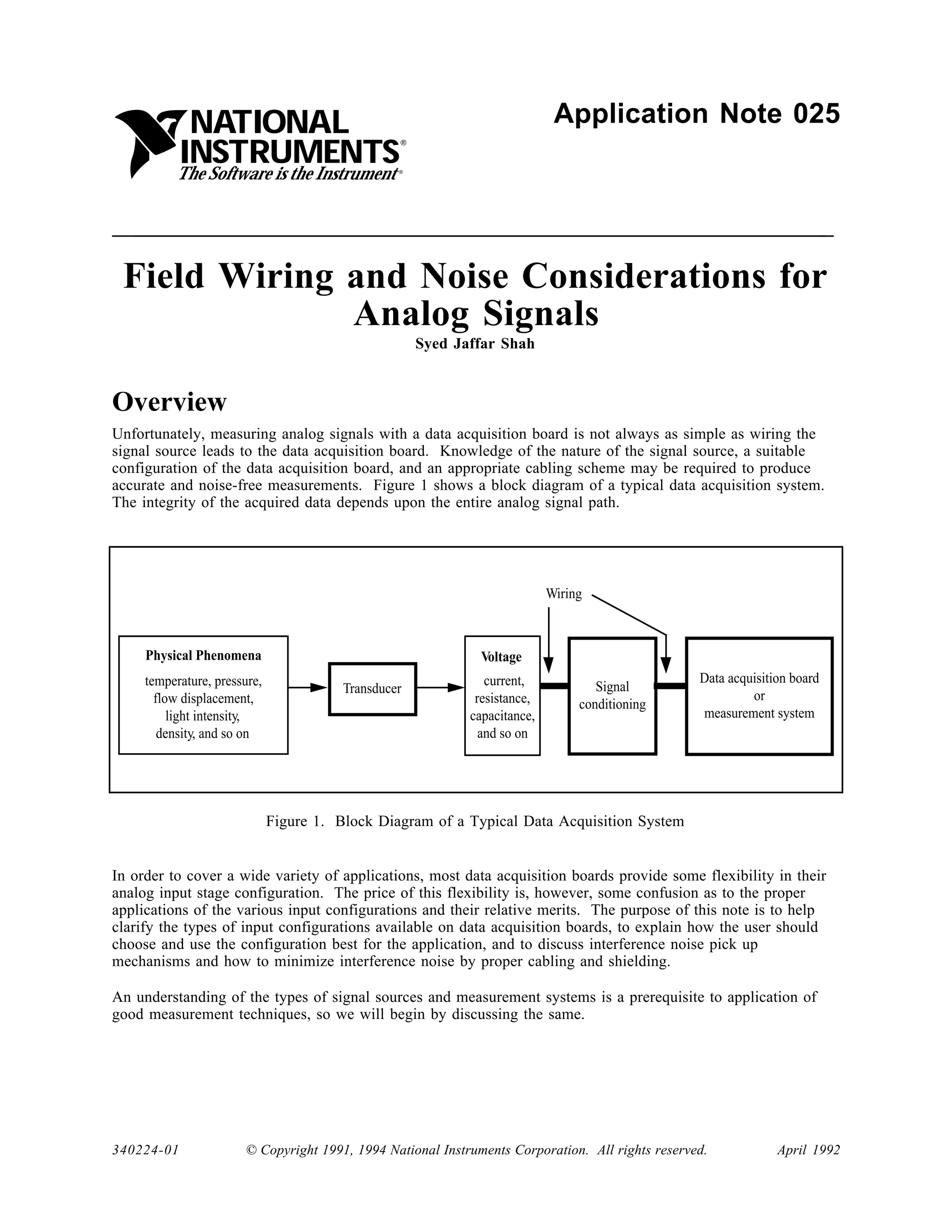
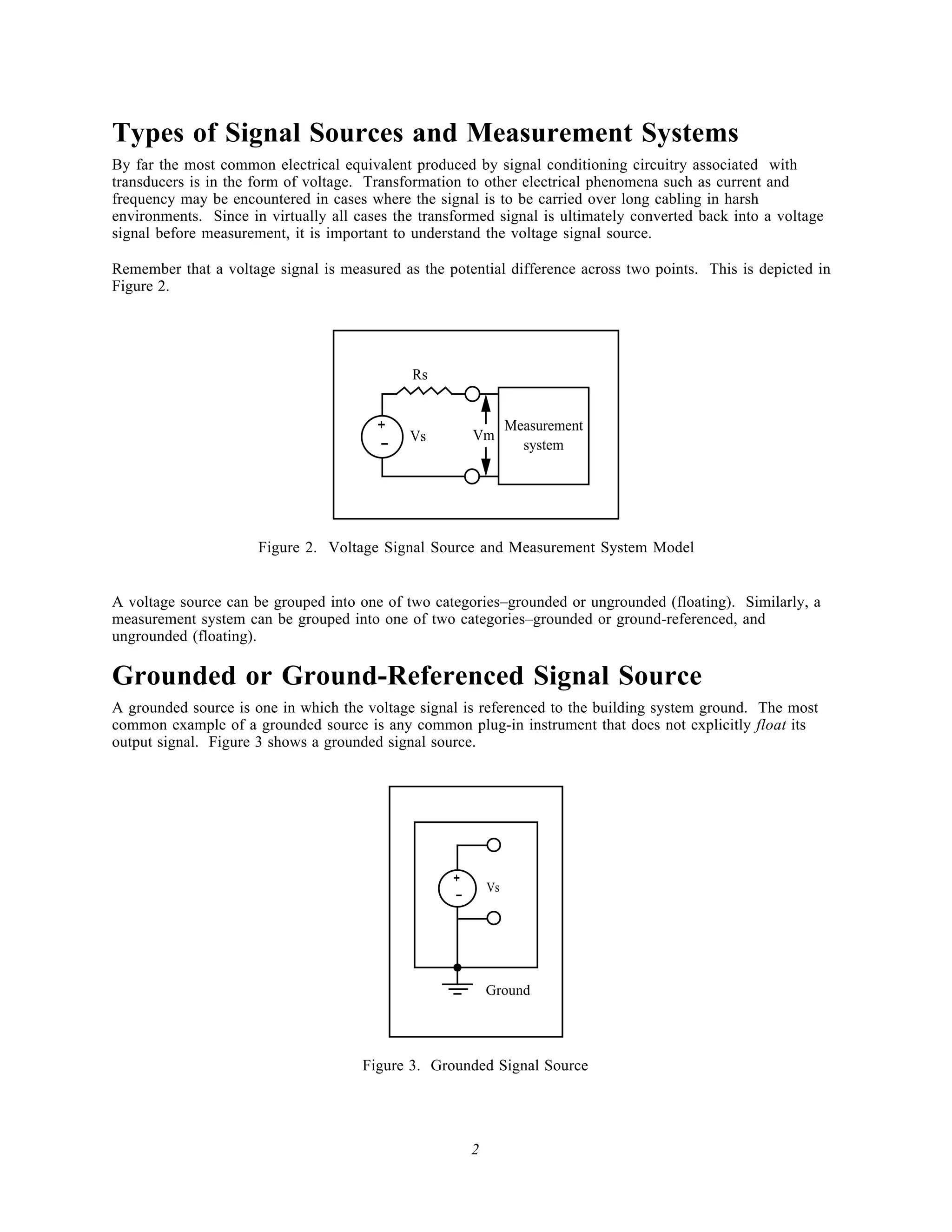
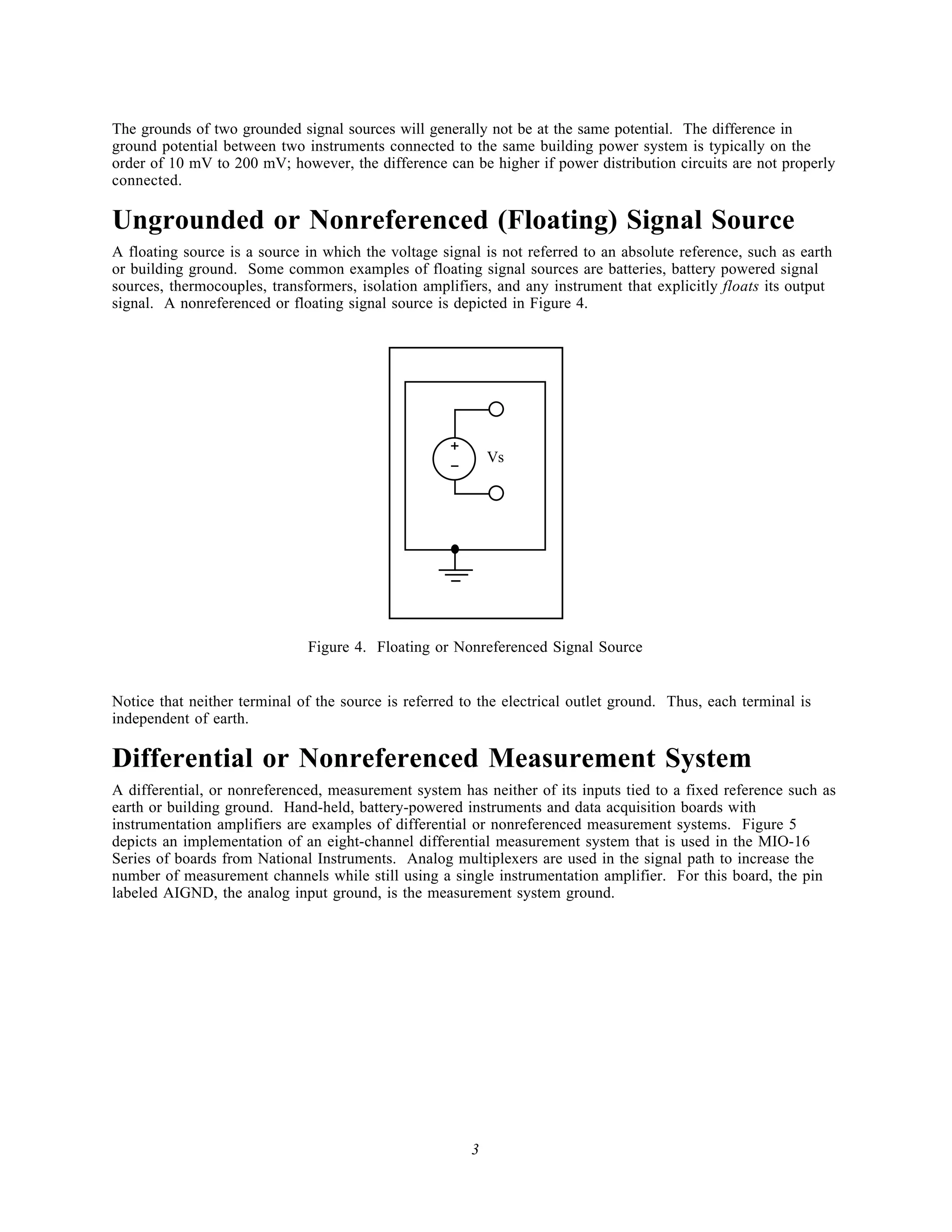
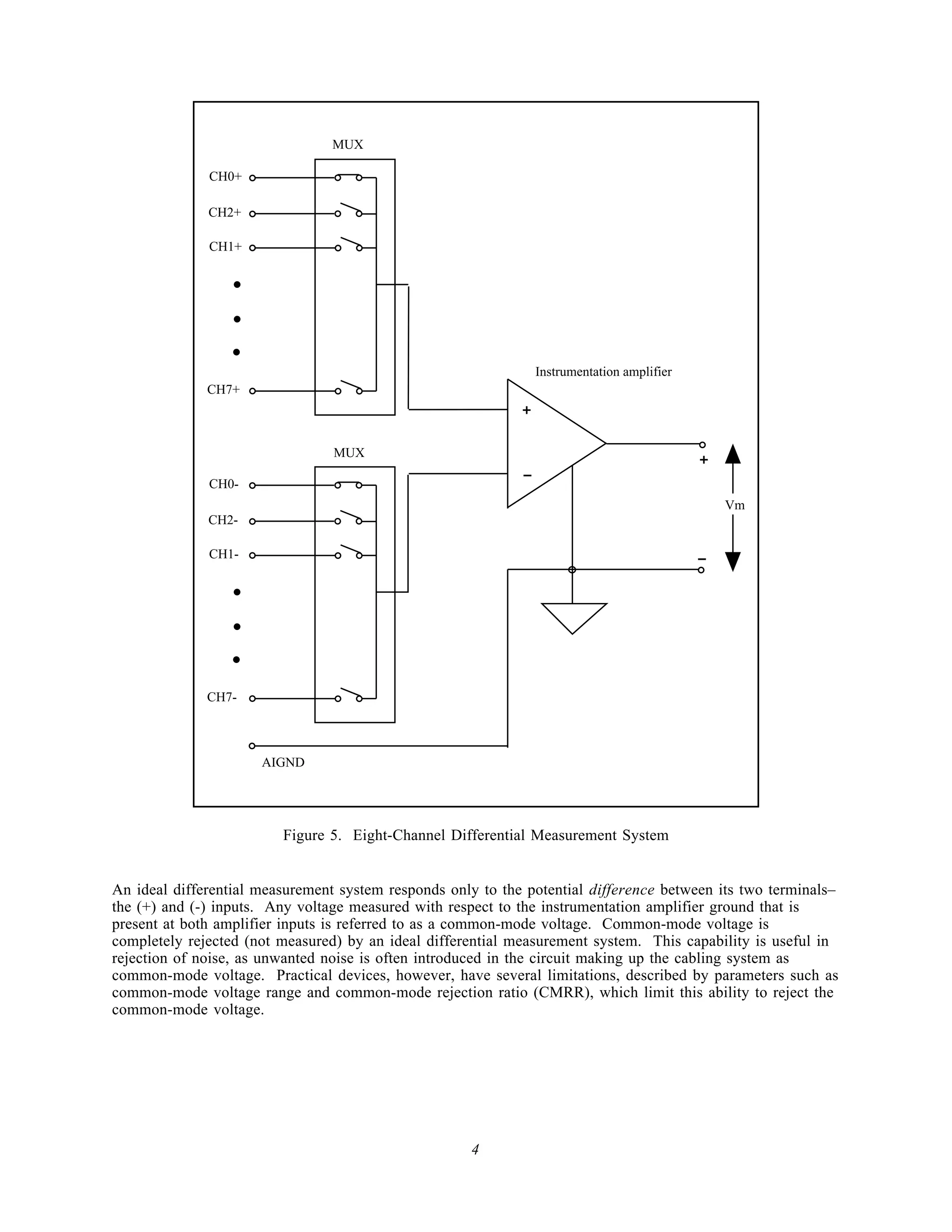
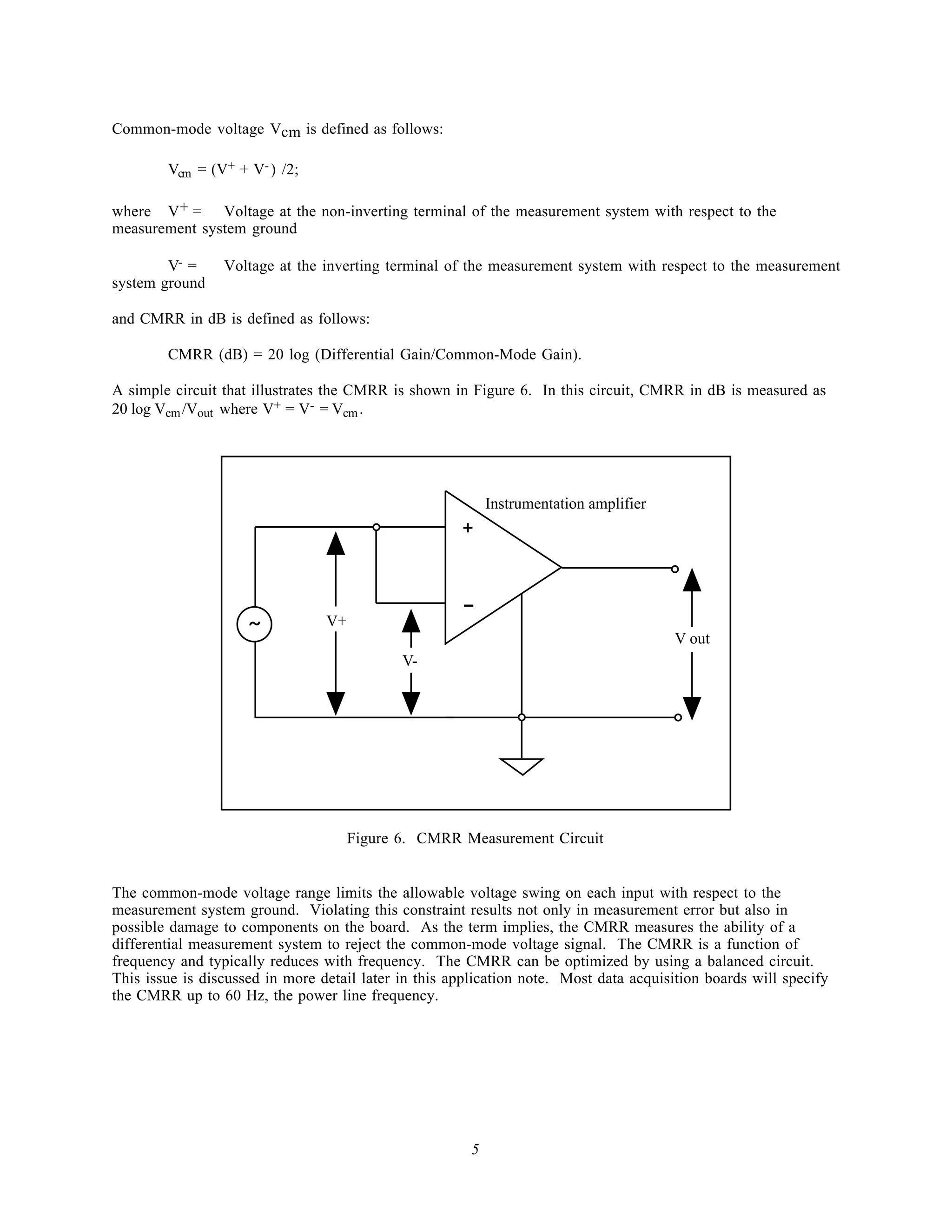
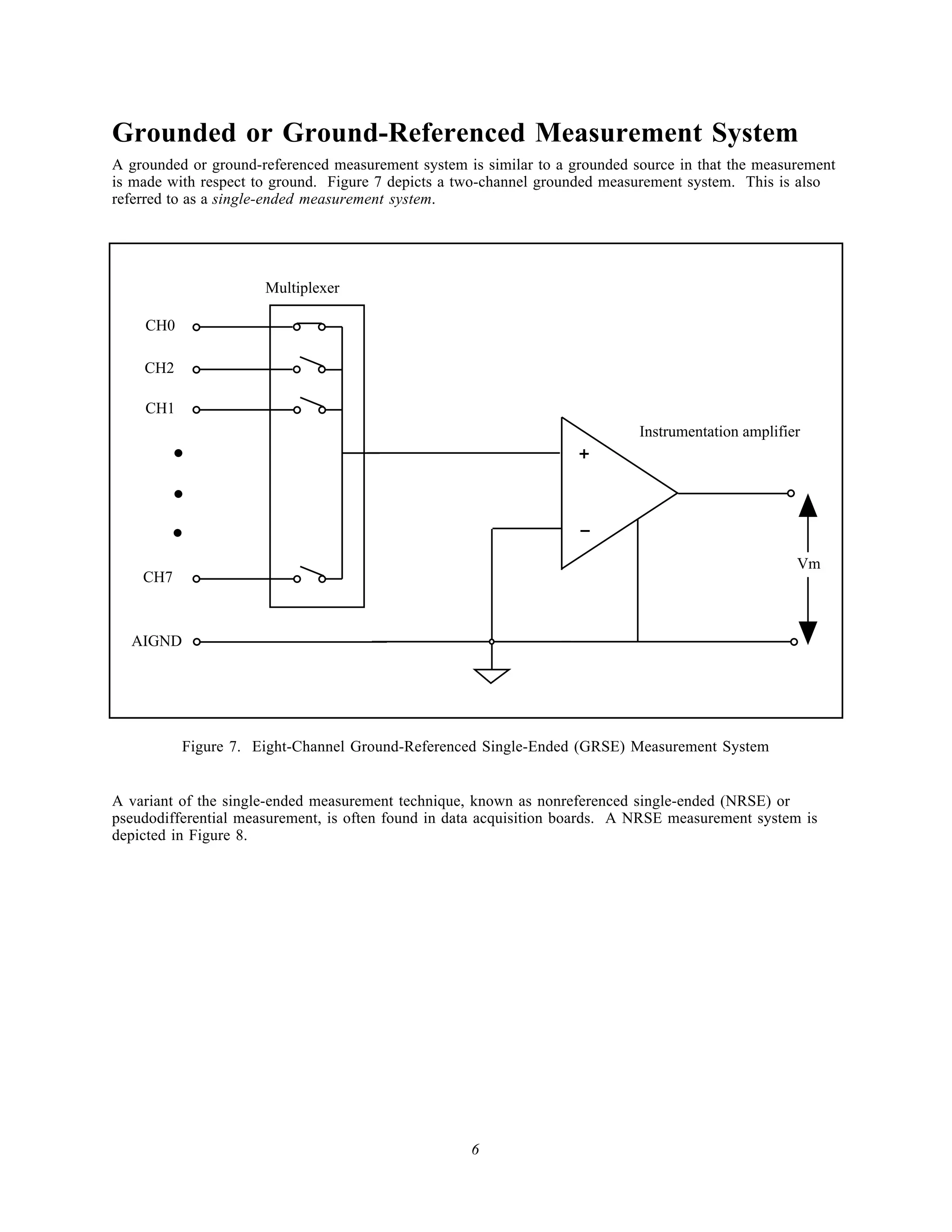
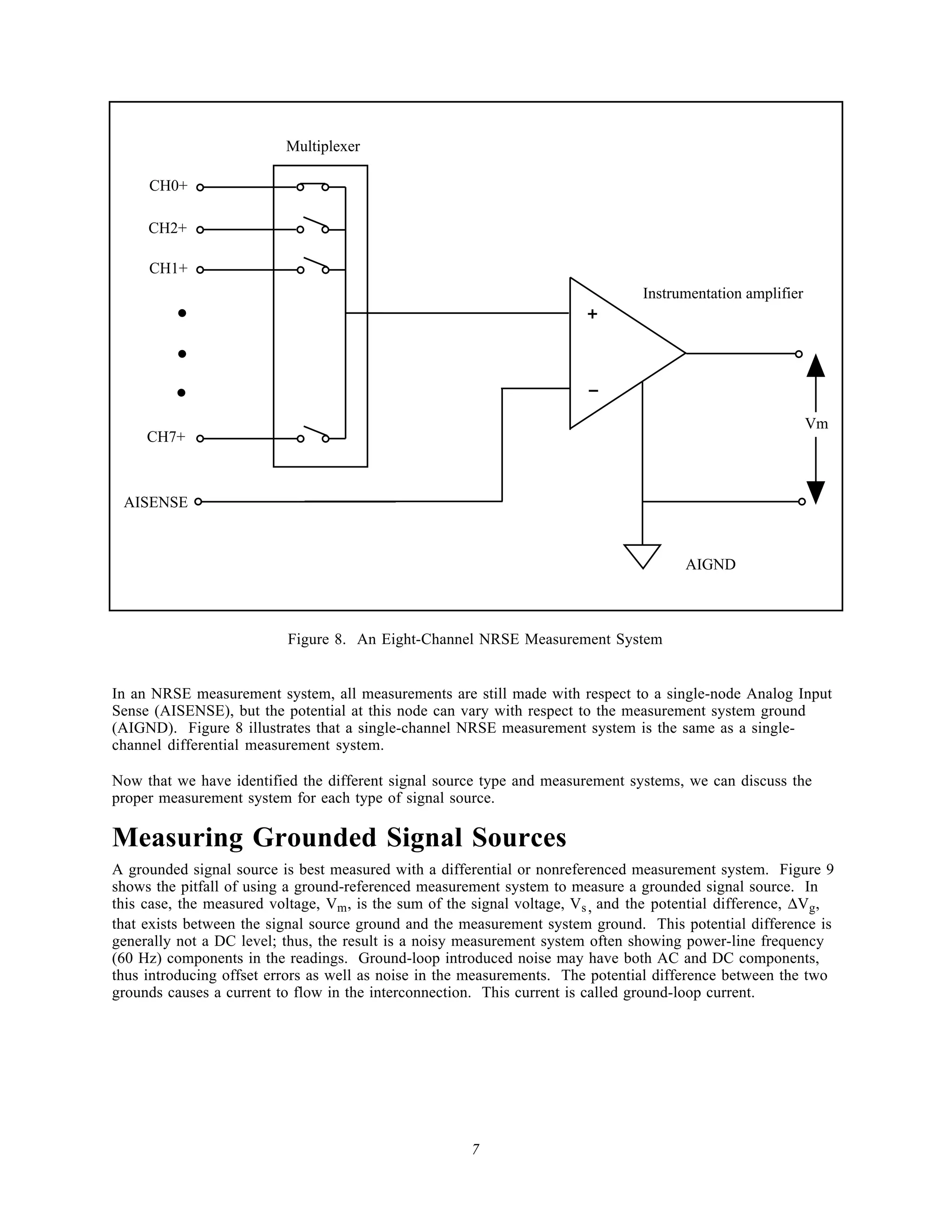
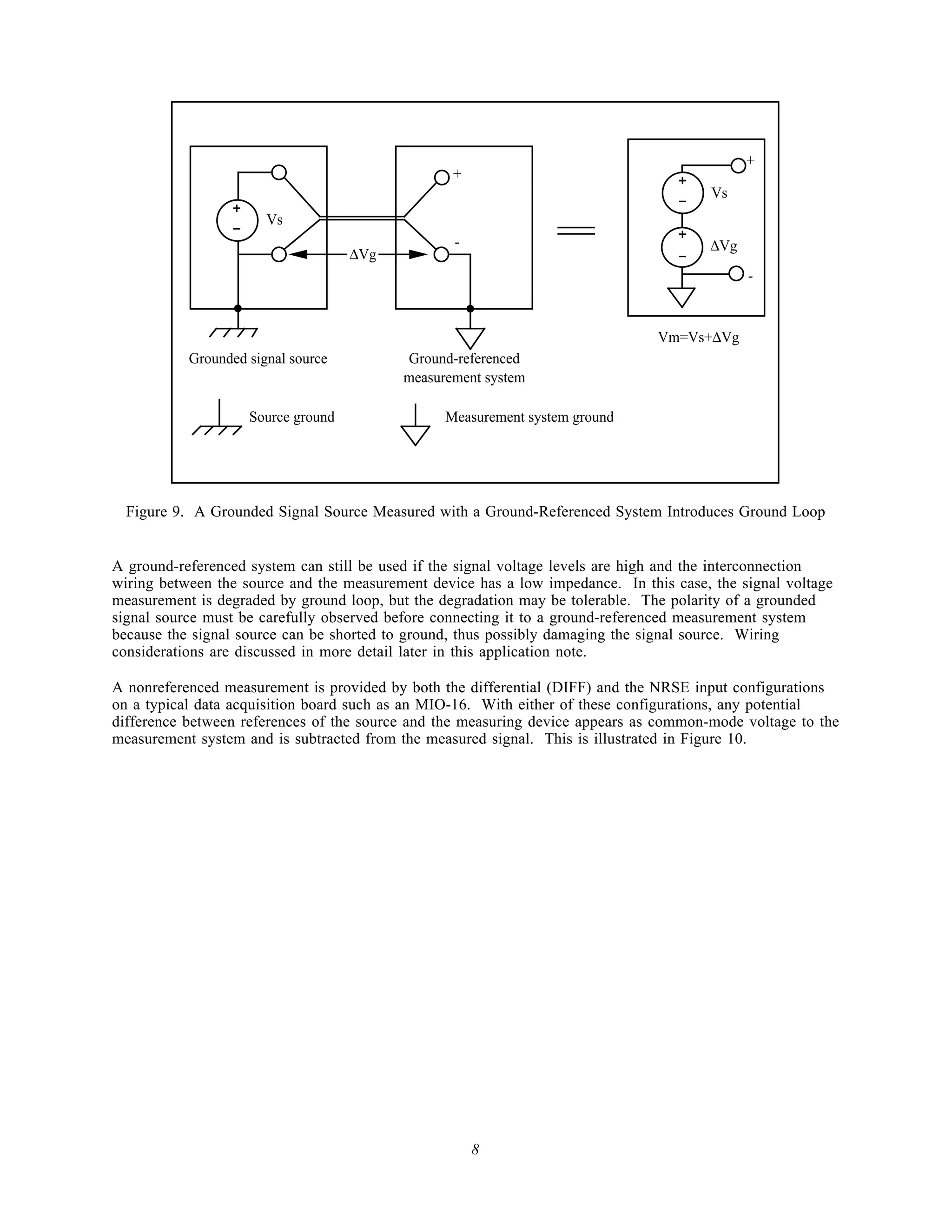
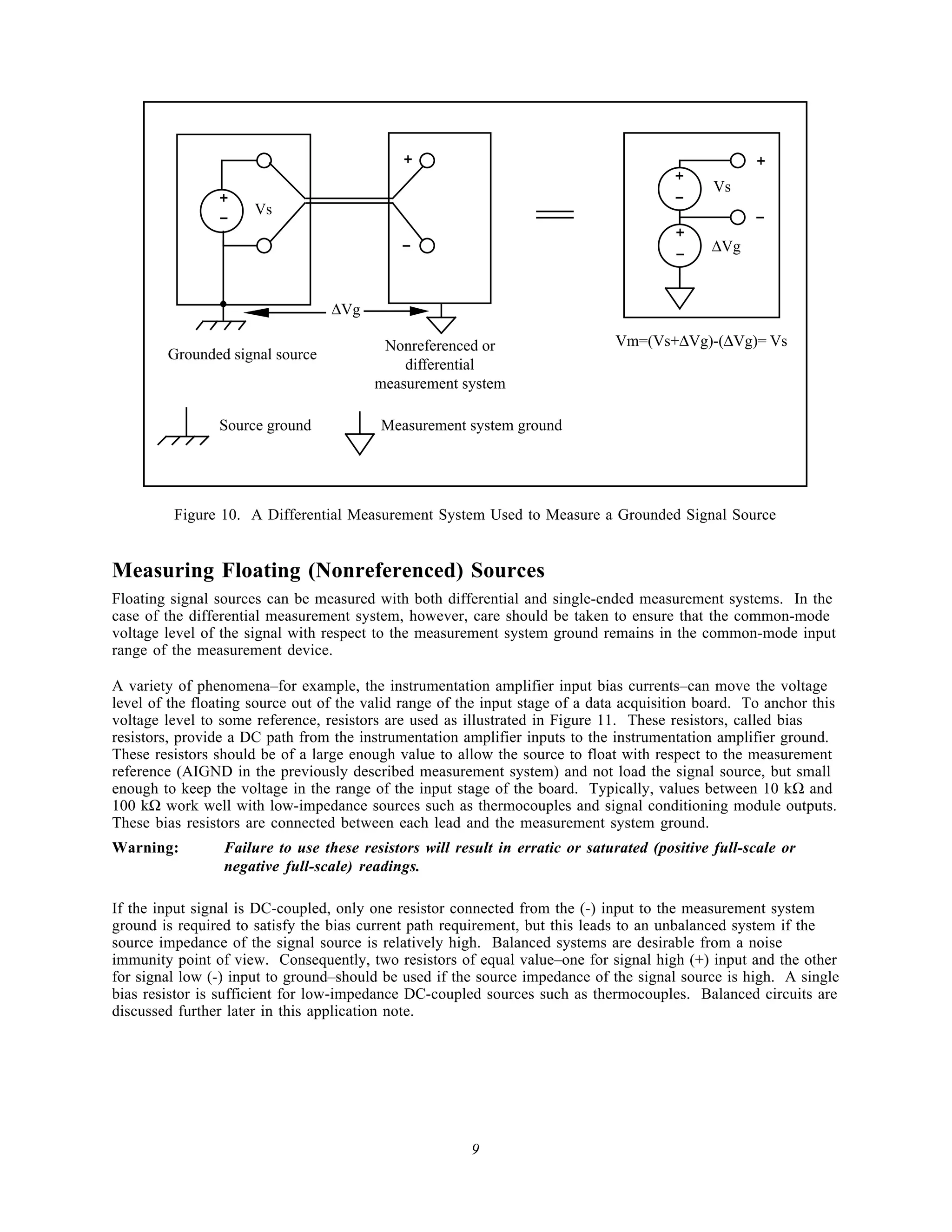
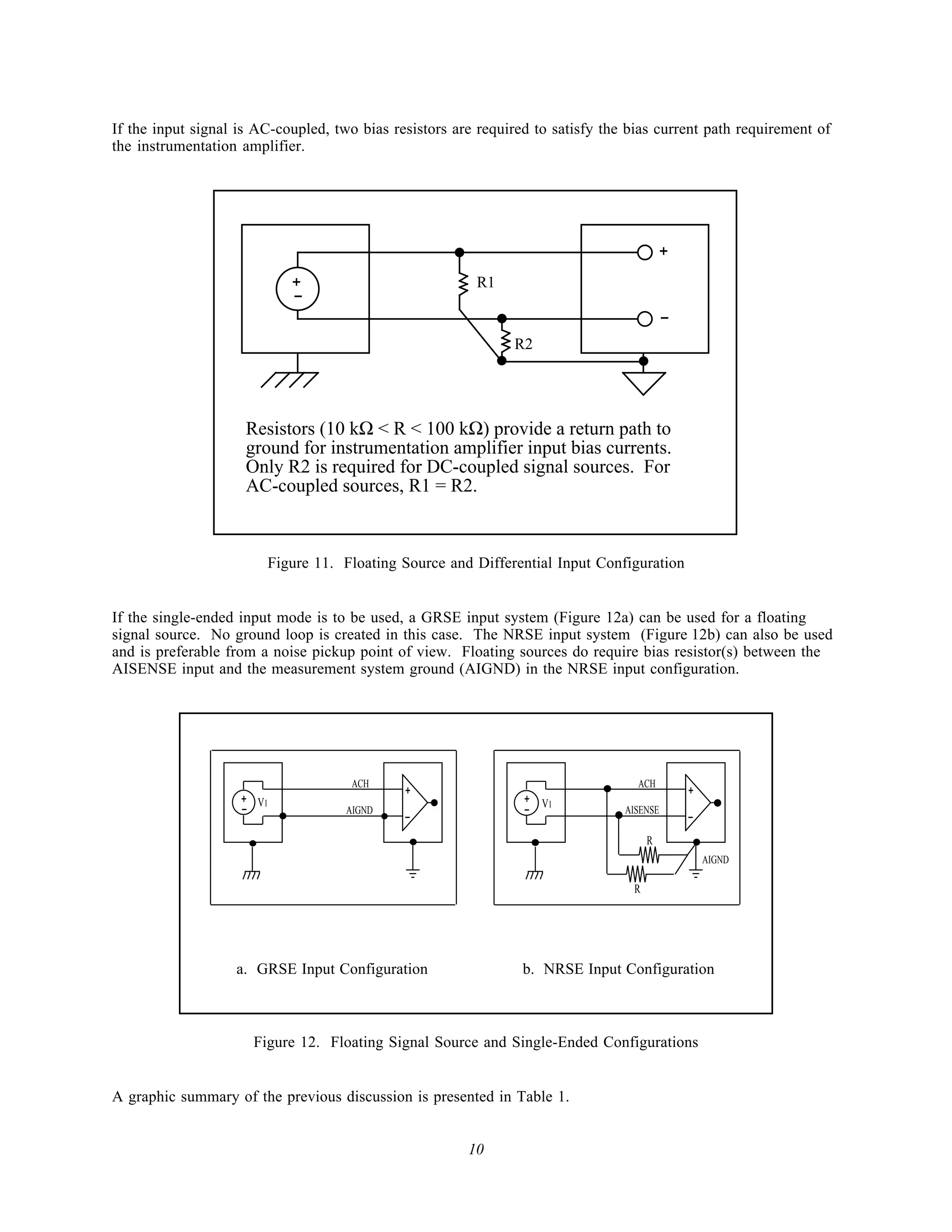
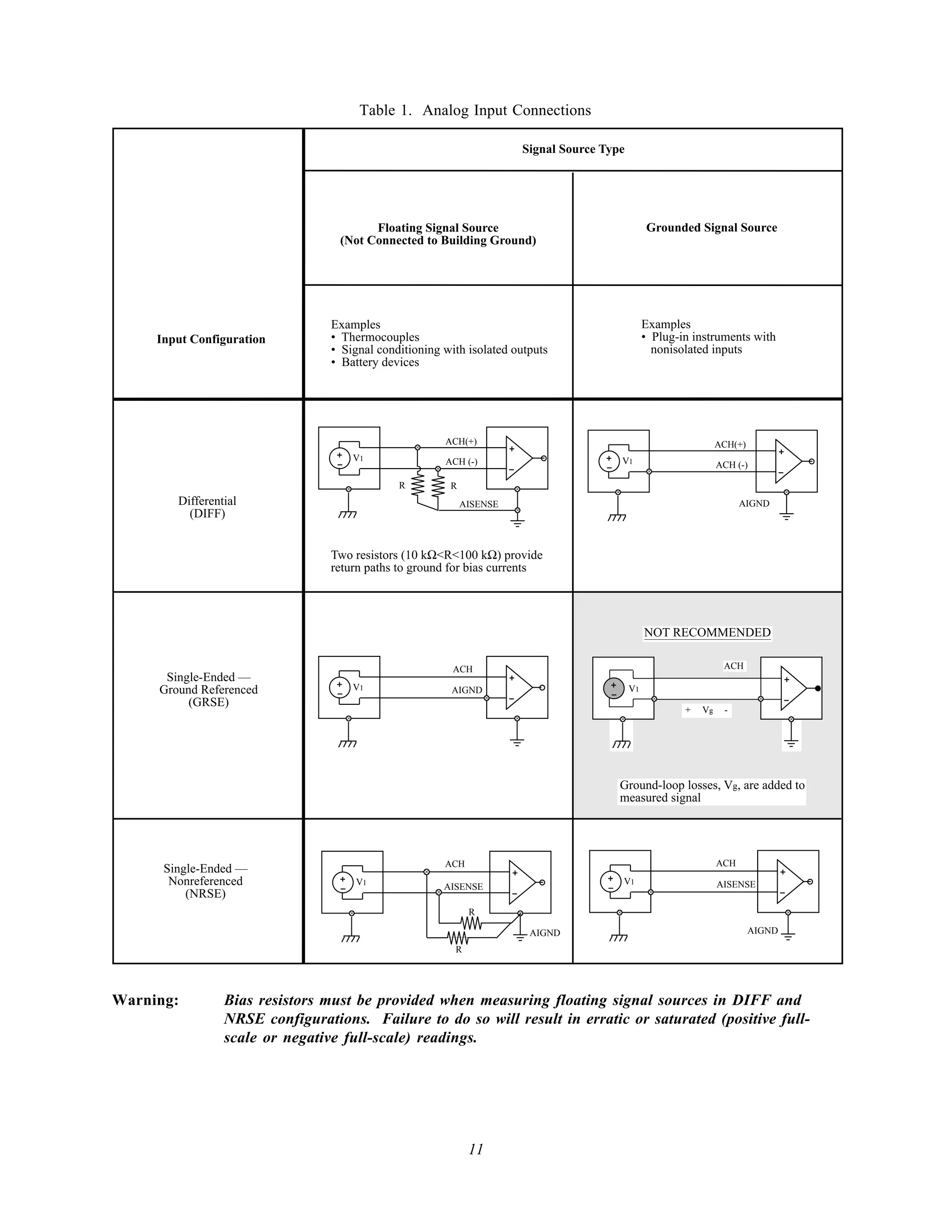
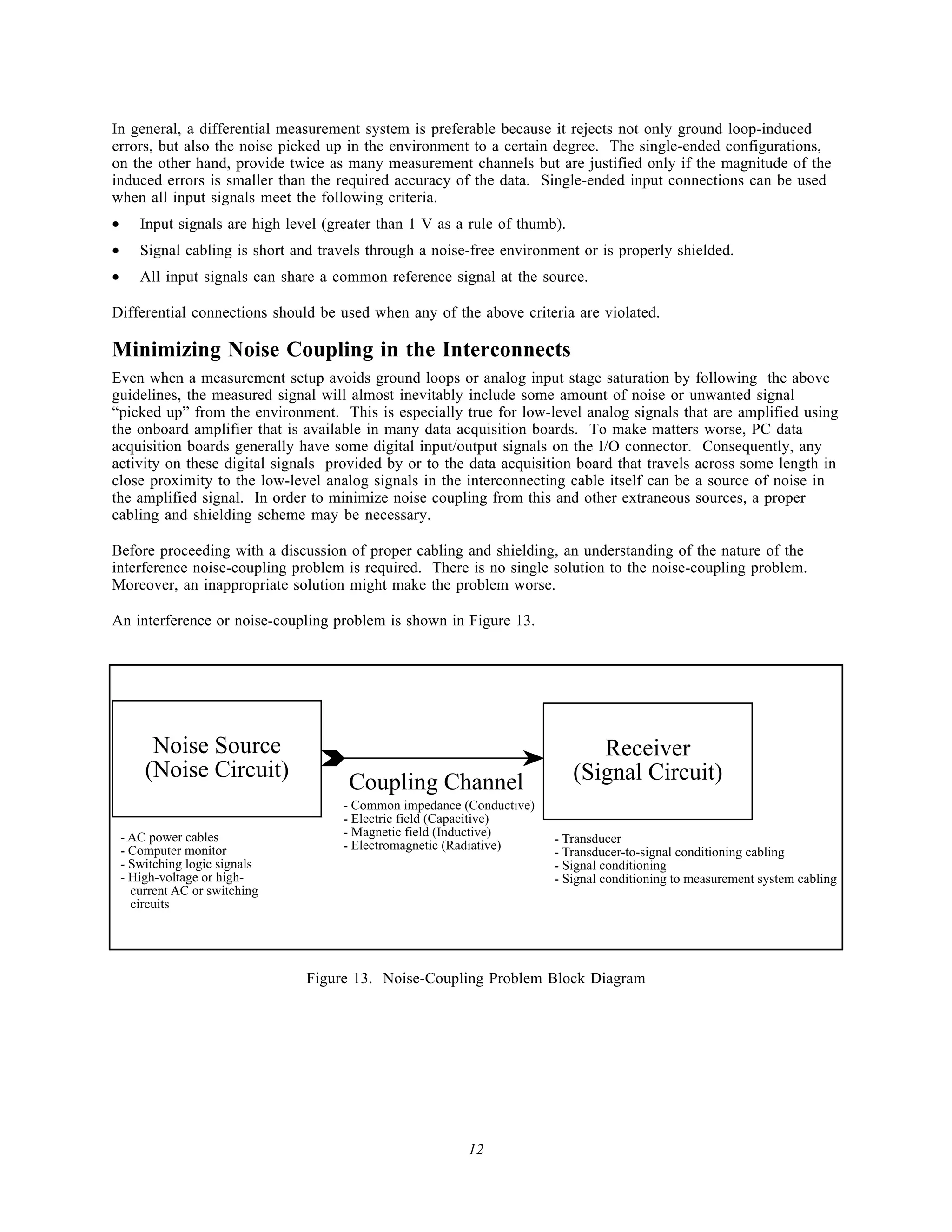
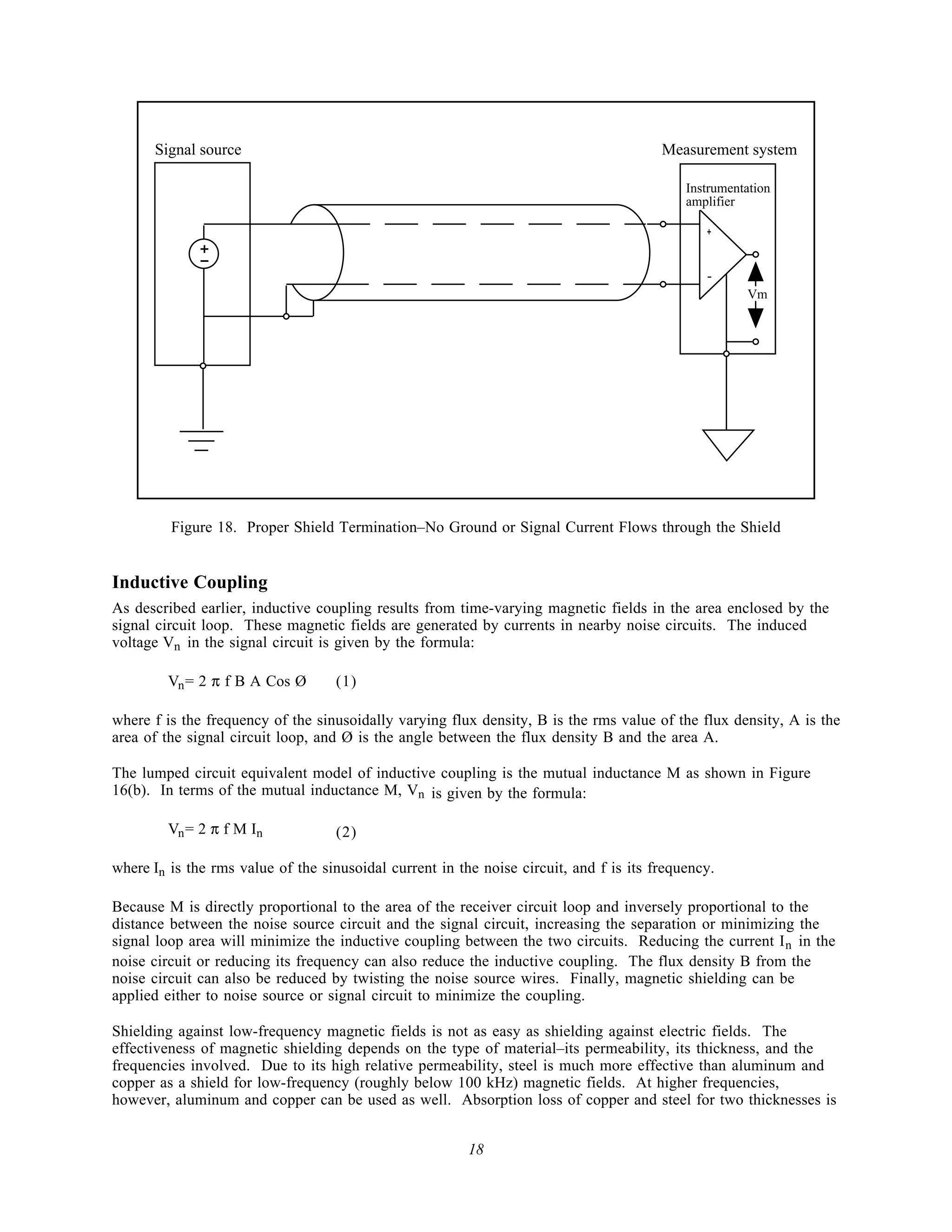
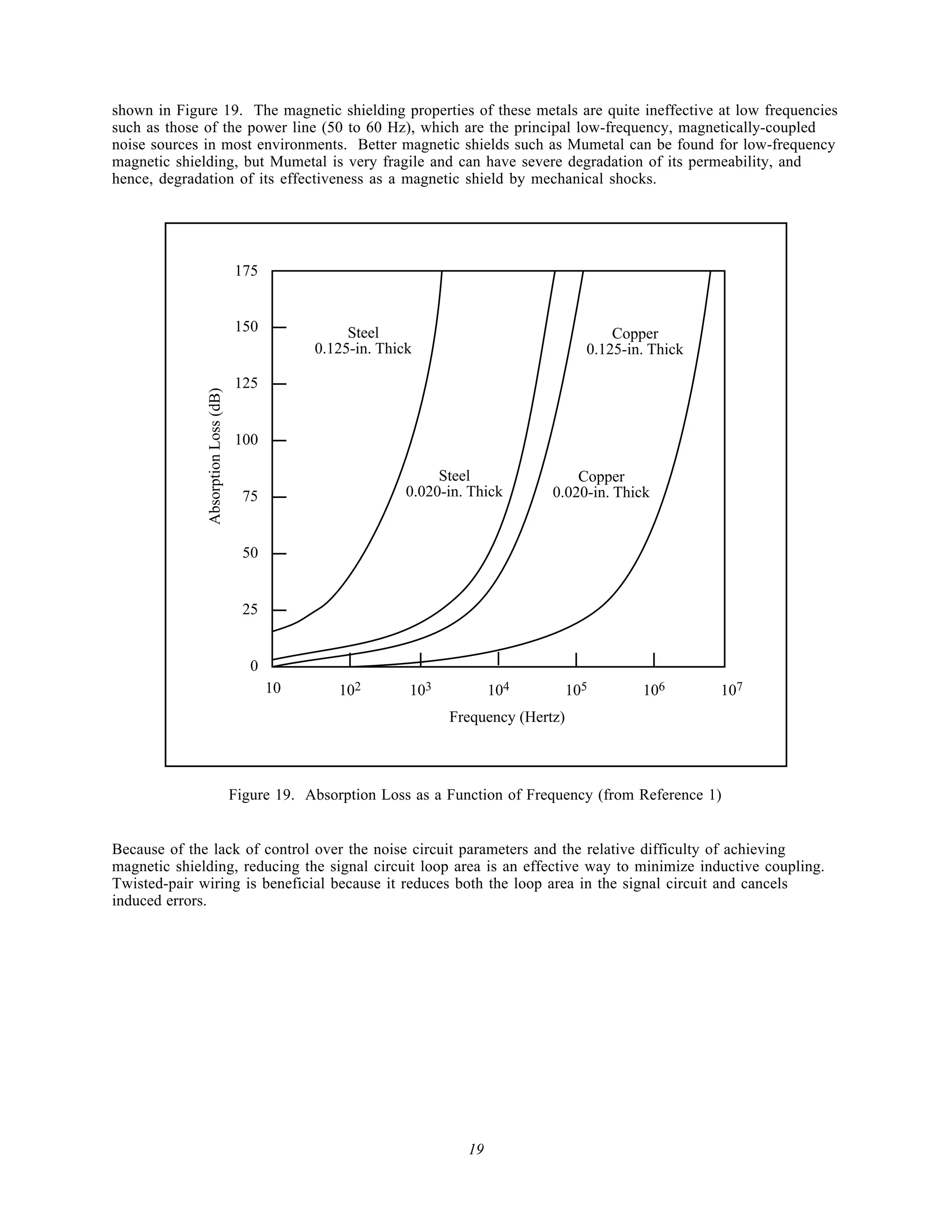
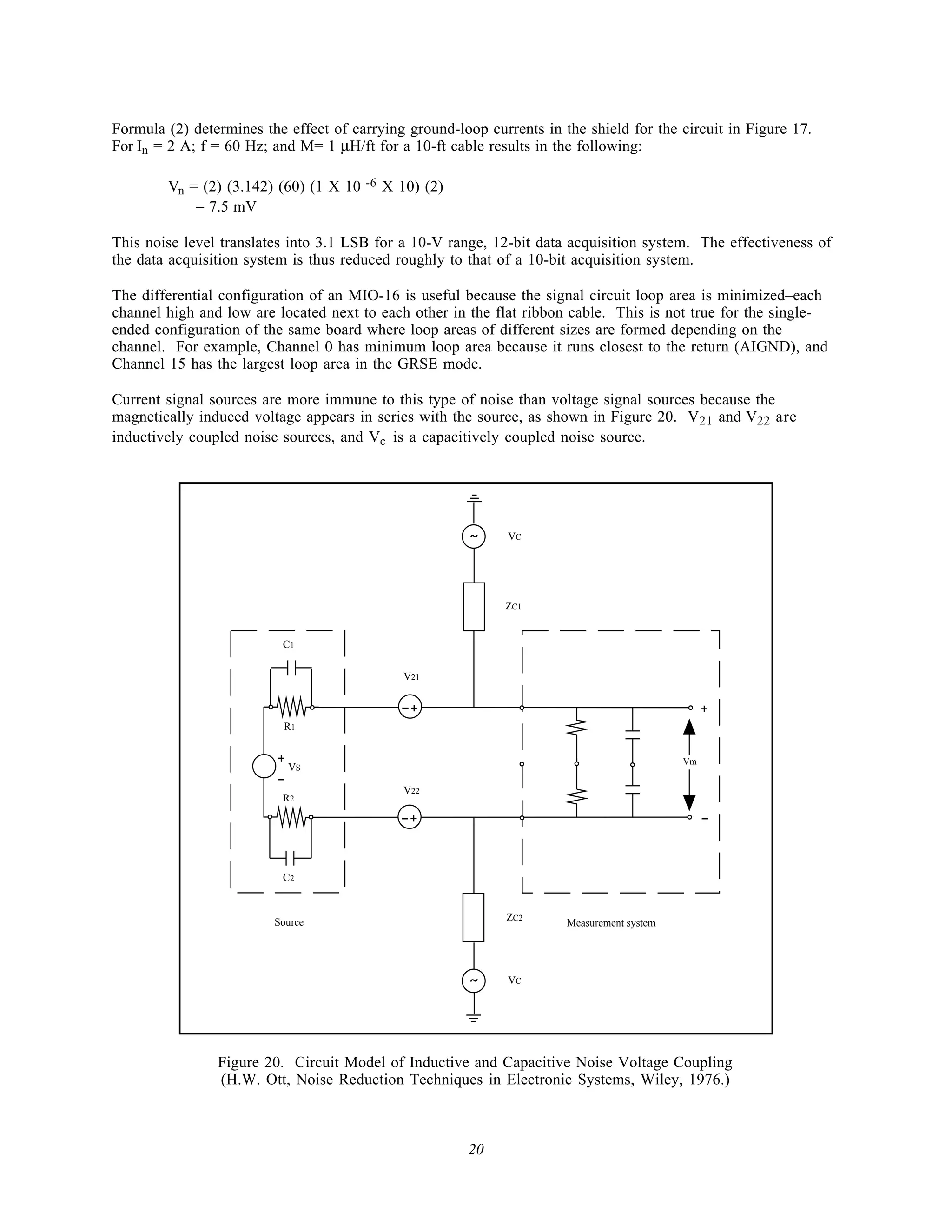
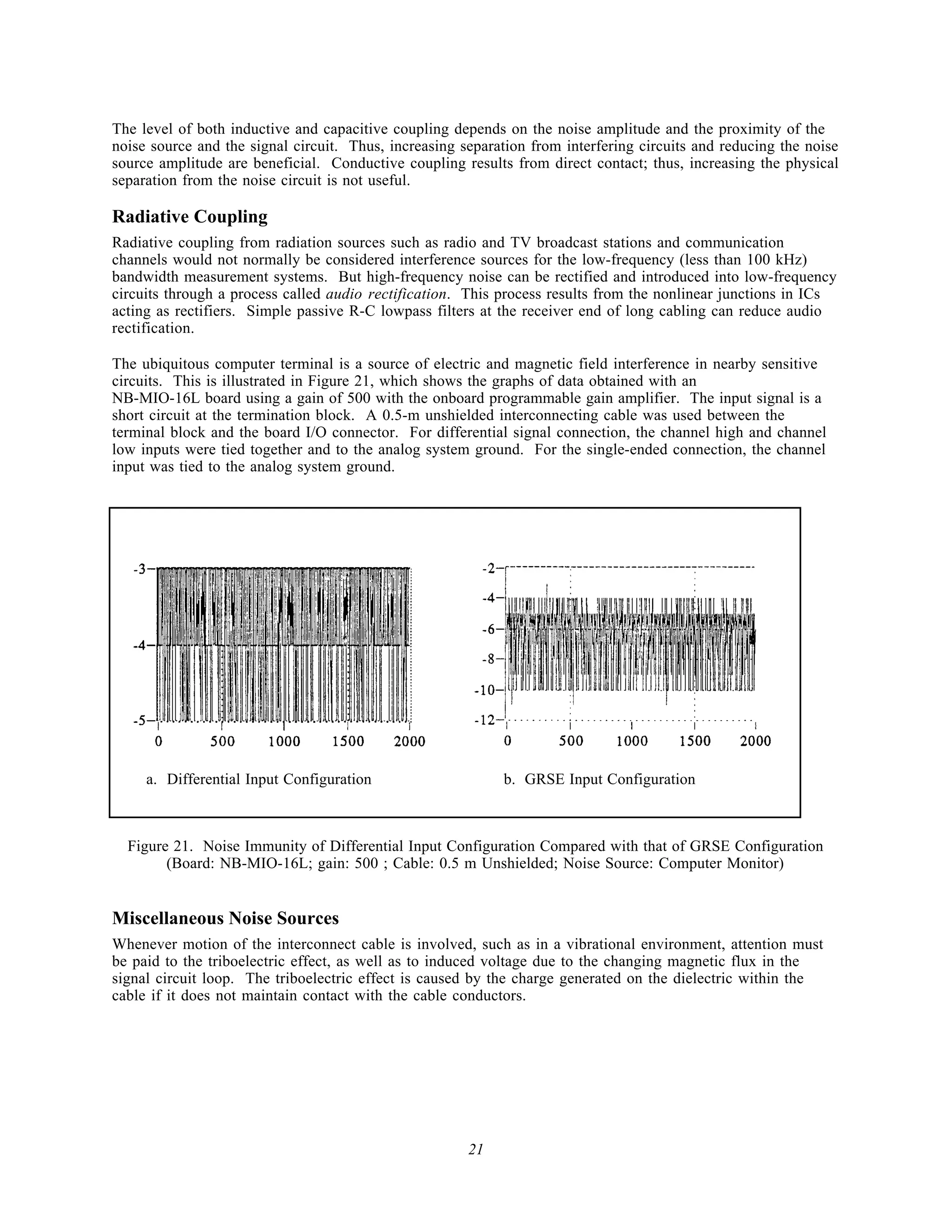
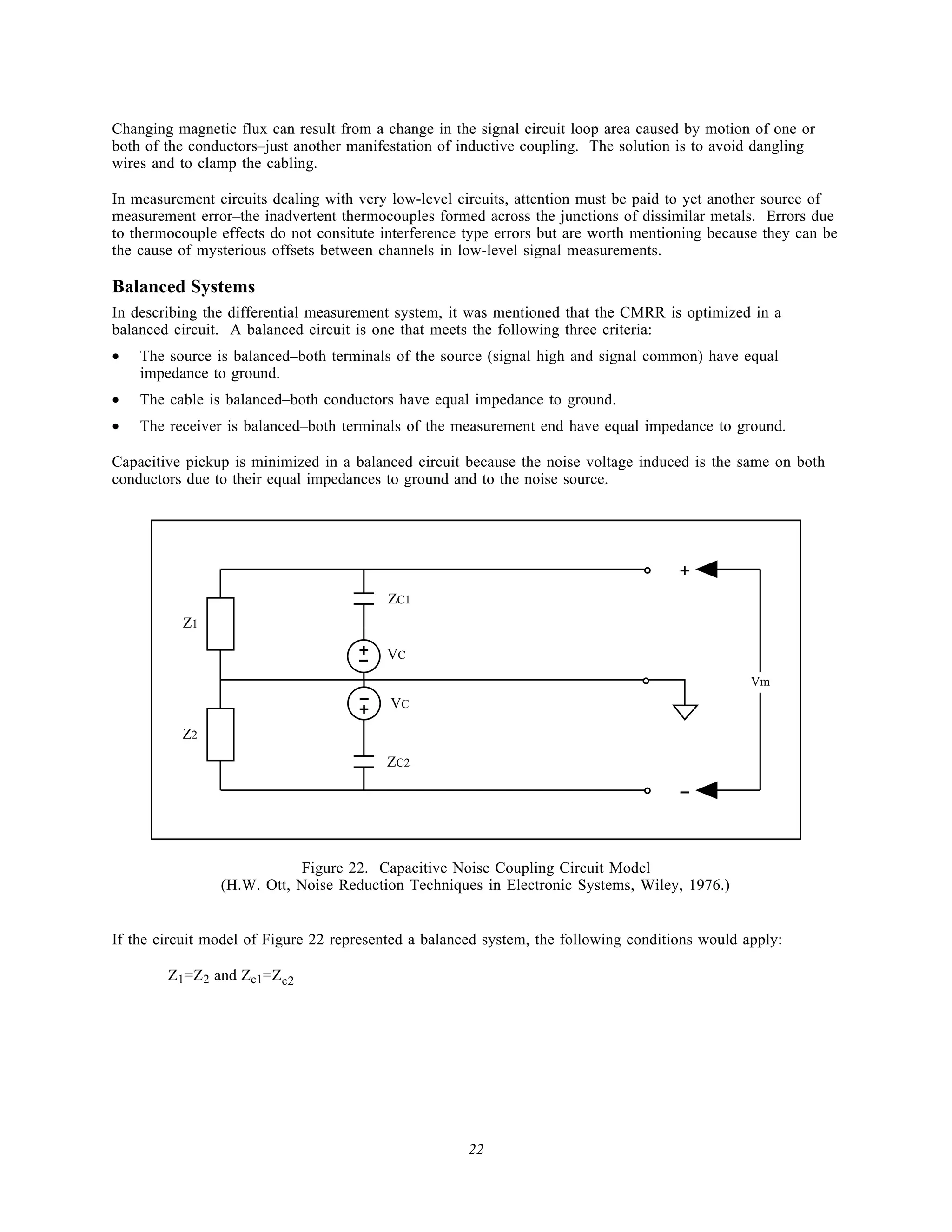
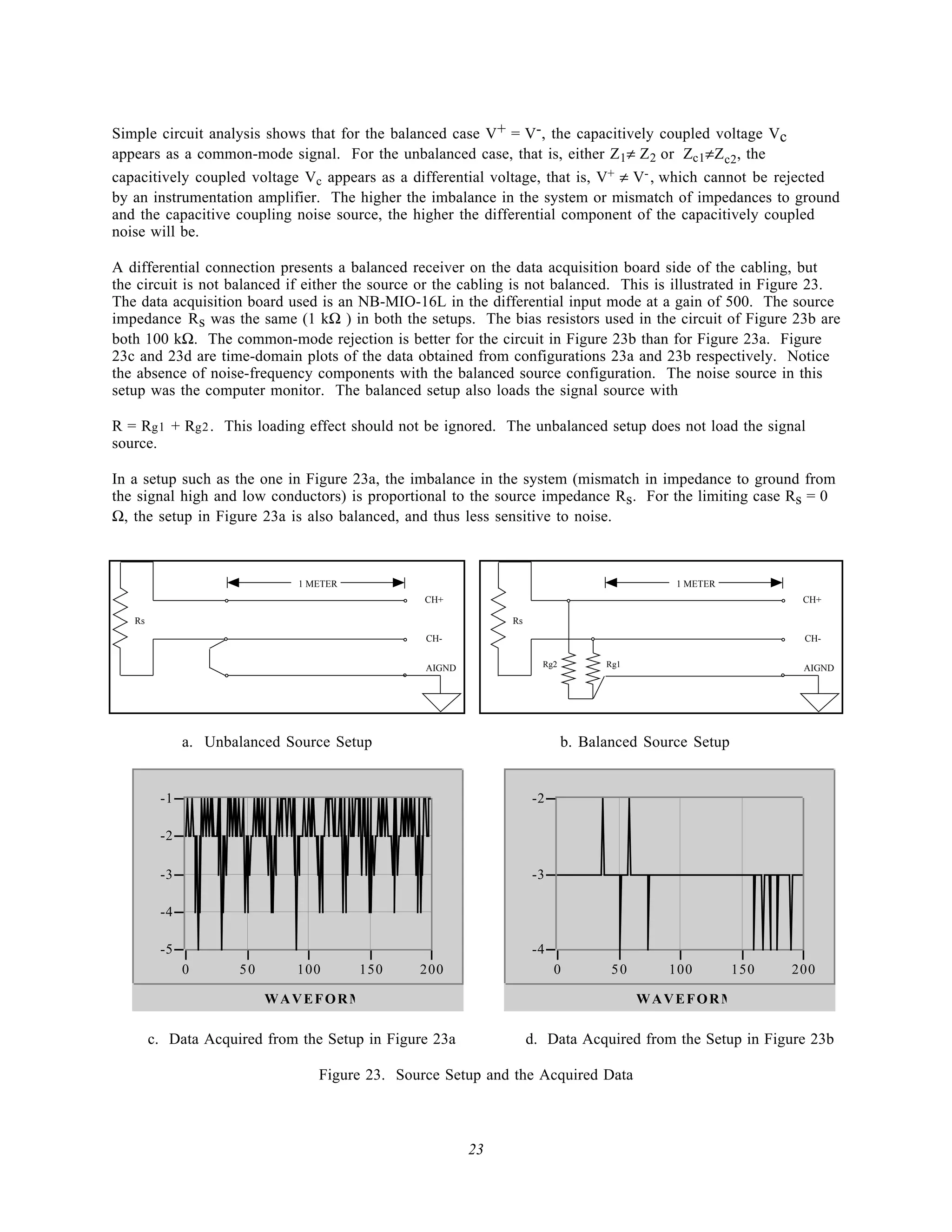
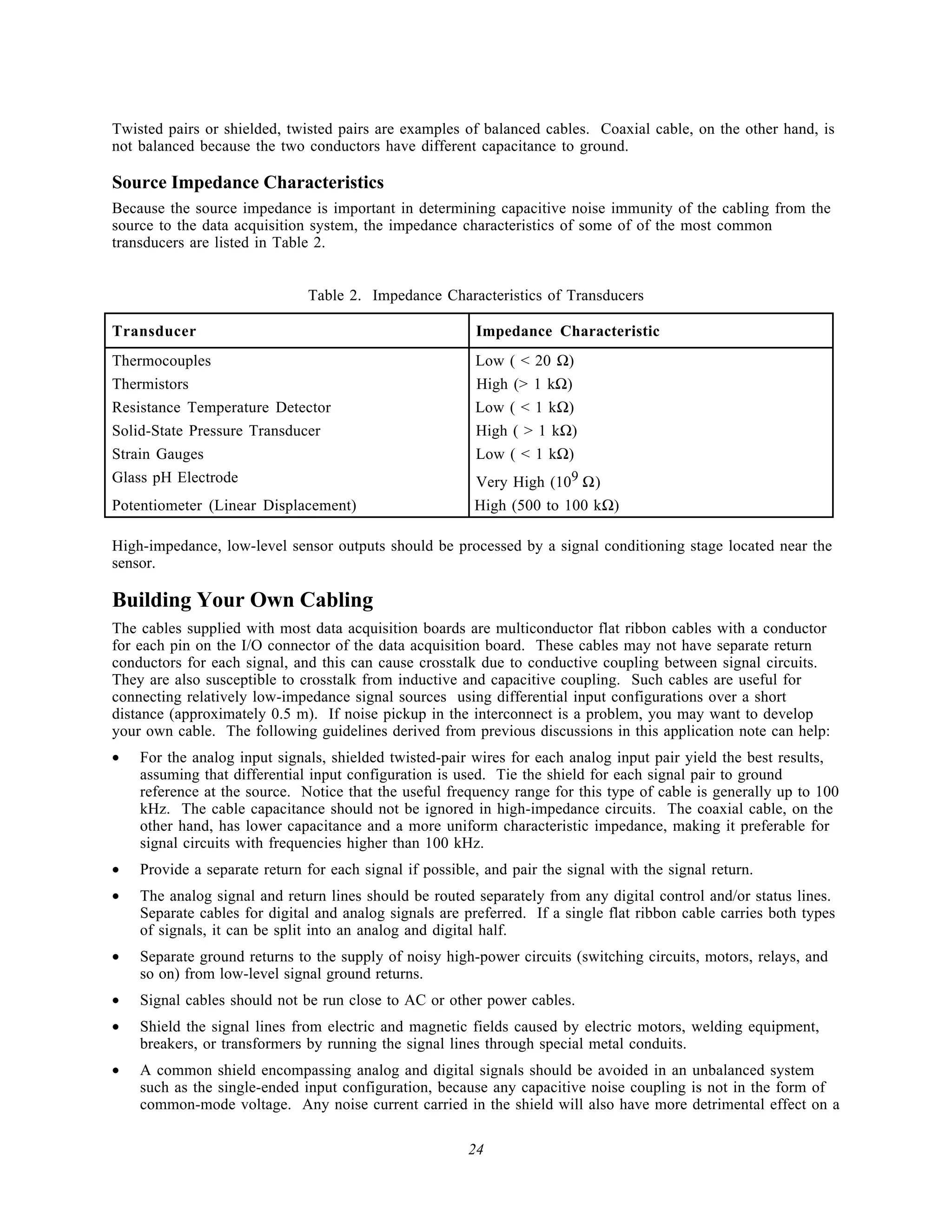
This document discusses field wiring and noise considerations for analog signals in data acquisition systems. It begins by explaining the components of a typical data acquisition system and how the integrity of acquired data depends on the entire analog signal path. It then discusses different types of signal sources that can be measured, including grounded/referenced and ungrounded/floating sources. It also discusses differential and non-referenced measurement systems and key concepts like common-mode voltage and common-mode rejection ratio (CMRR). The goal is to help users choose appropriate input configurations and wiring schemes to minimize noise and ensure accurate measurements.