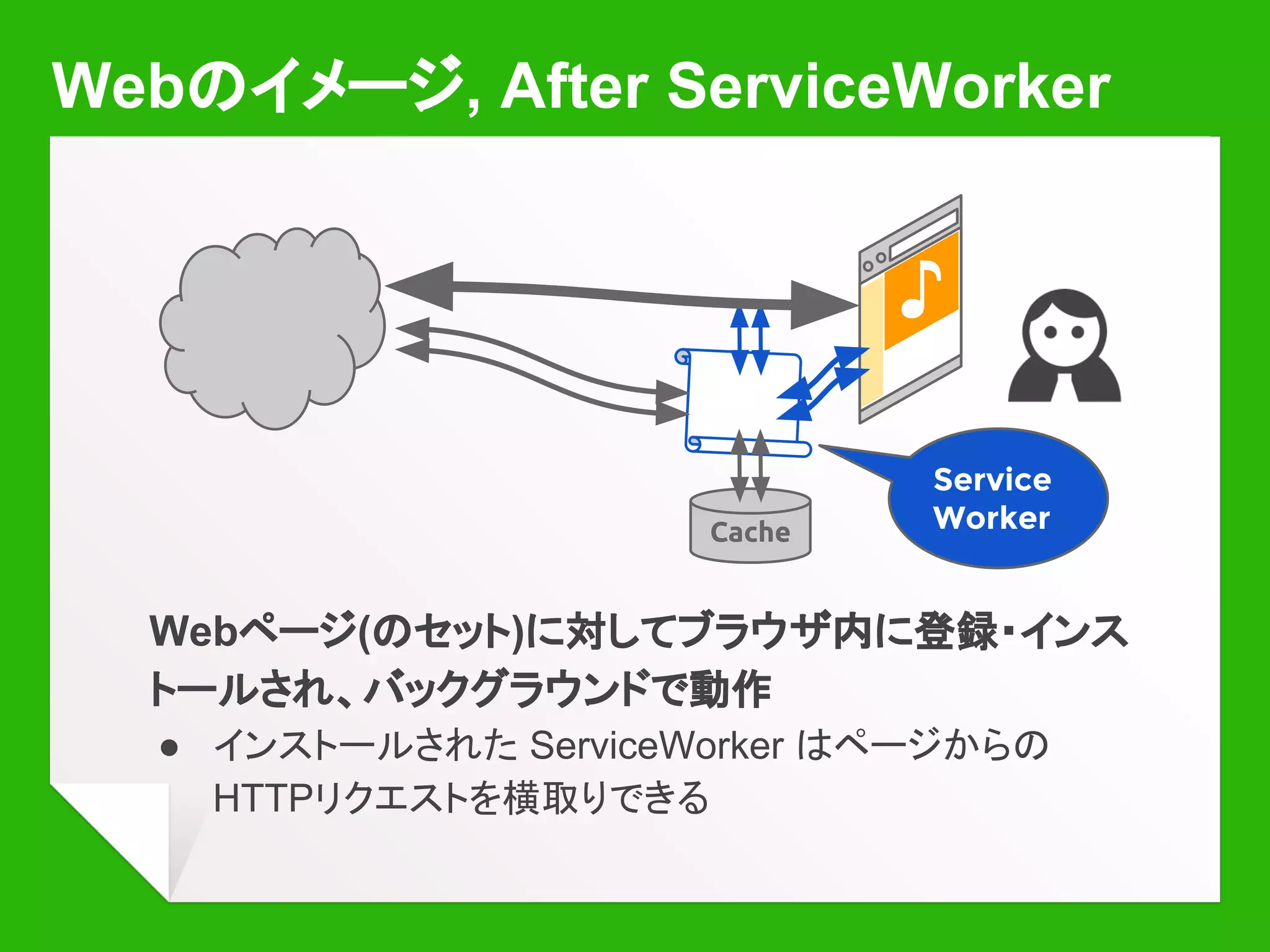
Webのイメージ, After ServiceWorker Cache Service Worker Webページ(のセット)に対してブラウザ内に登録・インス トールされ、バックグラウンドで動作 ●
インストールされた ServiceWorker はページからの HTTPリクエストを横取りできる ♪
20.
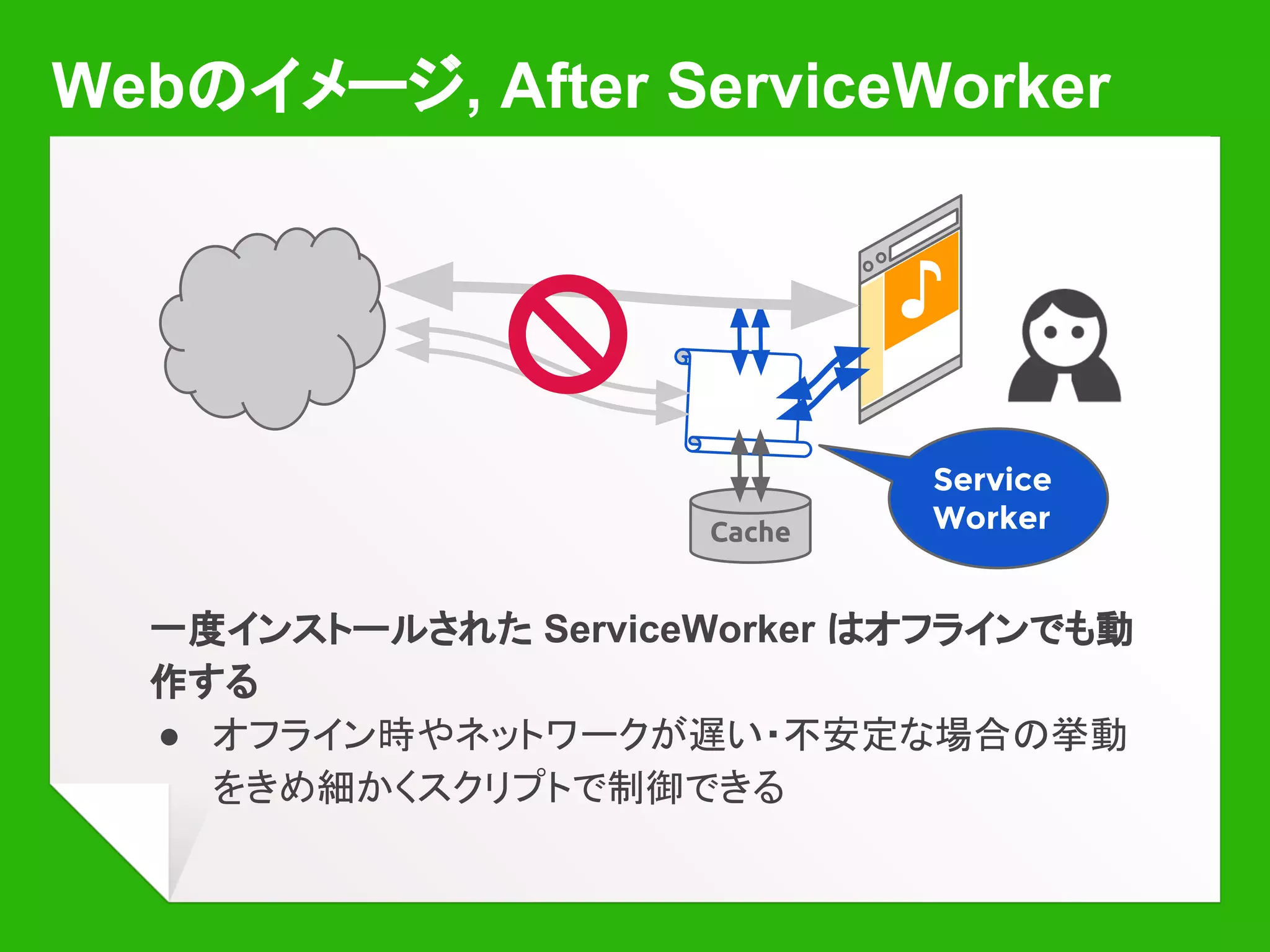
Webのイメージ, After ServiceWorker Cache Service Worker 一度インストールされた
ServiceWorker はオフラインでも動 作する ● オフライン時やネットワークが遅い・不安定な場合の挙動 をきめ細かくスクリプトで制御できる ♪
21.
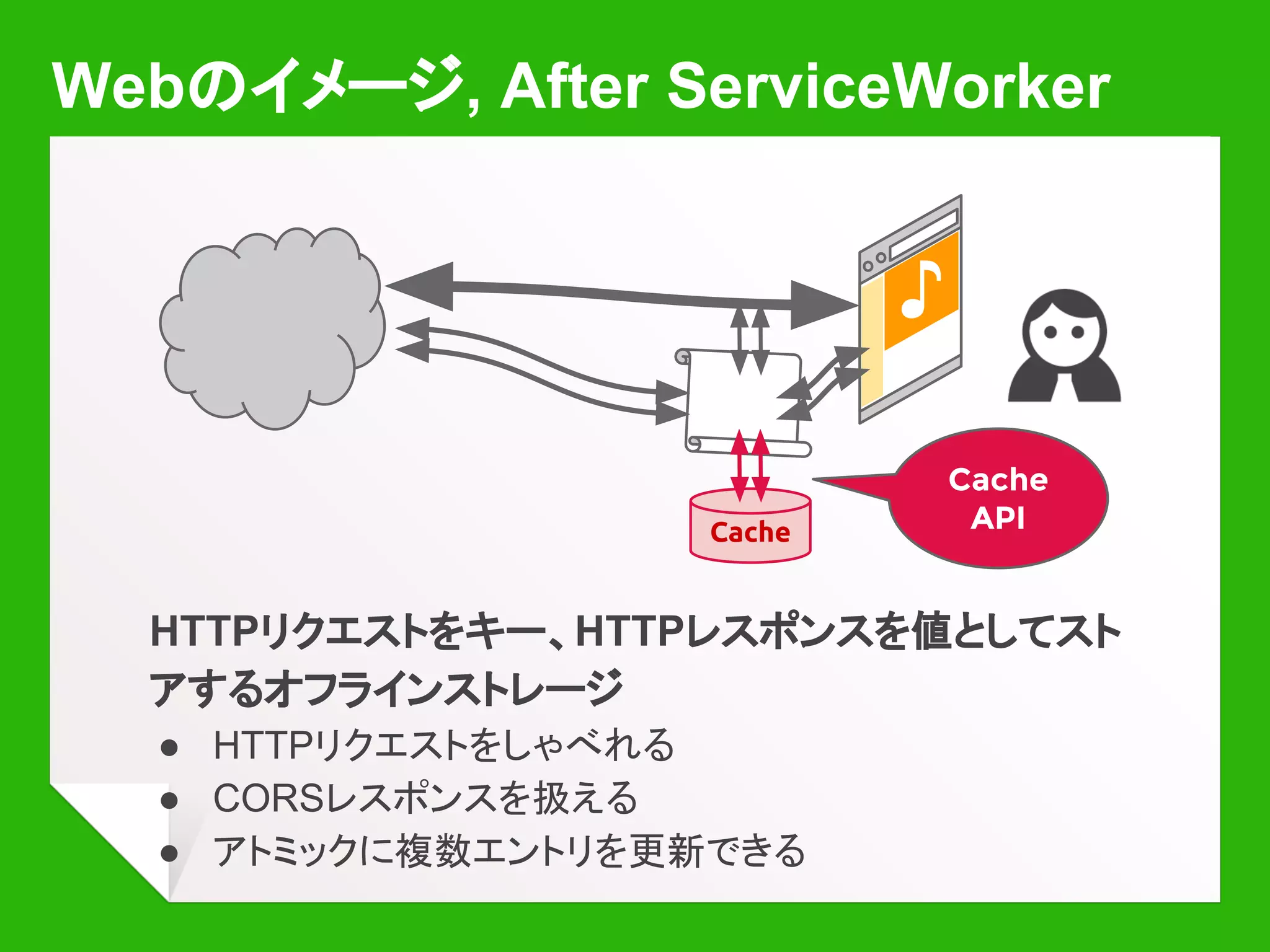
Webのイメージ, After ServiceWorker Cache Cache API ♪ HTTPリクエストをキー、HTTPレスポンスを値としてスト アするオフラインストレージ ●
HTTPリクエストをしゃべれる ● CORSレスポンスを扱える ● アトミックに複数エントリを更新できる
22.
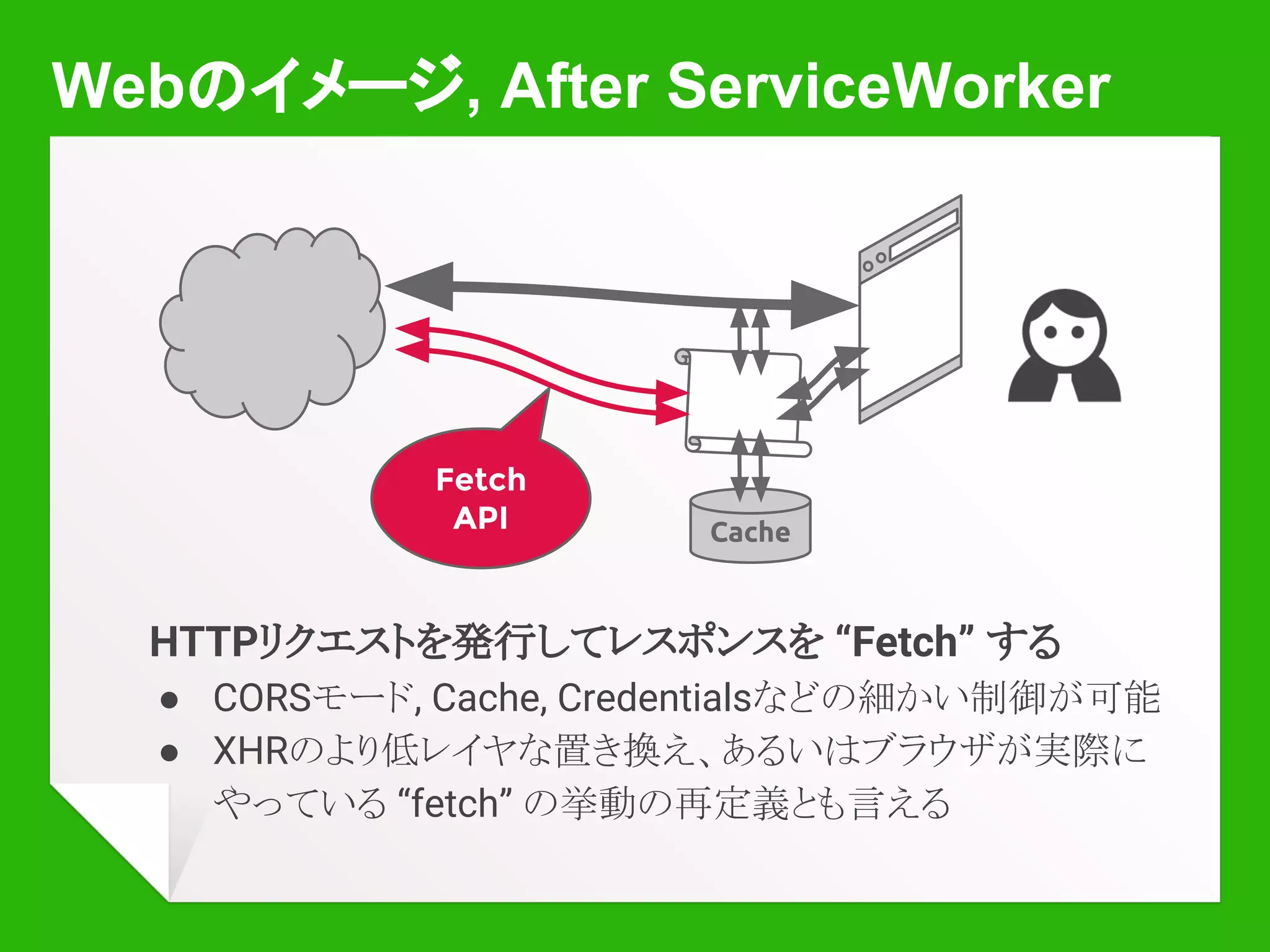
Webのイメージ, After ServiceWorker Cache Fetch API HTTPリクエストを発行してレスポンスを
“Fetch” する ● CORSモード, Cache, Credentialsなどの細かい制御が可能 ● XHRのより低レイヤな置き換え、あるいはブラウザが実際に やっている “fetch” の挙動の再定義とも言える
23.
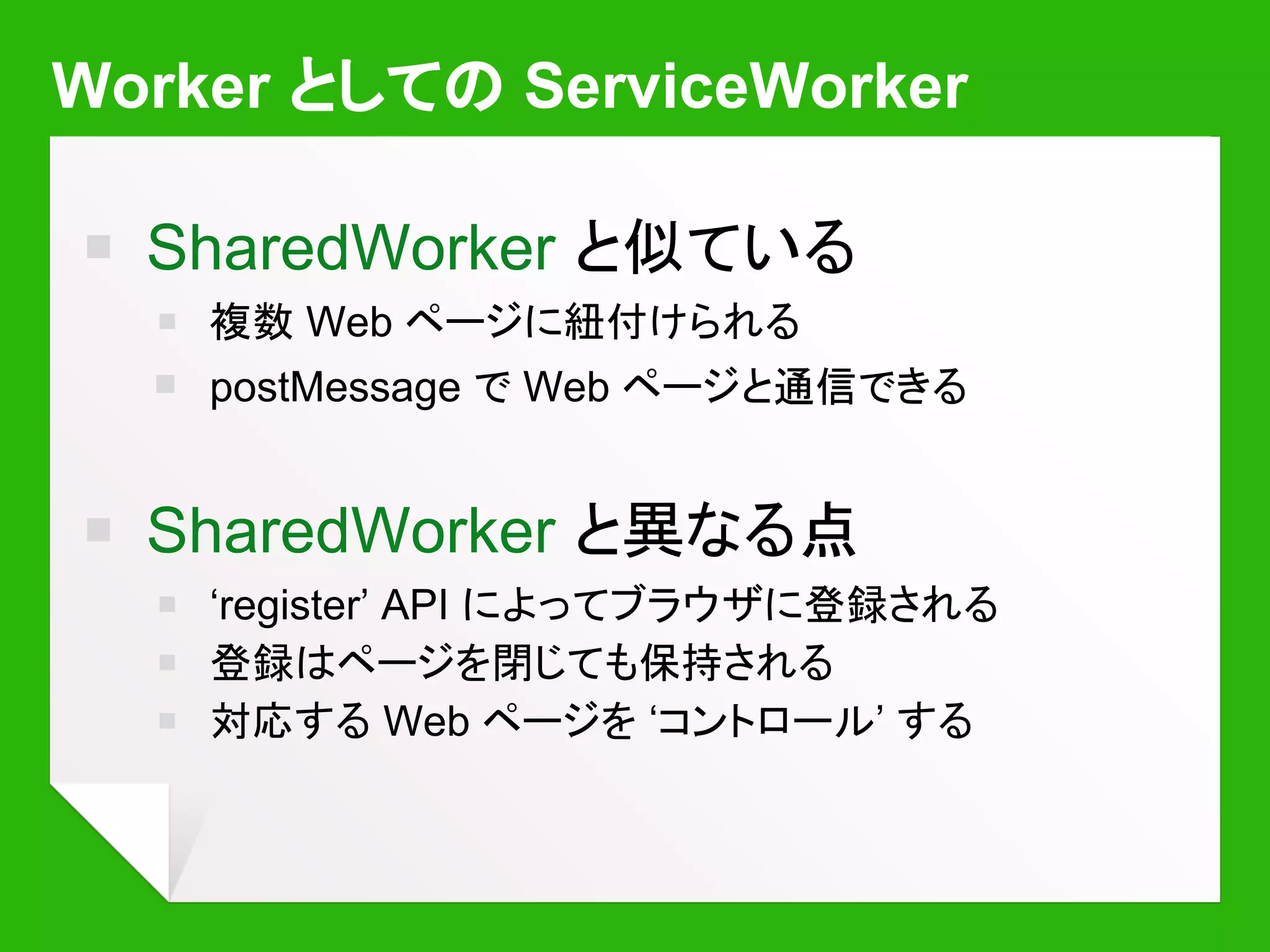
Worker としての ServiceWorker ■
SharedWorker と似ている ■ 複数 Web ページに紐付けられる ■ postMessage で Web ページと通信できる ■ SharedWorker と異なる点 ■ ‘register’ API によってブラウザに登録される ■ 登録はページを閉じても保持される ■ 対応する Web ページを ‘コントロール’ する
24.
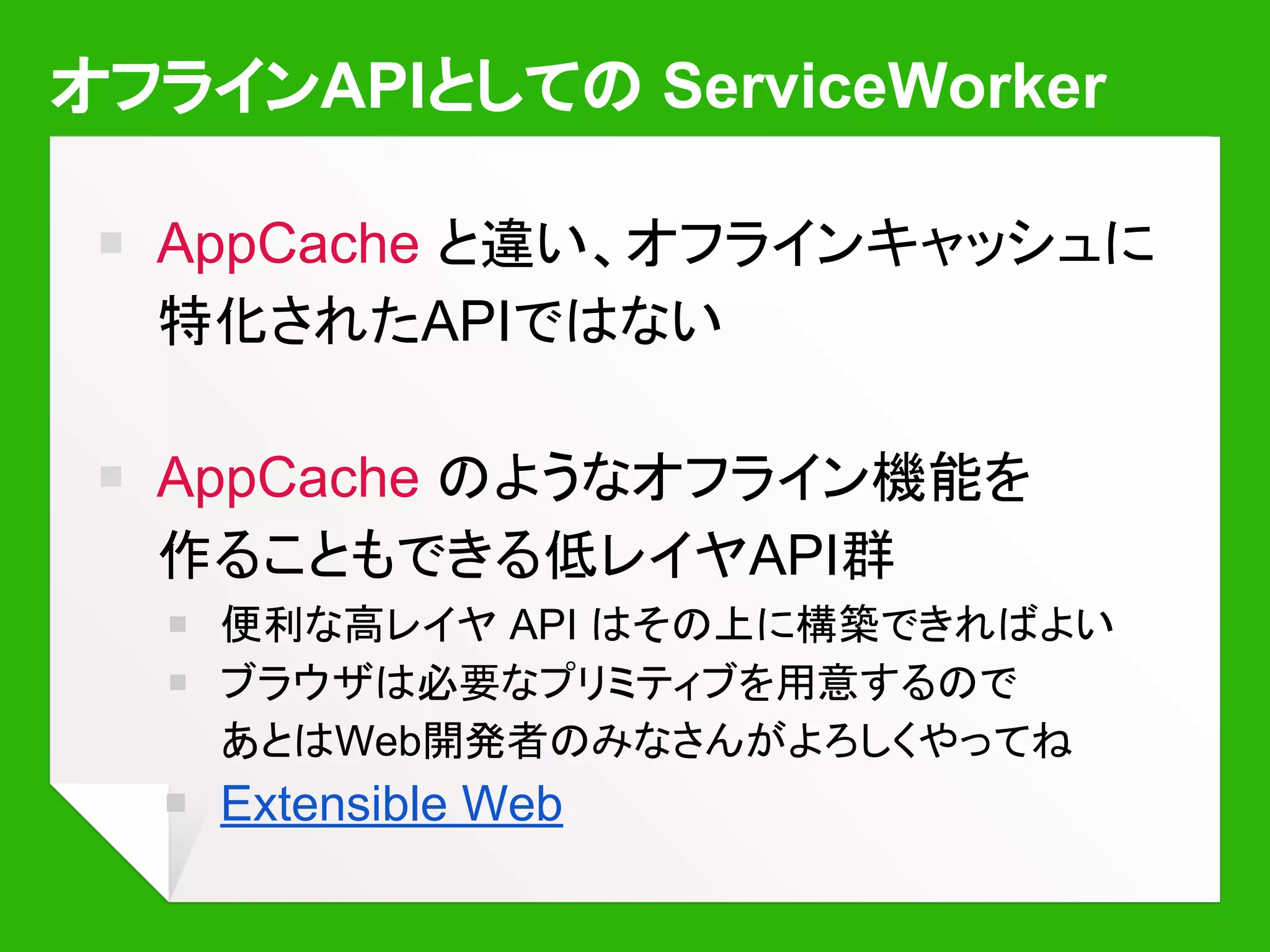
オフラインAPIとしての ServiceWorker ■ AppCache
と違い、オフラインキャッシュに 特化されたAPIではない ■ AppCache のようなオフライン機能を 作ることもできる低レイヤAPI群 ■ 便利な高レイヤ API はその上に構築できればよい ■ ブラウザは必要なプリミティブを用意するので あとはWeb開発者のみなさんがよろしくやってね ■ Extensible Web
25.
ServiceWorker を 使ってみる
26.
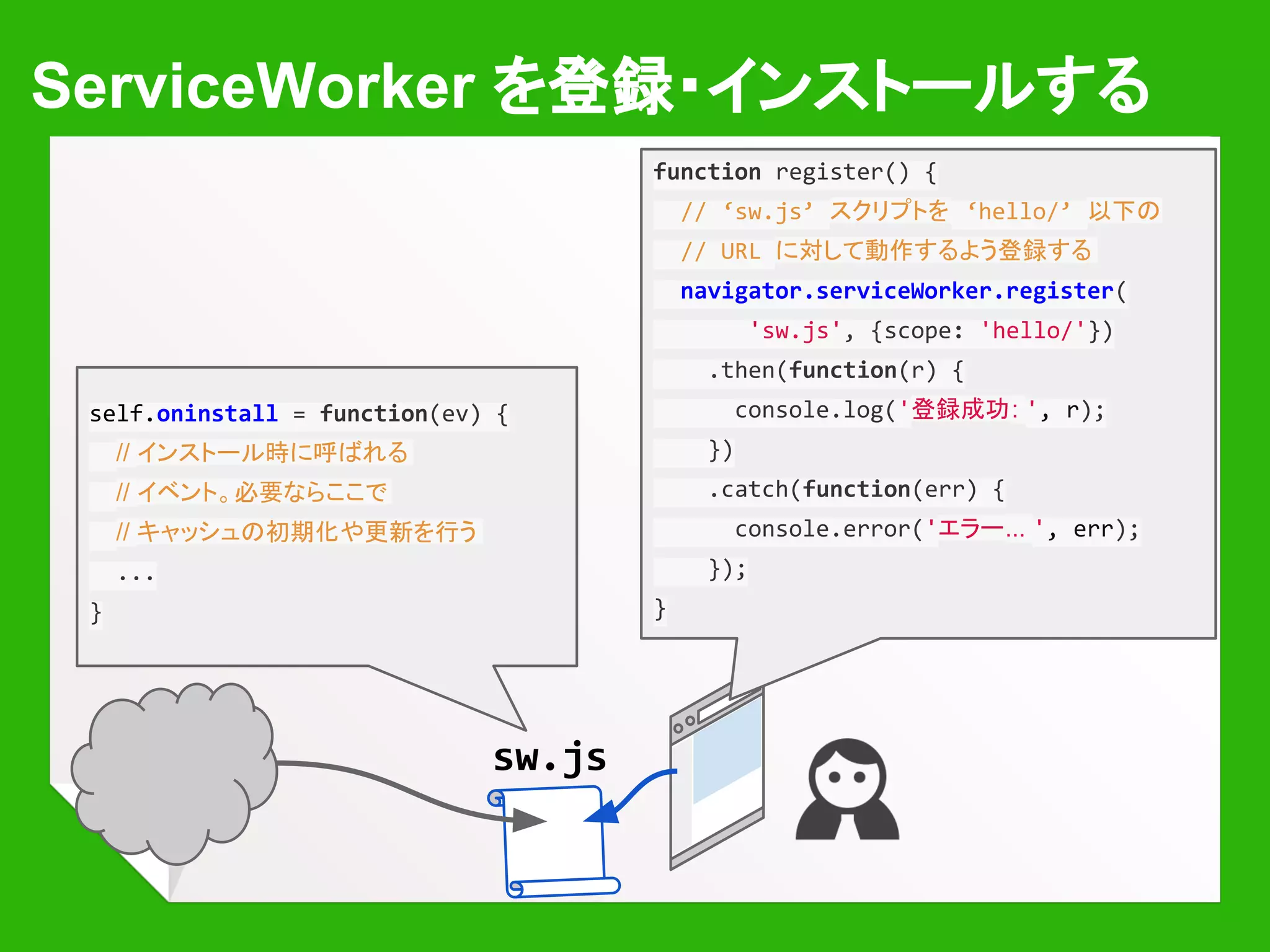
ServiceWorker を登録・インストールする function register()
{ // ‘sw.js’ スクリプトを ‘hello/’ 以下の // URL に対して動作するよう登録する navigator.serviceWorker.register( 'sw.js', {scope: 'hello/'}) .then(function(r) { console.log('登録成功: ', r); }) .catch(function(err) { console.error('エラー... ', err); }); } self.oninstall = function(ev) { // インストール時に呼ばれる // イベント。必要ならここで // キャッシュの初期化や更新を行う ... } sw.js
27.
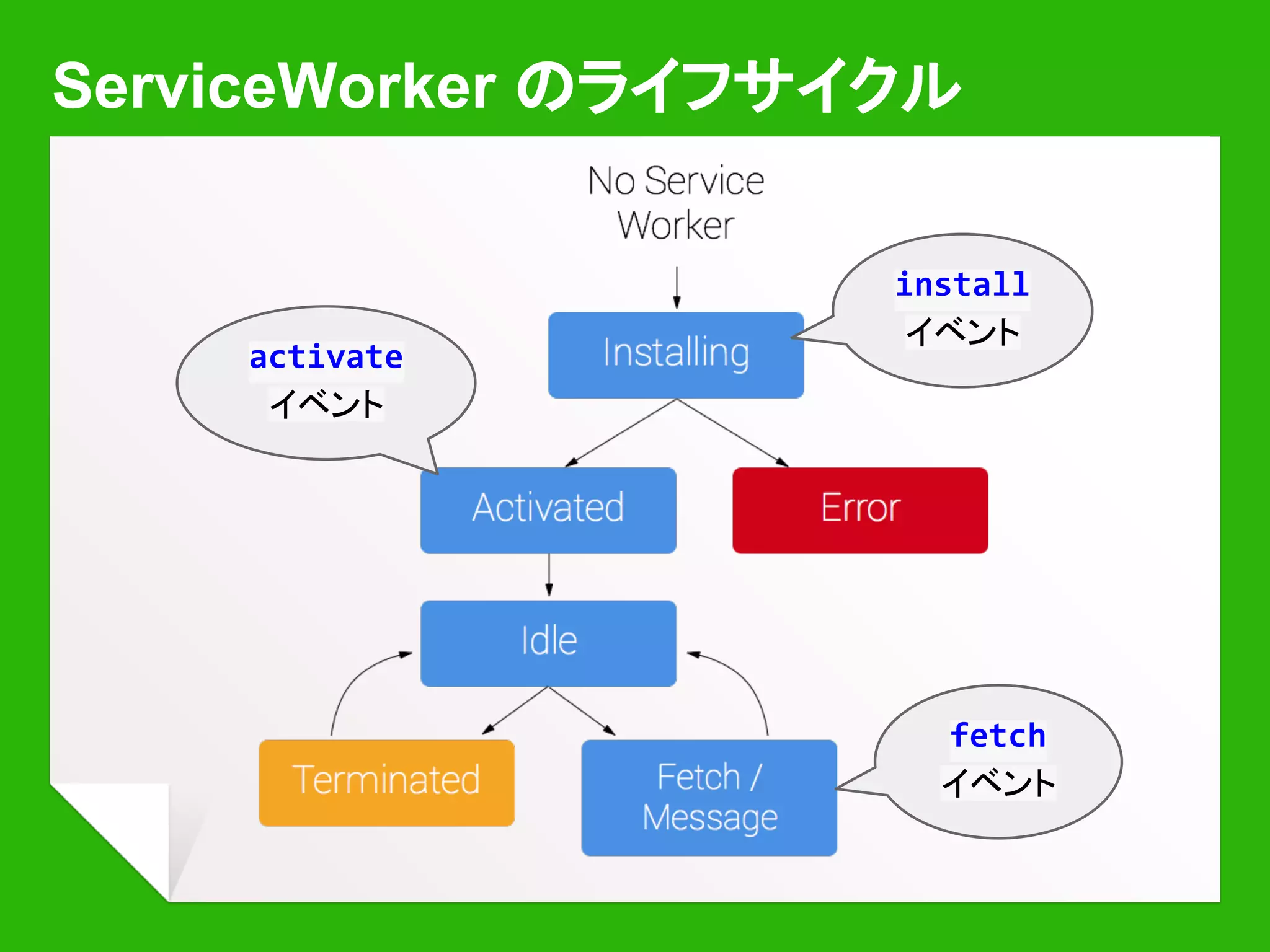
ServiceWorker のライフサイクル install イベント activate イベント fetch イベント
28.
ServiceWorker のイベント ■ install ■
ServiceWorker が登録されるときに呼ばれる ■ 例:キャッシュデータの初期化など ■ activate ■ 新しい ServiceWorker がページをコントロール しはじめるときに呼ばれる ■ 例:古いキャッシュデータを消すなど ■ fetch ■ ページがHTTPリクエストを発行したときに 呼ばれる (ページ遷移もしくはロード) ■ 例:キャッシュデータを代わりに返すなど
29.
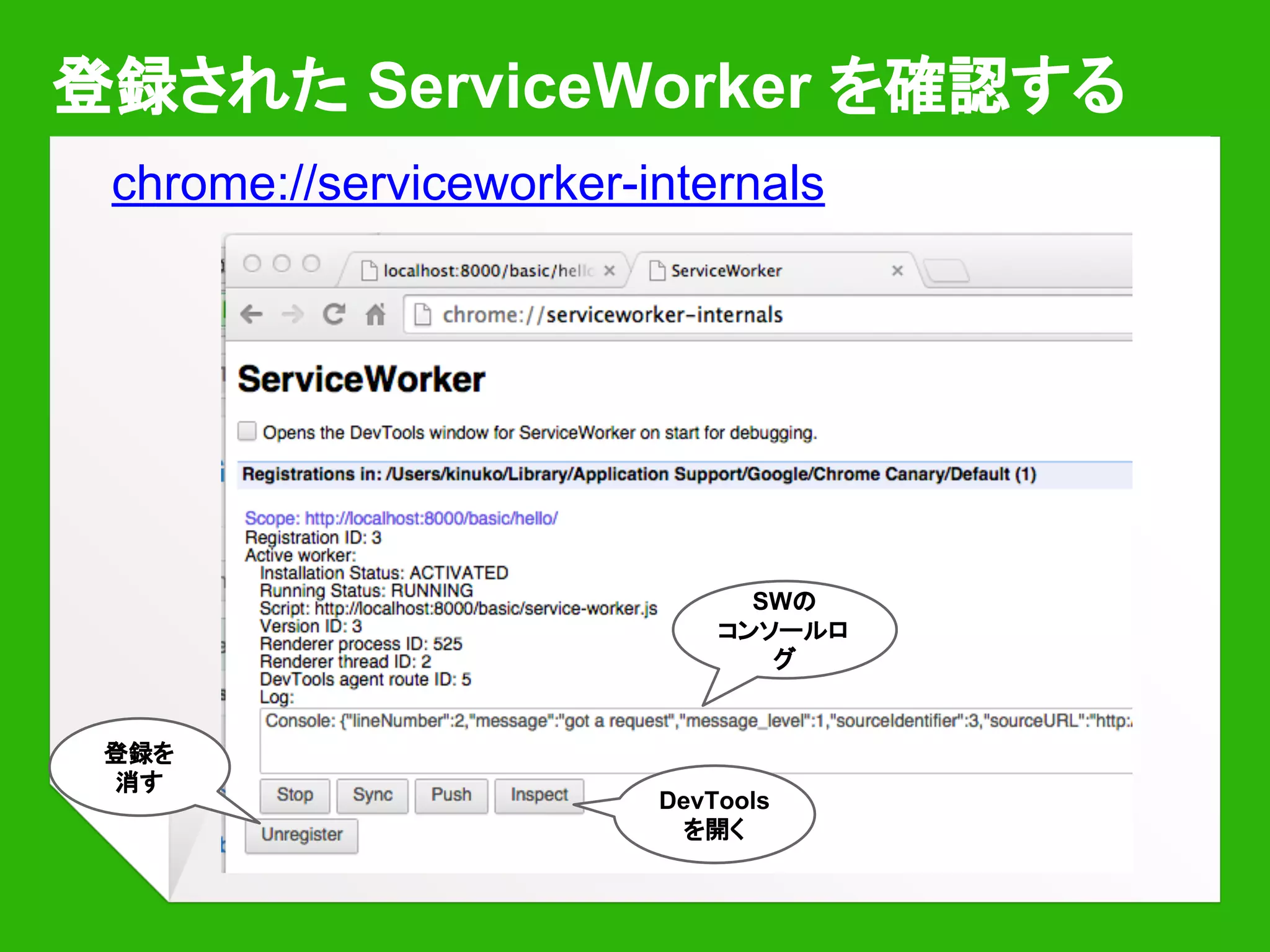
登録された ServiceWorker を確認する chrome://serviceworker-internals DevTools を開く 登録を 消す SWの コンソールロ グ
30.
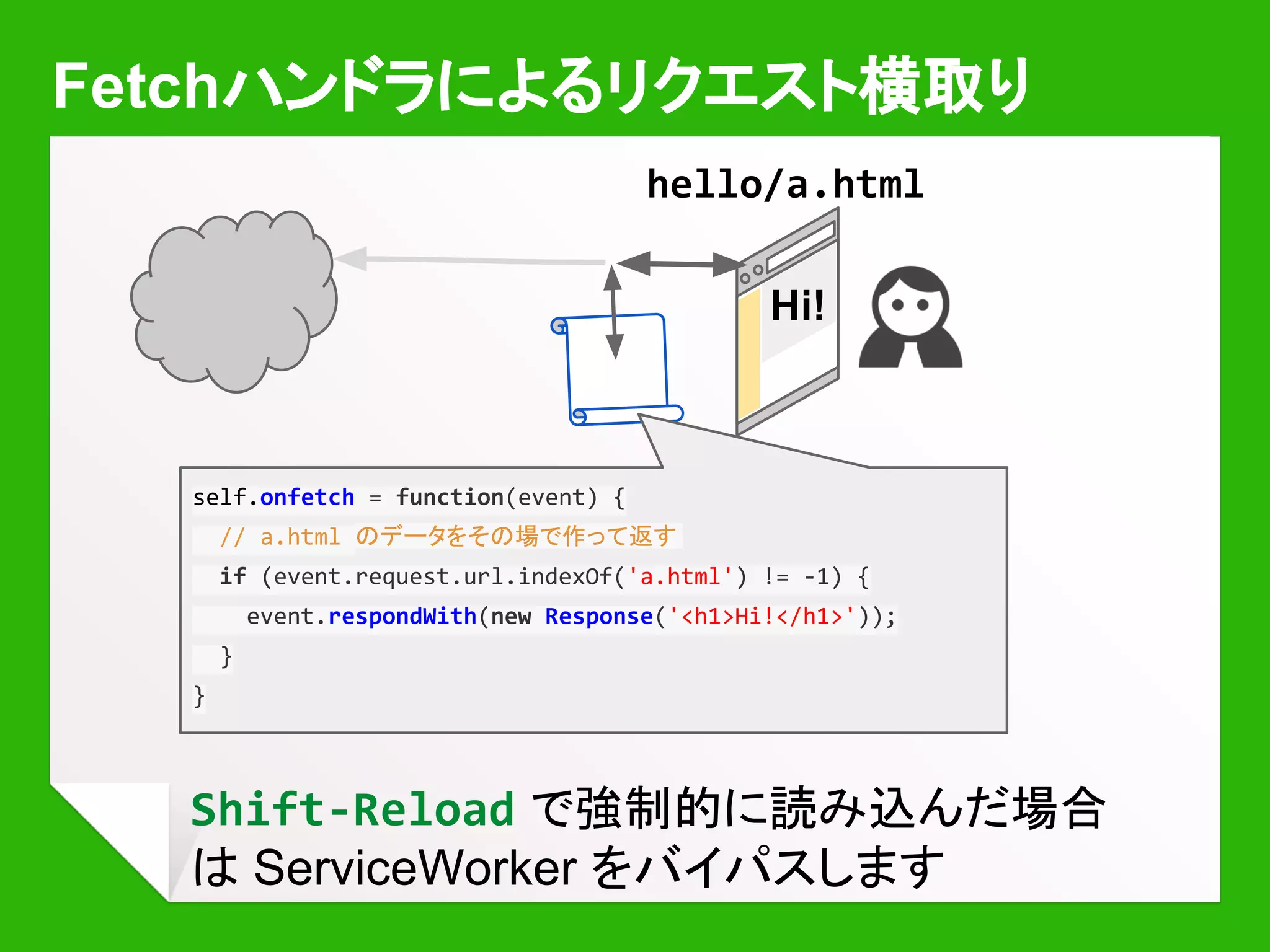
Fetchハンドラによるリクエスト横取り self.onfetch = function(event)
{ // a.html のデータをその場で作って返す if (event.request.url.indexOf('a.html') != -1) { event.respondWith(new Response('<h1>Hi!</h1>')); } } Hi! hello/a.html Shift-Reload で強制的に読み込んだ場合 は ServiceWorker をバイパスします
31.
Cache API を使う Cache //
未実装のメソッドがあるのでポリフィルが必要 // https://github.com/coonsta/cache-polyfill importScripts(‘cache-polyfill.js’); self.oninstall = function(ev) { ev.waitUntil( caches.open(‘v1’).then(function(cache) { return cache.add(‘/cat.png’); })); }; self.onfetch = function(ev) { if (ev.request.url.indexOf(‘png’) != -1) ev.respondWith(caches.match(‘/cat.png’)); }; scope 内のページ内の 画像をすべてネコの画像 に置き換える
32.
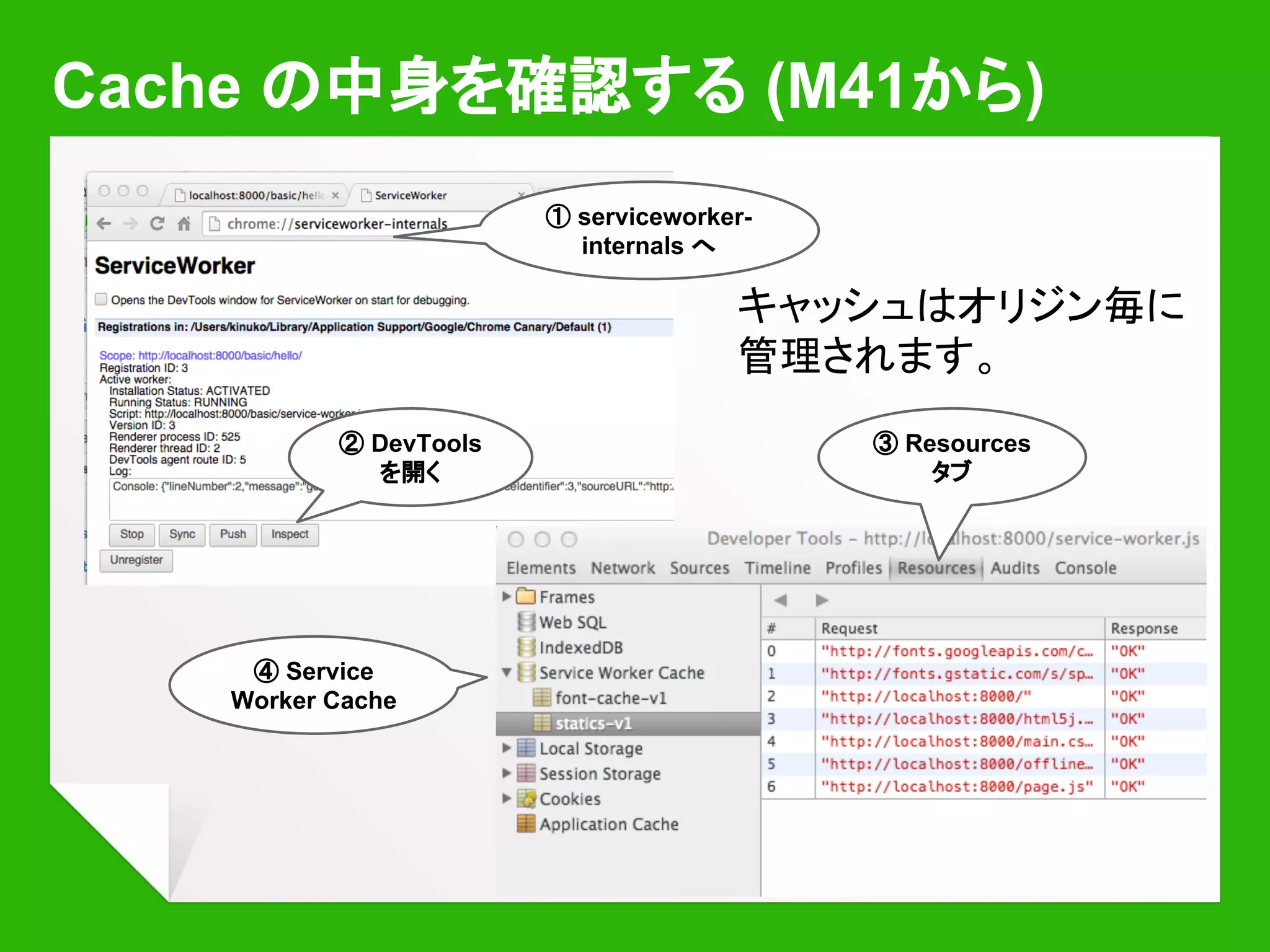
Cache の中身を確認する (M41から) ②
DevTools を開く ① serviceworker- internals へ ③ Resources タブ ④ Service Worker Cache キャッシュはオリジン毎に 管理されます。
33.
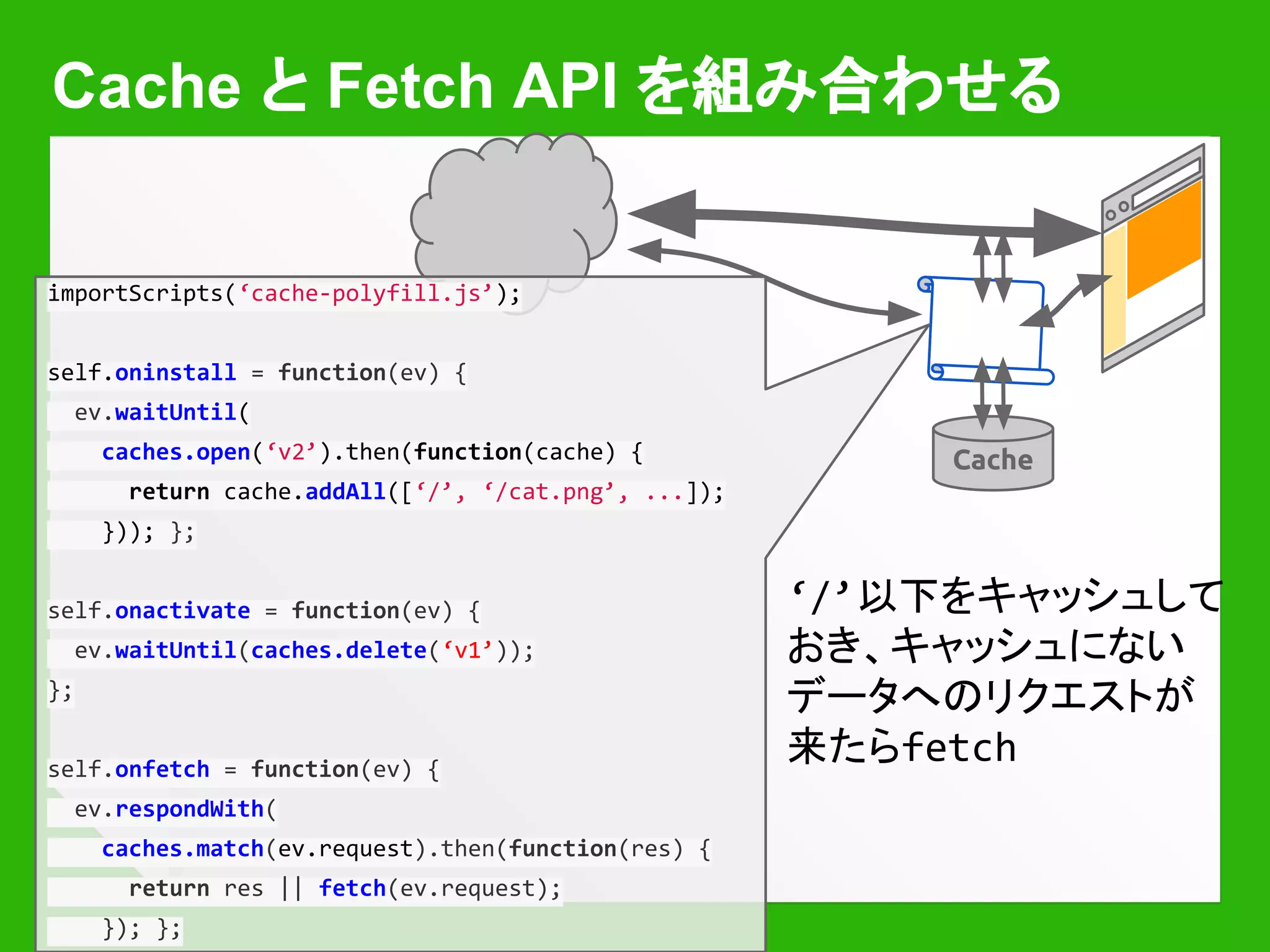
Cache と Fetch
API を組み合わせる Cache importScripts(‘cache-polyfill.js’); self.oninstall = function(ev) { ev.waitUntil( caches.open(‘v2’).then(function(cache) { return cache.addAll([‘/’, ‘/cat.png’, ...]); })); }; self.onactivate = function(ev) { ev.waitUntil(caches.delete(‘v1’)); }; self.onfetch = function(ev) { ev.respondWith( caches.match(ev.request).then(function(res) { return res || fetch(ev.request); }); }; ‘/’以下をキャッシュして おき、キャッシュにない データへのリクエストが 来たらfetch
34.
Fetch と Cache
の組み合わせ例 ■ キャッシュの中身をまず表示して後からネット ワークから取ってきた内容で更新 ■ ストレスの少ないブラウジング ■ 普通のアプリのような挙動 ■ Background Sync と組み合わせればオンラインのときにキャッ シュを更新できるように ■ テンプレートをキャッシュしておいて内容だけ ネットワークから取得 ■ ロード時間の短縮 ネットワーク状況にかかわらずきめ細かいUXの 設計ができるようになる
35.
Fetch API が返す
Response ■ basic filtered ■ 同一オリジンでリダイレクトでもない ■ Set-Cookie, Set-Cookie2 だけがフィルタされる ■ cors filtered ■ リクエストが cors もしくは cors-with-preflight で同一 オリジンではない ■ Cache-Control, Content-Type など一部を除きすべ てのヘッダがフィルタされる ■ opaque filtered ■ リクエストが no-cors で同一オリジンではない ■ すべてのヘッダ, status, body がフィルタされる
36.
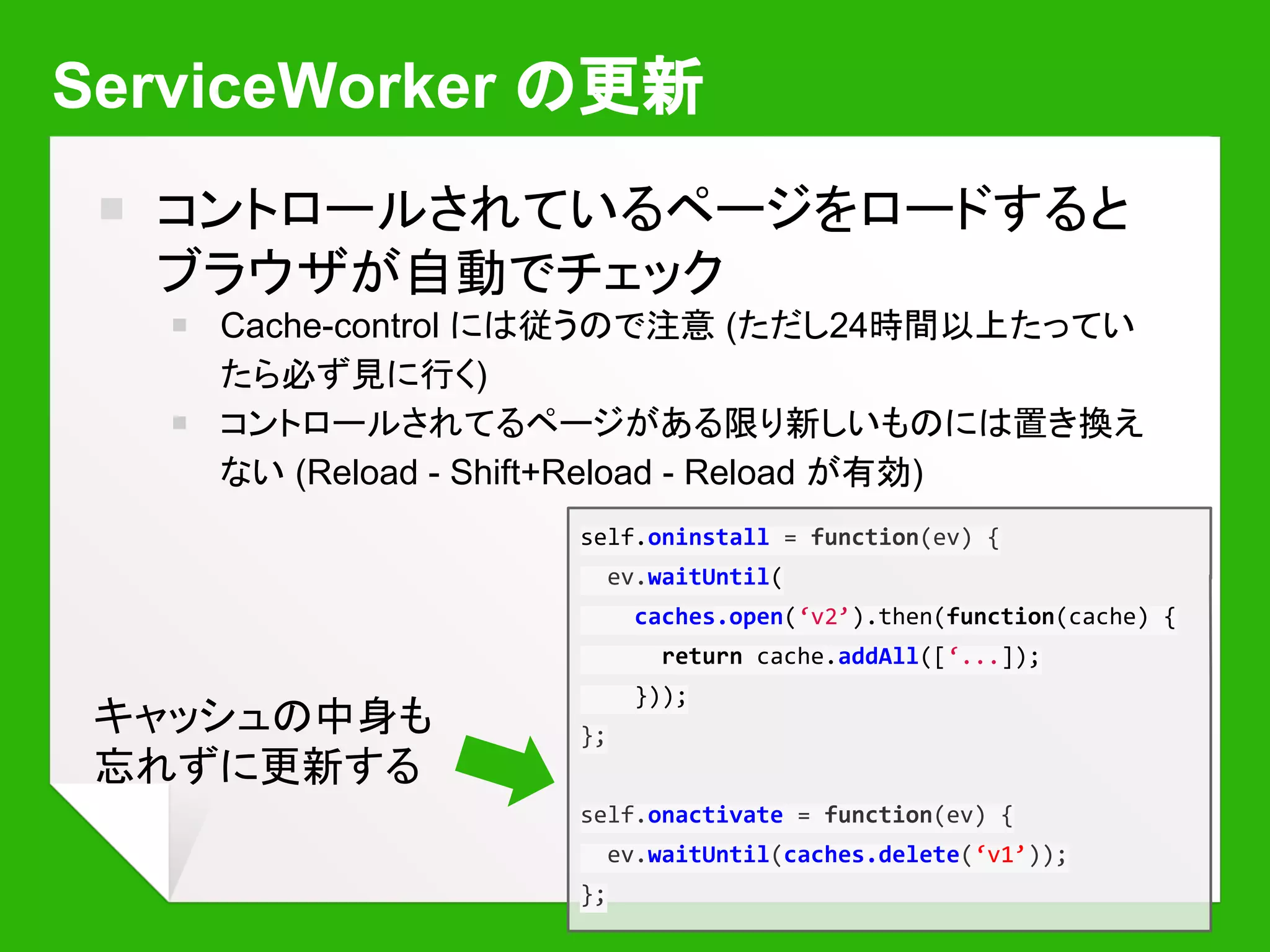
ServiceWorker の更新 ■ コントロールされているページをロードすると ブラウザが自動でチェック ■
Cache-control には従うので注意 (ただし24時間以上たってい たら必ず見に行く) ■ コントロールされてるページがある限り新しいものには置き換え ない (Reload - Shift+Reload - Reload が有効) self.oninstall = function(ev) { ev.waitUntil( caches.open(‘v2’).then(function(cache) { return cache.addAll([‘...]); })); }; self.onactivate = function(ev) { ev.waitUntil(caches.delete(‘v1’)); }; キャッシュの中身も 忘れずに更新する
37.
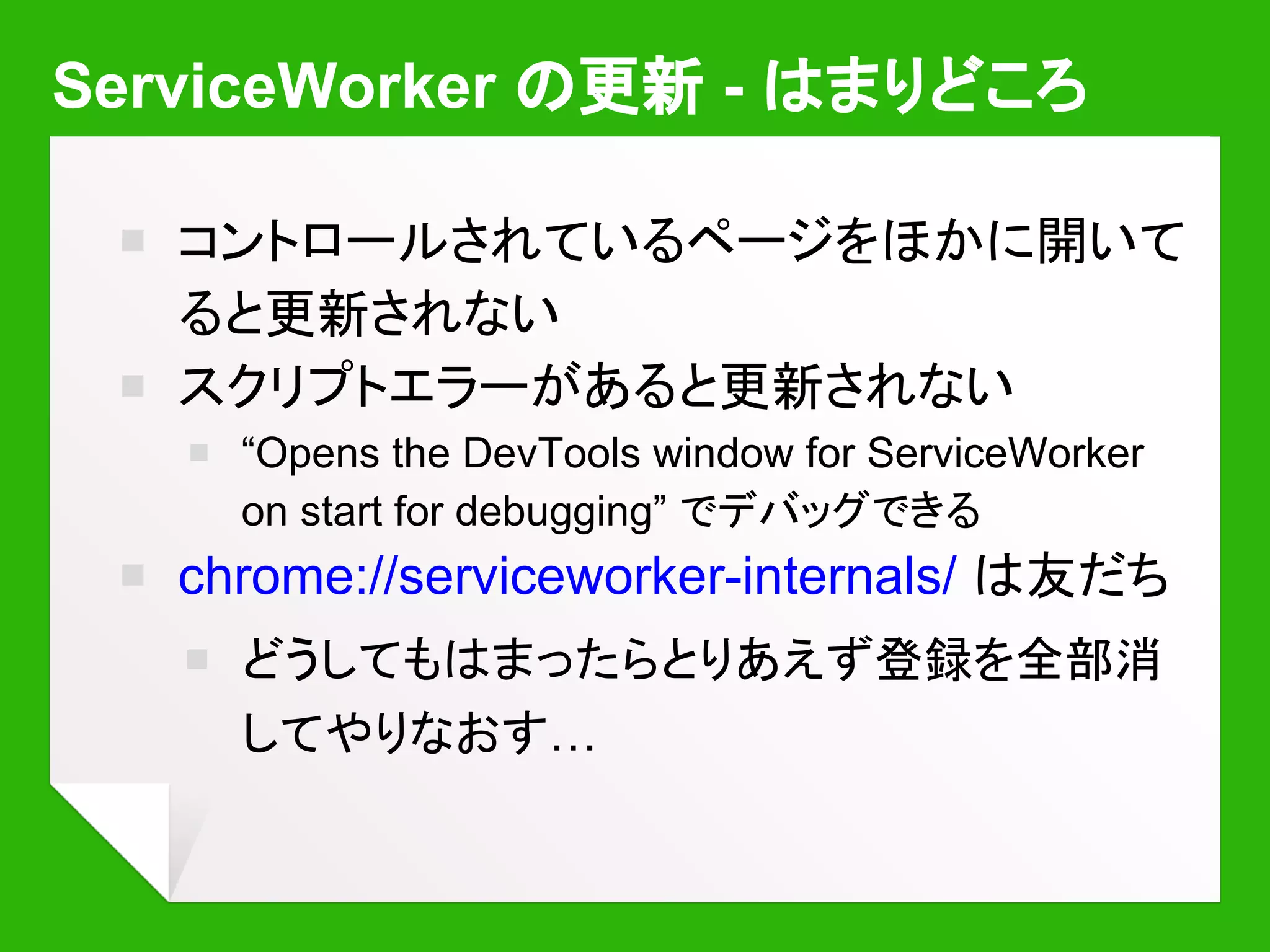
ServiceWorker の更新 -
はまりどころ ■ コントロールされているページをほかに開いて ると更新されない ■ スクリプトエラーがあると更新されない ■ “Opens the DevTools window for ServiceWorker on start for debugging” でデバッグできる ■ chrome://serviceworker-internals/ は友だち ■ どうしてもはまったらとりあえず登録を全部消 してやりなおす…
38.
■ https://kinu.github. io/ServiceWorkerOfflineBasic ■ https://events.google.com/io2015/ ■
https://horo-t.github. io/tiff2bmpsw/tiff2bmpsw.html デモ的なもの
39.
Push API (M42
から) ■ デモ: johnme-gcm.appspot. com/chat
40.
ServiceWorker セキュリティはどうなの?
41.
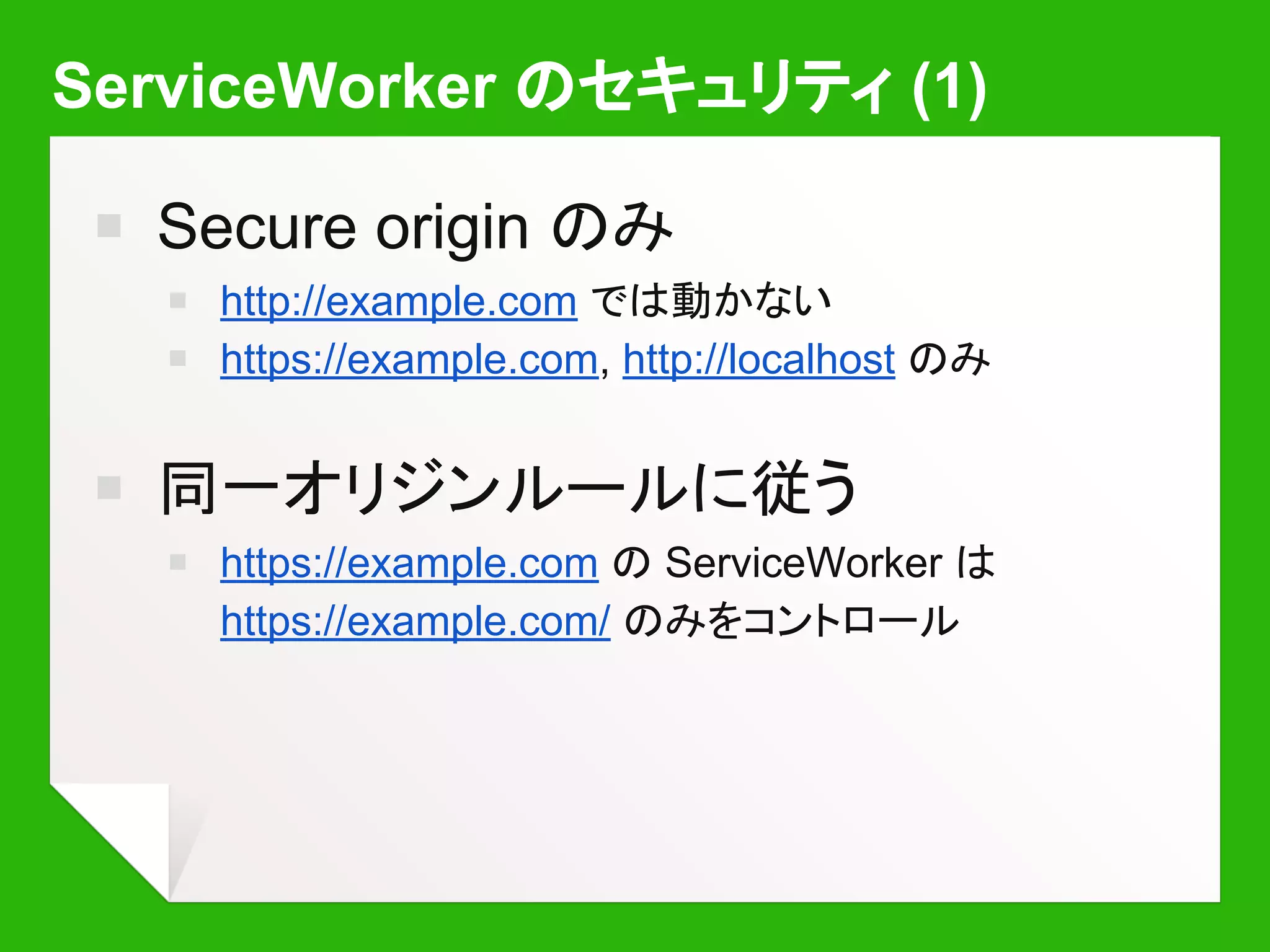
ServiceWorker のセキュリティ (1) ■
Secure origin のみ ■ http://example.com では動かない ■ https://example.com, http://localhost のみ ■ 同一オリジンルールに従う ■ https://example.com の ServiceWorker は https://example.com/ のみをコントロール
42.
ServiceWorker のセキュリティ (2) ■
コントロールできるのはスクリプトの置か れているパス以下のみ ■ https://example.com/foo/sw.js は https://example.com/bar/ をコントロールできない ■ ただし、Service-Worker-Allowed: ヘッダ でサーバ側で変更できる (M42から) ■ Service-Worker-Allowed: ‘/allowed- path’
43.
ServiceWorker のセキュリティ (3) ■
ServiceWorker スクリプトは javascript MIME type でサーブされる必要がある ■ text/plain などでサーブされてるスクリプトは ServiceWorker として登録できない ■ ServiceWorker のリクエストには Service- Worker: script ヘッダがつく ■ サイト側で簡単に disable できる ■ 最初は whitelist されたものだけ許可するのオススメ
44.
ServiceWorker いつから試すべきか?
45.
新しい API だし、 いつから試すべき…? 今です
46.
ServiceWorker を今すぐ試すべき理由 既存サイトに Opt-in
で対応可能 ■ ロード時間の短縮 ■ オフラインへの対応 ■ Push通知対応 ■ … SW対応ブラウザ → UXの向上 SW非対応ブラウザ → そのまま
47.
ServiceWorker を今すぐ試すべき理由 既存サイトに Opt-in
で対応可能 ■ ロード時間の短縮 ■ オフラインへの対応 ■ Push通知対応 ■ … ネイティブ・アプリでいい? ■ いいものもある、もちろん ■ インストールするメリットがあるサイトですか? ■ 誰に、いつまで “Install App” 出し続けますか?
48.
ServiceWorker を今すぐ試すべき理由 既存サイトに Opt-in
で対応可能 ■ ロード時間の短縮 ■ オフラインへの対応 ■ Push通知対応 ■ … むしろ ServiceWorker 化 しない理由がない!
49.
ブラウザの対応状況 Chrome で今すぐ使えます! http://bit.ly/use-sw-today
50.
ブラウザの対応状況 Firefox でも試せます! http://bit.ly/ff-sw-builds
51.
ブラウザの対応状況 Internet Explorer にも実装してもらおう! http://bit.ly/vote-ie-sw
52.
What’s coming next?
53.
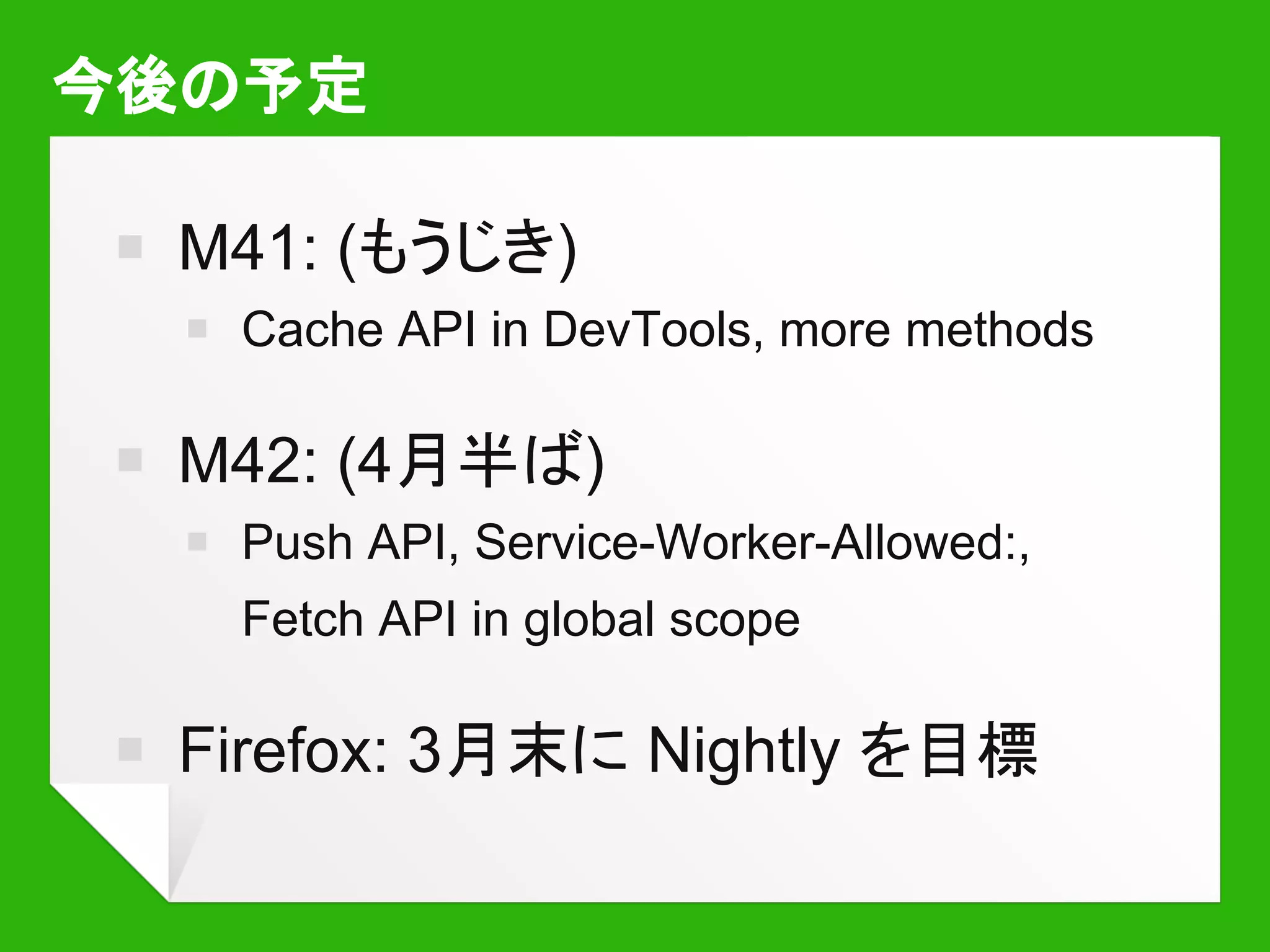
今後の予定 ■ M41: (もうじき) ■
Cache API in DevTools, more methods ■ M42: (4月半ば) ■ Push API, Service-Worker-Allowed:, Fetch API in global scope ■ Firefox: 3月末に Nightly を目標
54.
参考になるページなど ■ Chrome 40
で今すぐServiceWorker を試す ■ HTML5Rocks: ServiceWorkerの紹介 ■ Google I/O 2014 - ServiceWorker でネイティ ブアプリとの差を縮めよう ■ Jake Archibald’s blog: The offline cookbook
Download
![Cache と Fetch API を組み合わせる
Cache
importScripts(‘cache-polyfill.js’);
self.oninstall = function(ev) {
ev.waitUntil(
caches.open(‘v2’).then(function(cache) {
return cache.addAll([‘/’, ‘/cat.png’, ...]);
})); };
self.onactivate = function(ev) {
ev.waitUntil(caches.delete(‘v1’));
};
self.onfetch = function(ev) {
ev.respondWith(
caches.match(ev.request).then(function(res) {
return res || fetch(ev.request);
}); };
‘/’以下をキャッシュして
おき、キャッシュにない
データへのリクエストが
来たらfetch](https://image.slidesharecdn.com/serviceworkermobileweb1-150225013305-conversion-gate01/75/Service-worker-mobile-web-33-2048.jpg)
![ServiceWorker の更新
■ コントロールされているページをロードすると
ブラウザが自動でチェック
■ Cache-control には従うので注意 (ただし24時間以上たってい
たら必ず見に行く)
■ コントロールされてるページがある限り新しいものには置き換え
ない (Reload - Shift+Reload - Reload が有効)
self.oninstall = function(ev) {
ev.waitUntil(
caches.open(‘v2’).then(function(cache) {
return cache.addAll([‘...]);
}));
};
self.onactivate = function(ev) {
ev.waitUntil(caches.delete(‘v1’));
};
キャッシュの中身も
忘れずに更新する](https://image.slidesharecdn.com/serviceworkermobileweb1-150225013305-conversion-gate01/75/Service-worker-mobile-web-36-2048.jpg)