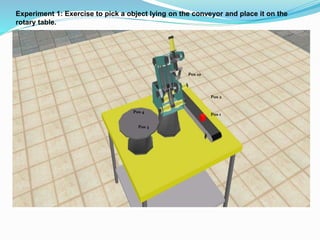
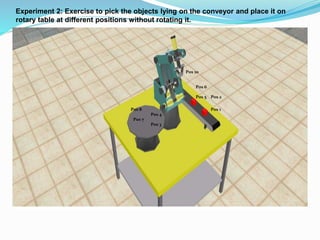
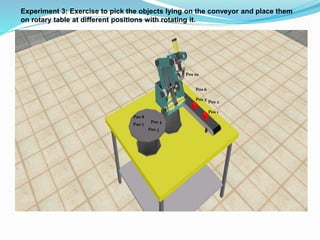
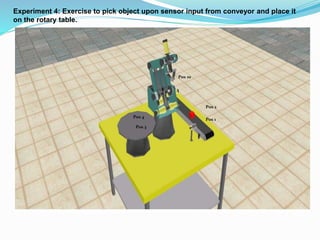
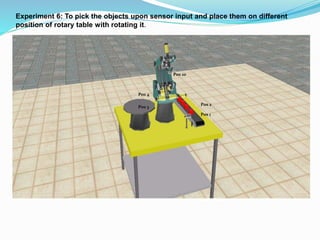
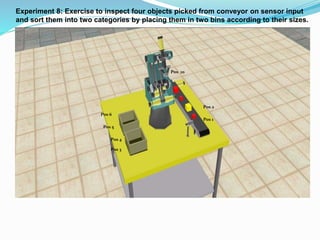
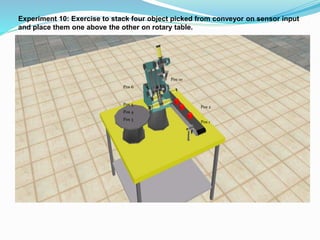
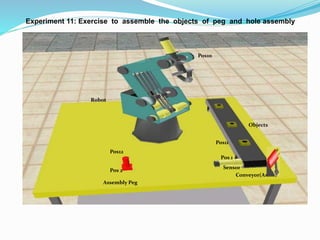
The document outlines 10 experiments conducted in a robotics lab at B.L.D.E.A’S SSM Polytechnic in Vijayapur, India. The experiments involve a robot using sensors to pick objects from a conveyor belt and place them in various positions on a rotary table, including stacking objects. The robot is also tested on sorting objects by size and completing a peg-and-hole assembly task.