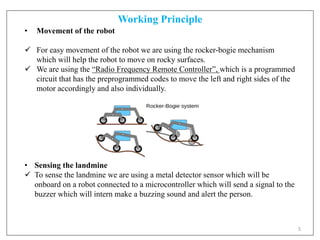
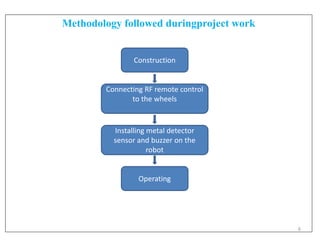
This document summarizes a student project to design a robot for landmine detection. It outlines the problem of landmines remaining after warfare endangering civilians. The robot uses a rocker-bogie mechanism to move over uneven ground and metal detector sensors to identify landmines, alerting operators with a buzzer. So far, students have researched these technologies and built a six-wheeled robot frame with the goal of integrating remote control, sensors, and detection systems to create an autonomous landmine detection robot.