Download to read offline

Uploaded byym.ygrex@comp
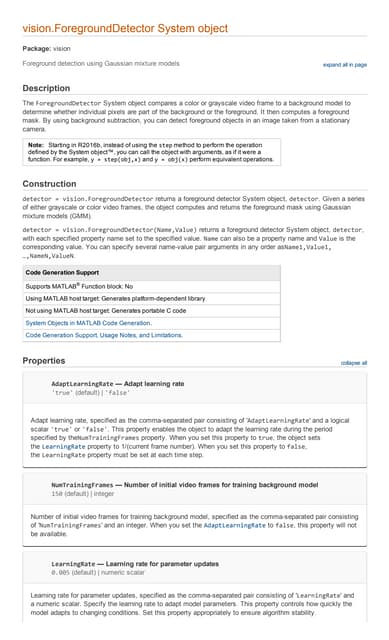
Motion based multiple object tracking - matlab & simulink example
Contoh ini mendemonstrasikan deteksi dan pelacakan objek bergerak dalam video dengan menggunakan algoritma deteksi latar belakang, analisis gumpalan, dan pelacakan berbasis Kalman filter. Objek bergerak terdeteksi dengan menghilangkan latar belakang dan menganalisis kumpulan piksel terhubung, lalu objek dilacak melalui waktu dengan memprediksi lokasi berikutnya menggunakan filter Kalman. Trek ditetapkan ke deteksi berdas



















































Motion based multiple object tracking - matlab & simulink example
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.