Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
matsunoh
PPTX, PDF
1,226 views
画像から深度推定 on HoloLens
Tokyo HoloLens ミートアップ vol.14 LT
Technology
◦
Read more
3
Save
Share
Embed
Embed presentation
Download
Downloaded 11 times
1
/ 11
2
/ 11
3
/ 11
4
/ 11
5
/ 11
6
/ 11
7
/ 11
8
/ 11
9
/ 11
10
/ 11
11
/ 11
More Related Content
PDF
HoloLensでSharingする方法(Bluetooth編)@TokyoHoloLensMeetup vol.6
by
akihiro yamamoto
PDF
HoloLensでImage-Based Lightingを試してみた話
by
Soichiro Sugimoto
PPTX
やんちゃでかしこいあいぼうをHoloLensで操作してみた
by
Kohsuke Nakagawa
PPTX
HoloLensの魅力とビジネス利用
by
Yusuke Furuta
PDF
HoloLens x IoT 試すときによくやる実装
by
Seigo Tanaka
PPTX
本場レドモンド仕込み!Holo lens開発ノウハウ20連発!
by
Shingo Mori
PPTX
自分で作ったHoloLensアプリを他業種の人に見せてみた
by
Shinnosuke Oka
PPTX
HoloLens x Graphics 入門
by
hecomi
HoloLensでSharingする方法(Bluetooth編)@TokyoHoloLensMeetup vol.6
by
akihiro yamamoto
HoloLensでImage-Based Lightingを試してみた話
by
Soichiro Sugimoto
やんちゃでかしこいあいぼうをHoloLensで操作してみた
by
Kohsuke Nakagawa
HoloLensの魅力とビジネス利用
by
Yusuke Furuta
HoloLens x IoT 試すときによくやる実装
by
Seigo Tanaka
本場レドモンド仕込み!Holo lens開発ノウハウ20連発!
by
Shingo Mori
自分で作ったHoloLensアプリを他業種の人に見せてみた
by
Shinnosuke Oka
HoloLens x Graphics 入門
by
hecomi
What's hot
PPTX
20180414 札幌 Hololens meetup vol.1
by
Hiromu Kato
PDF
HoloLens x iPad
by
hecomi
PPTX
20171030_HoloLens読書会vol.1発表資料
by
Shingo Mori
PPTX
Holo lensを普段使いするとしたら
by
Naoaki Yamaji
PDF
なにかが起きるで考えるWEB、そしてIoT・Mixed Reality
by
Seigo Tanaka
PDF
HoloLensとBluetooth SensorTagをつなげた話
by
Seigo Tanaka
PPTX
HoloLens RS4
by
Shinya Tachihara
PDF
Osaka holo lens hackathon 2021 HoloMoto
by
AsahiSakamoto
PDF
Unityで始めるHoloLensアプリ開発
by
kazuya noshiro
PDF
Xrmeating2021
by
AsahiSakamoto
PDF
HoloLensでIoT制御してみて感じる未来
by
Seigo Tanaka
PDF
ひとまずHoloLensと自分の周辺技術(WEB・IoT)と混ぜた話
by
Seigo Tanaka
PPTX
広告目線から見たHoloLens - 坪倉輝明
by
Teruaki Tsubokura
PPTX
20170913 nagoya holo_lens_meetup
by
康幸 三浦
PDF
Adobe XDをHoloLensで表示させて考えるいろいろな可能性
by
Seigo Tanaka
PPTX
画像処理は怖くない-OpenCVのすすめ-
by
JackMasaki
PPTX
HololensとUnity
by
JackMasaki
PDF
ハマる!HoloLensアプリ開発
by
Tatsuya Sakai
PPTX
Holoニュースとか(2020 02)
by
Naoaki Yamaji
PPTX
20181006 tokyo vol10_naka
by
NakaJota
20180414 札幌 Hololens meetup vol.1
by
Hiromu Kato
HoloLens x iPad
by
hecomi
20171030_HoloLens読書会vol.1発表資料
by
Shingo Mori
Holo lensを普段使いするとしたら
by
Naoaki Yamaji
なにかが起きるで考えるWEB、そしてIoT・Mixed Reality
by
Seigo Tanaka
HoloLensとBluetooth SensorTagをつなげた話
by
Seigo Tanaka
HoloLens RS4
by
Shinya Tachihara
Osaka holo lens hackathon 2021 HoloMoto
by
AsahiSakamoto
Unityで始めるHoloLensアプリ開発
by
kazuya noshiro
Xrmeating2021
by
AsahiSakamoto
HoloLensでIoT制御してみて感じる未来
by
Seigo Tanaka
ひとまずHoloLensと自分の周辺技術(WEB・IoT)と混ぜた話
by
Seigo Tanaka
広告目線から見たHoloLens - 坪倉輝明
by
Teruaki Tsubokura
20170913 nagoya holo_lens_meetup
by
康幸 三浦
Adobe XDをHoloLensで表示させて考えるいろいろな可能性
by
Seigo Tanaka
画像処理は怖くない-OpenCVのすすめ-
by
JackMasaki
HololensとUnity
by
JackMasaki
ハマる!HoloLensアプリ開発
by
Tatsuya Sakai
Holoニュースとか(2020 02)
by
Naoaki Yamaji
20181006 tokyo vol10_naka
by
NakaJota
Similar to 画像から深度推定 on HoloLens
PDF
HoloLens で OpenCV をどう使うか レーザーポインター 認識で試してみた
by
Franz Weitl
PDF
HoloLens で レーザーポインター認識で試してみた
by
abistAIsolution
PDF
Research modeで取得した深度(Depth)データを可視化する
by
Soichiro Sugimoto
PDF
FastDepth: Fast Monocular Depth Estimation on Embedded Systems
by
harmonylab
PDF
ディープラーニング徹底活用 -画像認識編-
by
Hideki
PPTX
SfM Learner系単眼深度推定手法について
by
Ryutaro Yamauchi
PDF
HoloLens RS4でWindowsML入門+Research mode実装
by
Akihiro Ueyama
PPTX
Depth Estimation論文紹介
by
Keio Robotics Association
PDF
文献紹介:CutDepth: Edge-aware Data Augmentation in Depth Estimation
by
Toru Tamaki
PPTX
HoloLensでONNXを使って推論(Custom Vision - Object Detection編)
by
Takahiro Miyaura
PDF
Azureを活用したHoloLensアプリ開発
by
Satoshi Fujimoto
PPTX
[DL輪読会]PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metr...
by
Deep Learning JP
PDF
KinectでAR空間に入り込もう
by
Takashi Yoshinaga
PPTX
Optim インターンシップ 機械学習による画像の領域分割
by
optim_internship
PDF
【DL輪読会】Monocular real time volumetric performance capture
by
Deep Learning JP
PDF
論文紹介:DF-Net: Unsupervised Joint Learning of Depth and Flow using Cross-Networ...
by
matsunoh
PDF
Microsoft Holographicってなに? 来年、Windows 10に来るらしいぜ?
by
Akira Hatsune
PPT
20180929 sfm learner&vid2_depth_print
by
KUMIKO Suzuki
PPTX
Eccv2018 report day4
by
Atsushi Hashimoto
PDF
Mastering open cv kinectv1 marker based ar
by
Satoshi Fujimoto
HoloLens で OpenCV をどう使うか レーザーポインター 認識で試してみた
by
Franz Weitl
HoloLens で レーザーポインター認識で試してみた
by
abistAIsolution
Research modeで取得した深度(Depth)データを可視化する
by
Soichiro Sugimoto
FastDepth: Fast Monocular Depth Estimation on Embedded Systems
by
harmonylab
ディープラーニング徹底活用 -画像認識編-
by
Hideki
SfM Learner系単眼深度推定手法について
by
Ryutaro Yamauchi
HoloLens RS4でWindowsML入門+Research mode実装
by
Akihiro Ueyama
Depth Estimation論文紹介
by
Keio Robotics Association
文献紹介:CutDepth: Edge-aware Data Augmentation in Depth Estimation
by
Toru Tamaki
HoloLensでONNXを使って推論(Custom Vision - Object Detection編)
by
Takahiro Miyaura
Azureを活用したHoloLensアプリ開発
by
Satoshi Fujimoto
[DL輪読会]PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metr...
by
Deep Learning JP
KinectでAR空間に入り込もう
by
Takashi Yoshinaga
Optim インターンシップ 機械学習による画像の領域分割
by
optim_internship
【DL輪読会】Monocular real time volumetric performance capture
by
Deep Learning JP
論文紹介:DF-Net: Unsupervised Joint Learning of Depth and Flow using Cross-Networ...
by
matsunoh
Microsoft Holographicってなに? 来年、Windows 10に来るらしいぜ?
by
Akira Hatsune
20180929 sfm learner&vid2_depth_print
by
KUMIKO Suzuki
Eccv2018 report day4
by
Atsushi Hashimoto
Mastering open cv kinectv1 marker based ar
by
Satoshi Fujimoto
画像から深度推定 on HoloLens
1.
画像から深度推定 on HoloLens Tokyo
HoloLens ミートアップ vol.14 @miso_3g @hiro6391
2.
自己紹介 @miso_3g • 自社でHoloLens買ってもらえないので出向先で遊んでる人 @hiro6391 • 仕事でHoloLensデモや深層学習をやったりやらなかったり 2
3.
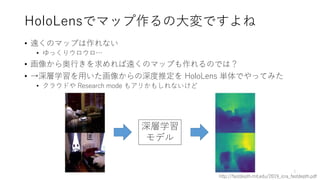
HoloLensでマップ作るの大変ですよね • 遠くのマップは作れない • ゆっくりウロウロ… •
画像から奥行きを求めれば遠くのマップも作れるのでは? • →深層学習を用いた画像からの深度推定を HoloLens 単体でやってみた • クラウドや Research mode もアリかもしれないけど http://fastdepth.mit.edu/2019_icra_fastdepth.pdf 3 深層学習 モデル
4.
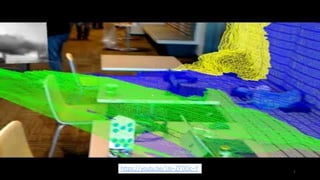
4 https://youtu.be/JJo-ZF0Oc-Y
5.
やったこと 1. モデル選択 2. 学習済モデルを
ONNX 形式に変換 3. Unity + Windows Machine Learning (WinML) で実装 5
6.
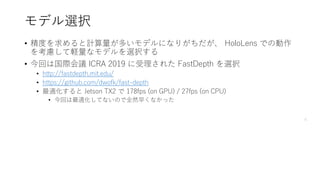
モデル選択 • 精度を求めると計算量が多いモデルになりがちだが、 HoloLens
での動作 を考慮して軽量なモデルを選択する • 今回は国際会議 ICRA 2019 に受理された FastDepth を選択 • http://fastdepth.mit.edu/ • https://github.com/dwofk/fast-depth • 最適化すると Jetson TX2 で 178fps (on GPU) / 27fps (on CPU) • 今回は最適化してないので全然早くなかった 6
7.
ONNX 形式に変換 • FastDepth
は PyTorch (v0.4.1) 実装と学習済モデルが公開されている • PyTorch の ONNX 変換機能を使う。簡単! • https://pytorch.org/docs/stable/onnx.html • しかし、WinMLRunner で正しく動作するか確認すると… • https://github.com/Microsoft/Windows-Machine-Learning/tree/master/Tools/WinMLRunner • 最新の PyTorch 1.0.1 で出力しても… 7 # モデル読み込み(実装依存) checkpoint = torch.load(args.evaluate) model = checkpoint[’model’] # ONNXファイル出力 dummy_input = torch.randn(1, 3, 224, 224) torch.onnx.export(model, dummy_input, ”fastdepth.onnx”) Creating session [FAILED] No suitable kernel definition found for op BatchNormalization Load Model: C:UsersmatsunoDownloadsfastdepth.onnx [FAILED] Input size 2 not in range [min=1, max=1]. 00000165072AB28C
8.
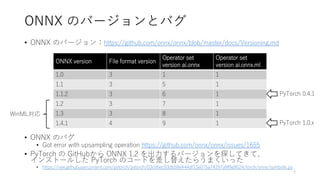
ONNX のバージョンとバグ • ONNX
のバージョン:https://github.com/onnx/onnx/blob/master/docs/Versioning.md • ONNX のバグ • Got error with upsampling operation https://github.com/onnx/onnx/issues/1655 • PyTorch の GitHubから ONNX 1.2 を出力するバージョンを探してきて、 インストールした PyTorch のコードを差し替えたらうまくいった • https://raw.githubusercontent.com/pytorch/pytorch/03c06ec93db58e444df13e075a74297a9f9a9524/torch/onnx/symbolic.py 8 ONNX version File format version Operator set version ai.onnx Operator set version ai.onnx.ml 1.0 3 1 1 1.1 3 5 1 1.1.2 3 6 1 1.2 3 7 1 1.3 3 8 1 1.4.1 4 9 1 WinML対応 PyTorch 0.4.1 PyTorch 1.0.x
9.
WinML で実装 • UnityでWinMLを利用するプロジェクトの作成 •
アキヒロさんのブログが参考になりました • http://akihiro-document.azurewebsites.net/post/hololens_windowsmachinelearningunity/ • 基本的な手順は 1. Unityプロジェクトを作る 2. Unity側で必要な物を実装(GameObject設置、イベント登録など) 3. UWPプロジェクトをビルド 4. Visual StudioでUWPプロジェクトを開いてビルドターゲットのバージョンを1809に変更 5. ONNXファイルをAssetsにDrag & Drop 6. VSが自動でモデルのインタフェースを生成してくれるのでそれを利用して推論部分を実装 7. Unity側をいじったらUWPプロジェクトを再ビルド • ONNXファイルを毎回読み込み直す必要はない 9
10.
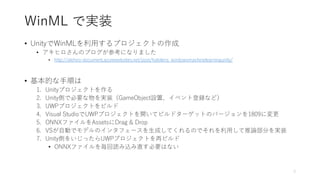
Unityの座標系とモデルの入出力 • Unityとモデルの座標系を変換 • PhotoCaptureで取得したカメラ画像をクロップしてモデルに入力、モデルの推論結果を基に メッシュを作って表示 •
PhotoCapture ⇒ モデル • 原点とY軸の向きが違うので注意 • モデル ⇒ 表示 • PhotoCaptureFrameから変換行列が取得できるので変換は簡単 • 詳細は @rakusan さんのQiita記事などを参考にすると良いです • https://qiita.com/rakusan/items/6af7d35dc7b0222952fa • https://docs.microsoft.com/ja-jp/windows/mixed-reality/locatable-camera 10 [撮影] PhotoCapture [推論] モデル [表示] ワールド座標系 (0, 0) (0, 0) (224, 224)
11.
まとめ/所感 • ONNX 生成から
HoloLens での動作・表示までの流れを紹介した • ONNX のバージョンとバグに注意 • 座標変換に注意 • 推論に2秒くらいかかる • HoloLens 2 でどれだけ早くなるか(≒精度の高いモデルを使えるか) 楽しみです! • ソースコードを公開しました • https://github.com/miso3/HoloFastDepth 11
Editor's Notes
#11
PhotoCaptureで取得したカメラ画像をクロップしてモデルに入力、モデルの推論結果を基にメッシュを作って表示する PhotoCaptureからモデルの座標系への変換は簡単 PhotoCaptureのデータ 原点: 左下 X: 右に+ Y: 上に+ モデルの入力データ 原点: 左上 X: 右に+ Y: 下に+ 推論結果から表示(ワールド座標系)への変換 モデルの
Download

![ONNX 形式に変換
• FastDepth は PyTorch (v0.4.1) 実装と学習済モデルが公開されている
• PyTorch の ONNX 変換機能を使う。簡単!
• https://pytorch.org/docs/stable/onnx.html
• しかし、WinMLRunner で正しく動作するか確認すると…
• https://github.com/Microsoft/Windows-Machine-Learning/tree/master/Tools/WinMLRunner
• 最新の PyTorch 1.0.1 で出力しても…
7
# モデル読み込み(実装依存)
checkpoint = torch.load(args.evaluate)
model = checkpoint[’model’]
# ONNXファイル出力
dummy_input = torch.randn(1, 3, 224, 224)
torch.onnx.export(model, dummy_input, ”fastdepth.onnx”)
Creating session [FAILED]
No suitable kernel definition found for op BatchNormalization
Load Model: C:UsersmatsunoDownloadsfastdepth.onnx [FAILED]
Input size 2 not in range [min=1, max=1].
00000165072AB28C](https://image.slidesharecdn.com/20190413holomeetup14slideshare-190418035738/85/on-HoloLens-7-320.jpg)
![Unityの座標系とモデルの入出力
• Unityとモデルの座標系を変換
• PhotoCaptureで取得したカメラ画像をクロップしてモデルに入力、モデルの推論結果を基に
メッシュを作って表示
• PhotoCapture ⇒ モデル
• 原点とY軸の向きが違うので注意
• モデル ⇒ 表示
• PhotoCaptureFrameから変換行列が取得できるので変換は簡単
• 詳細は @rakusan さんのQiita記事などを参考にすると良いです
• https://qiita.com/rakusan/items/6af7d35dc7b0222952fa
• https://docs.microsoft.com/ja-jp/windows/mixed-reality/locatable-camera 10
[撮影]
PhotoCapture
[推論]
モデル
[表示]
ワールド座標系
(0, 0)
(0, 0)
(224, 224)](https://image.slidesharecdn.com/20190413holomeetup14slideshare-190418035738/85/on-HoloLens-10-320.jpg)







































![[DL輪読会]PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metr...](https://cdn.slidesharecdn.com/ss_thumbnails/181214dlpointnet-181214053349-thumbnail.jpg?width=640&height=640&fit=bounds)







