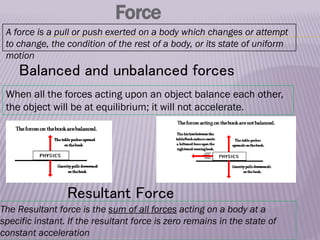
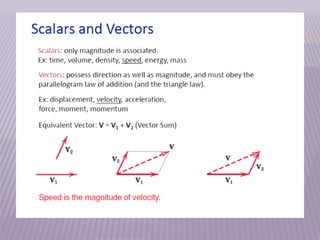
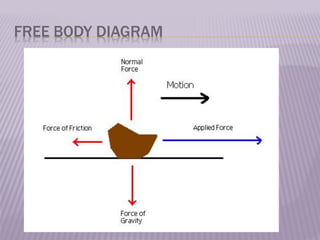
The document provides an overview of classical mechanics, discussing its limitations in the realms of quantum mechanics and relativistic speeds while emphasizing its applicability for larger systems and ordinary velocities. Key concepts such as force, mass, weight, friction, energy, and rotational motion are defined, along with the laws of motion and their implications. The document also addresses the distinction between conservative and non-conservative forces, and includes fundamental principles like the conservation of mechanical energy.