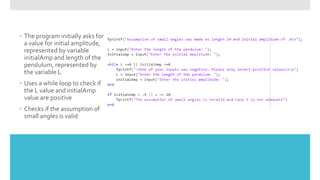
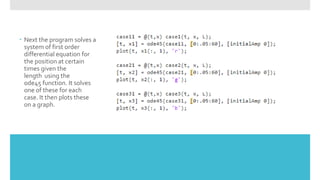
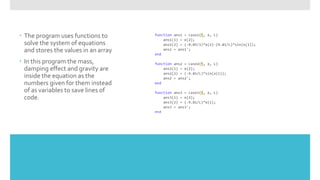
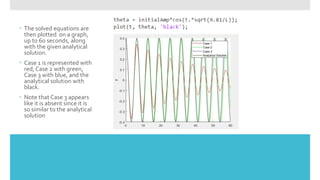
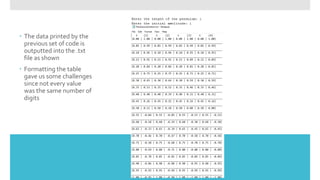
This document summarizes a program that models the motion of a pendulum. The program takes initial amplitude and length as inputs, uses differential equations to calculate the pendulum's position over time for different cases, and plots the solutions on a graph. It also exports the data to a text file in table format.