1. Lateral Control of a Vehicle Platoon
Sam Mitchell, Kyle Hymas
Electrical, Mechanical Engineering, Utah State University
MOTIVATION
Nationally,freeway congestion costs the
economy over $1 trillion annually. Automated
vehicles are part of a solution that will prevent
future costly and time-wasting traffic jams.The
standard lanekeeping control algorithms aren't
effective in many adverse environments. Vehicle
following is a part of the solution to this
complex problem.
This project demonstrates a vehicle following
system that will be used by the SATS Group at
USU.
The controller drew heavily from Ferrin’s “Controls
of a tether-based robotic convoy” (2007).
The system utilizes a separable lateral (steering) and
longitudinal (speed) control method.
Pure pursuit control (Figure 1)
𝑘 =
2𝑒 𝑦
𝑑2 =
2 sin 𝜃
𝑑
Longitudinal control
𝑣 =
𝑘
𝑚
𝑑 𝑛 − 𝑑 𝑑𝑒𝑠 +
𝑐
𝑚
( 𝑣 𝑛+1 − 𝑣 𝑛)
Differential contol
𝑣 𝑅 = 𝑣 1 + 𝑘 ∗
𝐿
2
𝑣 𝐿 = 𝑣 1 − 𝑘 ∗
𝐿
2
Many thanks to my advisors, Dr. Ryan Gerdes, Dr. Rajnikant Sharma,
Dr. Don Cripps, and Jolynne Berrett.
The members of the SATS Group have been amazing, offering insight
and many hours of vehicle assembly. Daniel Dunn,Ali Al-Hashimi,
Soudeh Dadras, and Imran Sajjad.
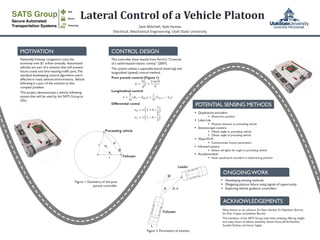
Follower
Preceeding vehicle
dr
r
ex
ey
Figure 1, Geometry of the pure
pursuit controller
Quadrature encoders
Determine position
Lidar-Lite
Measure distance to preceding vehicle
Stereoscopic camera
Obtain angle to preceding vehicle
Obtain angle of preceding vehicle
XbeeWi-Fi
Communicate known parameters
Infrared camera
Detect tail lights for angle to preceding vehicle
Accelerometer
Assist quadrature encoders in determining position
Follower
Leader
Figure 2. Parameters of interest.
Developing sensing methods
Mitigating platoon failure using signals of opportunity
Exploring vehicle guidance controllers
ACKNOWLEDGEMENTS
ONGOINGWORK
POTENTIAL SENSING METHODS
CONTROL DESIGN
L